Вам также может понравиться
- Fundamentals of Power System Protection Lecture 2: Protection Paradigms - Apparatus ProtectionДокумент7 страницFundamentals of Power System Protection Lecture 2: Protection Paradigms - Apparatus Protectionsunny1725Оценок пока нет
- How To Protect Transmission LinesДокумент15 страницHow To Protect Transmission Linesneneng beeОценок пока нет
- How To Protect Transmission LinesДокумент12 страницHow To Protect Transmission LinesPatrick HapitaОценок пока нет
- Lec-1 Basics of Distance Protection Zones of Distance Protection Transmission Line ProtectionДокумент28 страницLec-1 Basics of Distance Protection Zones of Distance Protection Transmission Line ProtectionTamjidОценок пока нет
- Power System Protection: Topic: IntroductionДокумент19 страницPower System Protection: Topic: Introductionayan PatelОценок пока нет
- The Importance of Overcurrent ProtectionДокумент9 страницThe Importance of Overcurrent ProtectionR Is100% (1)
- Power System Protection - Part 08Документ16 страницPower System Protection - Part 08Rahul MandalОценок пока нет
- The Fundamentals of Protection Relay Co-Ordination and Timecurrent Grading PrinciplesДокумент9 страницThe Fundamentals of Protection Relay Co-Ordination and Timecurrent Grading Principlesfredhalder99Оценок пока нет
- Module 10: Differential Protection of Bus, Transformer and Generator: Transformer ProtectionДокумент11 страницModule 10: Differential Protection of Bus, Transformer and Generator: Transformer ProtectionNithin Kumar K SОценок пока нет
- Distance Protection of Series Compensated Transmission LineДокумент9 страницDistance Protection of Series Compensated Transmission Lineyand_carlosОценок пока нет
- Protection of Transmission LineДокумент5 страницProtection of Transmission LinekriitkaОценок пока нет
- Earth Fault Protection PDFДокумент27 страницEarth Fault Protection PDFSuresh Chandra PadhyОценок пока нет
- Earth Fault Protection R1Документ27 страницEarth Fault Protection R1Chirobocia GabriellaaОценок пока нет
- Protection of Power Systems: 8. Impedance (Distance) RelaysДокумент41 страницаProtection of Power Systems: 8. Impedance (Distance) RelaysMonika LeonitaОценок пока нет
- Distance ProtectionДокумент14 страницDistance ProtectionBrenda Naranjo MorenoОценок пока нет
- Introduction to Power System ProtectionОт EverandIntroduction to Power System ProtectionРейтинг: 5 из 5 звезд5/5 (1)
- DistanceДокумент16 страницDistanceMostafa Mohmmed100% (1)
- Non-Unit System of Protection: Therefore The Setting of Over Current Relay Should Be More Than 14113.5 AДокумент6 страницNon-Unit System of Protection: Therefore The Setting of Over Current Relay Should Be More Than 14113.5 AyethweОценок пока нет
- Chapter 7Документ8 страницChapter 7Ahmed Said GhonimyОценок пока нет
- Principle of Relay - CH02Документ39 страницPrinciple of Relay - CH02engidawabel100% (1)
- Impact of Distributed Generation On The Overcurrent Protection Scheme For Radial FeedersДокумент21 страницаImpact of Distributed Generation On The Overcurrent Protection Scheme For Radial FeedersTanveer Ul HaqОценок пока нет
- Areva P443 Protection by Areva PaperДокумент6 страницAreva P443 Protection by Areva PaperRajesh BoddunaОценок пока нет
