Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Data Acquisition (DAQ) 1Документ57 страницData Acquisition (DAQ) 1ahmed4665100% (1)
- How To Communicate With Parallel PortДокумент24 страницыHow To Communicate With Parallel Portahmed4665100% (6)
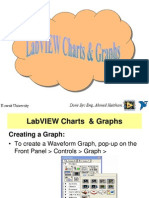
- LabVIEW Charts & GraphsДокумент29 страницLabVIEW Charts & Graphsahmed4665100% (1)
- Communication For Work Purposes PDFДокумент5 страницCommunication For Work Purposes PDFDominic100% (8)
- 4 - Frequency Response AnalysisДокумент30 страниц4 - Frequency Response Analysisahmed4665Оценок пока нет
- ParallelismДокумент16 страницParallelismahmed4665Оценок пока нет
- Implementation of Virtual Assistant With Sign Language Using Deep Learning and Tensor FlowДокумент4 страницыImplementation of Virtual Assistant With Sign Language Using Deep Learning and Tensor FlowIJRASETPublicationsОценок пока нет
- 6 - Analyzing State-Space CharacteristicДокумент20 страниц6 - Analyzing State-Space Characteristicahmed4665100% (1)
- 3 - Time Response AnalysisДокумент24 страницы3 - Time Response Analysisahmed4665Оценок пока нет
- 5 - Stability & Root LocusДокумент10 страниц5 - Stability & Root Locusahmed4665Оценок пока нет
- AC Signals & SamplingДокумент10 страницAC Signals & Samplingahmed4665Оценок пока нет
- Counters and DAQДокумент61 страницаCounters and DAQahmed4665Оценок пока нет
- How To Use 6211Документ23 страницыHow To Use 6211ahmed4665Оценок пока нет
- Reading and Writing Audio Files in LabVIEWДокумент15 страницReading and Writing Audio Files in LabVIEWahmed4665Оценок пока нет
- State MachinesДокумент28 страницState Machinesahmed4665Оценок пока нет
- LabVIEW ClustersДокумент9 страницLabVIEW Clustersahmed4665Оценок пока нет
- LabVIEW Data Types & Conversions Between These TypesДокумент23 страницыLabVIEW Data Types & Conversions Between These Typesahmed4665100% (4)
- Labview File IoДокумент18 страницLabview File Ioahmed4665Оценок пока нет
- LabVIEW ArraysДокумент17 страницLabVIEW Arraysahmed4665100% (2)
- LabVIEW StringsДокумент11 страницLabVIEW Stringsahmed4665Оценок пока нет
- Automated Seismic InterpretationДокумент38 страницAutomated Seismic InterpretationAhmedОценок пока нет
- AI Course OutlineДокумент2 страницыAI Course OutlinernyambatiОценок пока нет
- Introduction To PIDДокумент16 страницIntroduction To PIDjocianvefОценок пока нет
- Process Design and Control: Course Code Monday & FridayДокумент37 страницProcess Design and Control: Course Code Monday & FridayElia SaadОценок пока нет
- Ben Brahim 2019Документ13 страницBen Brahim 2019Marwan MayyarОценок пока нет
- Intelligent Systems Design and ApplicatiДокумент1 134 страницыIntelligent Systems Design and Applicatirajmeet singhОценок пока нет
- Stability of Non Autonomous SystemsДокумент4 страницыStability of Non Autonomous SystemsvanalexbluesОценок пока нет
- Makaut 6th Semester SyllabusДокумент22 страницыMakaut 6th Semester Syllabusthesatyajeet.tmslОценок пока нет
- Ai Machine LearningДокумент27 страницAi Machine Learningsahaj deep KaurОценок пока нет
- Plectic Architecture-Towards A Theory of The Post-Digital in ArchitectureДокумент10 страницPlectic Architecture-Towards A Theory of The Post-Digital in ArchitectureAliaa Ahmed ShemariОценок пока нет
- Pointers Oral Comm.Документ2 страницыPointers Oral Comm.Rose Ann Bereber100% (3)
- Parallel Implementation of OPTICS AlgorithmДокумент10 страницParallel Implementation of OPTICS Algorithmzii.wang626Оценок пока нет
- NSF Dear Colleague LetterДокумент2 страницыNSF Dear Colleague LetterjmiscОценок пока нет
- Chapter Eight: Method Is Simpler Than The Corresponding One Based On Bode Diagrams (D) RootДокумент49 страницChapter Eight: Method Is Simpler Than The Corresponding One Based On Bode Diagrams (D) RootAndreeaОценок пока нет
- 06 - Artificial Neural Networks in The Domain of Reservoir Characterization - A Review From Shallow To Deep ModelsДокумент60 страниц06 - Artificial Neural Networks in The Domain of Reservoir Characterization - A Review From Shallow To Deep ModelsAli NasserОценок пока нет
- Proportional Control v3Документ32 страницыProportional Control v3Radomir SoskicОценок пока нет
- Muhammad Azeem: EducationДокумент1 страницаMuhammad Azeem: EducationمحمدعظیمچوھدریОценок пока нет
- Case Study - ClassifierДокумент5 страницCase Study - ClassifierStuti SinghОценок пока нет
- A Bidirectional LSTM Deep Learning Approach For Intrusion DetectionДокумент30 страницA Bidirectional LSTM Deep Learning Approach For Intrusion DetectionImrana YaqoubОценок пока нет
- An Overview of ISO 8000Документ34 страницыAn Overview of ISO 8000divyaОценок пока нет
- Deep Learning by Author of LSTMДокумент26 страницDeep Learning by Author of LSTMNatsuОценок пока нет
- Cassandra 30Документ267 страницCassandra 30Tru VuОценок пока нет
- Information DesignДокумент26 страницInformation DesignNguyễn T. Thúy HằngОценок пока нет
- Automatic ScheduleДокумент5 страницAutomatic ScheduleSaravanan VenkatchalamОценок пока нет
- Linear Block Code MatlabДокумент1 страницаLinear Block Code MatlabroryОценок пока нет
- The Cybernetic Relevance of Architecture:: An Essay On Gordon Pask's Evolving Discourse On ArchitectureДокумент10 страницThe Cybernetic Relevance of Architecture:: An Essay On Gordon Pask's Evolving Discourse On ArchitectureBrendu OtinОценок пока нет
- Neurophilosophy of MindДокумент4 страницыNeurophilosophy of MindfilsoofОценок пока нет
- Importance of Audience Involvement in Technical WritingДокумент5 страницImportance of Audience Involvement in Technical Writing1991sana100% (1)