- Protection Systems TransformerДокумент14 страницProtection Systems Transformerrajabharath12Оценок пока нет
- The Implementation of Distance Protection Relay in Transmission LinesДокумент8 страницThe Implementation of Distance Protection Relay in Transmission Lines- witaratamaОценок пока нет
- 2.2 Detection of FaultsДокумент5 страниц2.2 Detection of Faultsmuez zabenОценок пока нет
- Blocking The Distance Relay 3 Zone Operation During Power Swings by DTLR Enhancement in MATLAB/SimulinkДокумент9 страницBlocking The Distance Relay 3 Zone Operation During Power Swings by DTLR Enhancement in MATLAB/SimulinkprojectОценок пока нет
- OC EF RLY SET Chap9-122-151Документ30 страницOC EF RLY SET Chap9-122-151Falulus SalamОценок пока нет
- Jafarian 2019Документ6 страницJafarian 2019khaled solimanОценок пока нет
- Assignment No.1Документ12 страницAssignment No.1NomanОценок пока нет
- Overcurrent Protection For Phase and Earth FaultsДокумент30 страницOvercurrent Protection For Phase and Earth Faultshossein2012100% (1)
- Overcurrent Protection FundamentalsДокумент52 страницыOvercurrent Protection Fundamentalsger80100% (1)
- CIGRE-129 Detection, Location, and Classification of Downed Conductors in Series-Compensated Transmission Lines PDFДокумент8 страницCIGRE-129 Detection, Location, and Classification of Downed Conductors in Series-Compensated Transmission Lines PDFEleazar Sierra EspinozaОценок пока нет
- Lec5 Transformer ProtectionДокумент48 страницLec5 Transformer ProtectionEVTОценок пока нет
- Busbar ProtectionДокумент12 страницBusbar ProtectionAhmed Said GhonimyОценок пока нет
- Reduced Distance RelayingДокумент12 страницReduced Distance Relayingmmorgenwaine9Оценок пока нет
- Fundamentals of Power System ProtectionДокумент22 страницыFundamentals of Power System ProtectionKGОценок пока нет
- Relaying Short LinesДокумент16 страницRelaying Short LinesrogeriojuruaiaОценок пока нет
- 005 PDFДокумент22 страницы005 PDFbansalrОценок пока нет
- Module 6: Distance Protection: Introduction To Distance RelayingДокумент8 страницModule 6: Distance Protection: Introduction To Distance Relayingsunny1725Оценок пока нет
- Tutorial Q and A SupplementaryДокумент25 страницTutorial Q and A SupplementaryKhadar A. FarahОценок пока нет
- Transformer Inrush Conditions in Differential Protection SchemesДокумент25 страницTransformer Inrush Conditions in Differential Protection Schemesengwazi100% (2)
- Protecting Transmission Lines Terminated Into Transformers: Elmo Price and Roger Hedding, ABB IncДокумент12 страницProtecting Transmission Lines Terminated Into Transformers: Elmo Price and Roger Hedding, ABB IncproteccionesОценок пока нет
- Transformer Differential ProtectionДокумент5 страницTransformer Differential Protectionverde24Оценок пока нет
- Bora Scu 2015Документ6 страницBora Scu 2015K.T.Оценок пока нет
- EE466 C5 Distance Protection of Transmission Lines PDFДокумент7 страницEE466 C5 Distance Protection of Transmission Lines PDFSaisreeОценок пока нет
- EE466 C5 Distance Protection of Transmission Lines PDFДокумент7 страницEE466 C5 Distance Protection of Transmission Lines PDFSaisreeОценок пока нет
- EE466 - C5 Distance Protection of Transmission Lines PDFДокумент7 страницEE466 - C5 Distance Protection of Transmission Lines PDFjameelahmadОценок пока нет
- Specification of CTS:: Saturated Values of Rated Burden AreДокумент25 страницSpecification of CTS:: Saturated Values of Rated Burden ArePranendu MaitiОценок пока нет
- Restricted Earth Fault RelayДокумент5 страницRestricted Earth Fault Relaysuleman24750% (2)
- Chapter 1-2-3Документ170 страницChapter 1-2-3Nitish Nageshwara RaoОценок пока нет
- Basic Principles of Distance ProtectionДокумент21 страницаBasic Principles of Distance Protectionsabill arasyid0% (1)
- Protection Unit 2Документ23 страницыProtection Unit 2kailazОценок пока нет
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsОт EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsОценок пока нет
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОт EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОценок пока нет
- Unit 2. Presen SimlpleДокумент4 страницыUnit 2. Presen SimlpleBrenda Naranjo MorenoОценок пока нет
- UNIT 50 Questions 2Документ4 страницыUNIT 50 Questions 2Brenda Naranjo MorenoОценок пока нет
- UNIT 53 Verb-IngДокумент4 страницыUNIT 53 Verb-IngBrenda Naranjo MorenoОценок пока нет
- Unit 13 Present Perfect and Past 1 - BLUE BOOKДокумент3 страницыUnit 13 Present Perfect and Past 1 - BLUE BOOKBrenda Naranjo MorenoОценок пока нет
- UNIT 51 ToДокумент2 страницыUNIT 51 ToBrenda Naranjo MorenoОценок пока нет
- Unit 51auxiliary VerbДокумент2 страницыUnit 51auxiliary VerbBrenda Naranjo MorenoОценок пока нет
- Unit 31 Must and CanДокумент3 страницыUnit 31 Must and CanBrenda Naranjo MorenoОценок пока нет
- Current in Amperes: PD-0003 PD-0003Документ1 страницаCurrent in Amperes: PD-0003 PD-0003Brenda Naranjo MorenoОценок пока нет
- UNIT 53 Verb-IngДокумент4 страницыUNIT 53 Verb-IngBrenda Naranjo MorenoОценок пока нет
- Somebody Will Clean The Room LaterДокумент6 страницSomebody Will Clean The Room LaterBrenda Naranjo MorenoОценок пока нет
- Exercises Unit 49Документ4 страницыExercises Unit 49Brenda Naranjo MorenoОценок пока нет
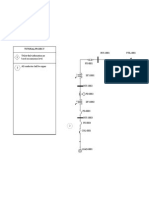
- 1line001 DRWДокумент1 страница1line001 DRWBrenda Naranjo MorenoОценок пока нет
- Current in Amperes: PD-0003 PD-0003Документ1 страницаCurrent in Amperes: PD-0003 PD-0003Brenda Naranjo MorenoОценок пока нет
- TCC2 2Документ1 страницаTCC2 2Brenda Naranjo MorenoОценок пока нет
- Supplementary ExercisesДокумент30 страницSupplementary ExercisesBrenda Naranjo Moreno33% (3)
- Unit 9Документ8 страницUnit 9Brenda Naranjo Moreno100% (6)
- Unit 13 Present Perfect and Past 1 - BLUE BOOKДокумент3 страницыUnit 13 Present Perfect and Past 1 - BLUE BOOKBrenda Naranjo MorenoОценок пока нет
- UNIT 20. (I'm) Goig To (Do)Документ5 страницUNIT 20. (I'm) Goig To (Do)Brenda Naranjo MorenoОценок пока нет
- Infinitive Past Simple Past Participle TraducciónДокумент6 страницInfinitive Past Simple Past Participle TraducciónBrenda Naranjo MorenoОценок пока нет
- Dear KarenДокумент2 страницыDear KarenBrenda Naranjo MorenoОценок пока нет
- Infinitive Past Simple Past Participle TraducciónДокумент1 страницаInfinitive Past Simple Past Participle TraducciónBrenda Naranjo MorenoОценок пока нет
- Proportional Directional Valves: Series LVS08 and LVS12 - Preferred Products ProgrammeДокумент66 страницProportional Directional Valves: Series LVS08 and LVS12 - Preferred Products ProgrammealeksandrОценок пока нет
- Maharashtra State Board of Technical Education (Autonomous) (ISO/IEC - 27001 - 2005 Certified) Winter - 2022 Examination Model Answer Subject: 22619Документ22 страницыMaharashtra State Board of Technical Education (Autonomous) (ISO/IEC - 27001 - 2005 Certified) Winter - 2022 Examination Model Answer Subject: 22619Pratiksha JadhavОценок пока нет
- Question For Practice Oracle (11g) With AnswersДокумент32 страницыQuestion For Practice Oracle (11g) With AnswersAnonymous J8V2pZZ100% (4)
- Lab 3 Pre LabДокумент3 страницыLab 3 Pre LabMina VoОценок пока нет
- Spice-Simulation Using LTspice Part 1Документ76 страницSpice-Simulation Using LTspice Part 1suzsoltОценок пока нет
- Regnet Research Paper SeriesДокумент7 страницRegnet Research Paper Seriesnqdpuhxgf100% (1)
- JAVA NotesДокумент12 страницJAVA NotesVarun BawaОценок пока нет
- ECA 2markДокумент4 страницыECA 2markthangarajelectresОценок пока нет
- Computer Networks: Introduction (Chapter 1)Документ92 страницыComputer Networks: Introduction (Chapter 1)Speed PianoОценок пока нет
- Manual Dimmer BukeДокумент10 страницManual Dimmer BukeJavi KatzОценок пока нет
- 4.uses of Metals - 1-32 For StudentsДокумент13 страниц4.uses of Metals - 1-32 For StudentsnergisalihpasaogluОценок пока нет
- Calcium Ethoxide As A Solid Base Catalyst For The PDFДокумент15 страницCalcium Ethoxide As A Solid Base Catalyst For The PDFHelmi BaharОценок пока нет
- Packet Life BookДокумент28 страницPacket Life BookboucheravОценок пока нет
- S ParametersДокумент29 страницS ParameterseloiseОценок пока нет
- P103154 - 7.00 - Doc - Manual - 8000 WindlassДокумент43 страницыP103154 - 7.00 - Doc - Manual - 8000 WindlassDanОценок пока нет
- Digital - 123328-R010818-Analisa Balik-BibliografiДокумент5 страницDigital - 123328-R010818-Analisa Balik-BibliografiEncep Septian CaturОценок пока нет
- Thermal Analysis and Compensation of A Double Column Machining CentreДокумент9 страницThermal Analysis and Compensation of A Double Column Machining CentreShamanth CОценок пока нет
- Hide Answer Notebook Notebook Discuss: Here Is The Answer and ExplanationДокумент16 страницHide Answer Notebook Notebook Discuss: Here Is The Answer and ExplanationPayashwini KulkarniОценок пока нет
- HyperMILL Readme enДокумент20 страницHyperMILL Readme enjimОценок пока нет
- DefaultДокумент49 страницDefaultmaruka33100% (1)
- C 13Документ33 страницыC 13rgerwwaaОценок пока нет
- Faber, De-Ontologizing GodДокумент15 страницFaber, De-Ontologizing GodcalfrancescoОценок пока нет
- Evaluating Capital ProjectsДокумент254 страницыEvaluating Capital Projectsariff_sodriОценок пока нет
- 1SC0 2PF Exam-Paper 20180616Документ20 страниц1SC0 2PF Exam-Paper 20180616Thasanya AlgamaОценок пока нет
- 5.4.1 EM Patch Release NotesДокумент11 страниц5.4.1 EM Patch Release Notessuraj saketОценок пока нет
- SMS SRH-2D SedimentTransportДокумент19 страницSMS SRH-2D SedimentTransportthendyОценок пока нет
- 111Документ10 страниц111Phước Ng50% (2)
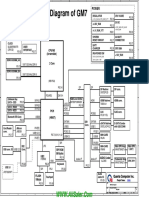
- Dell XPS 17 Quanta GM7 Rev D SchematicsДокумент39 страницDell XPS 17 Quanta GM7 Rev D SchematicsvcompumatikОценок пока нет
- LSM330DLДокумент54 страницыLSM330DLalexanderОценок пока нет