Вам также может понравиться
- Brushless DC MotorsДокумент14 страницBrushless DC MotorsNeroGetsu100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- The Evolution of TurboMachinery DesignДокумент46 страницThe Evolution of TurboMachinery DesignsmhbОценок пока нет
- The Evolution of TurboMachinery DesignДокумент46 страницThe Evolution of TurboMachinery DesignsmhbОценок пока нет
- Design AnalysisДокумент22 страницыDesign AnalysisAllanОценок пока нет
- Technical Guide 6 HarmonicsДокумент32 страницыTechnical Guide 6 HarmonicsLucian ConstantinОценок пока нет
- Uef T Sept 2007 FullДокумент65 страницUef T Sept 2007 FullsmhbОценок пока нет
- Abb Technical Guide No.6 RevcДокумент36 страницAbb Technical Guide No.6 RevcJr PazОценок пока нет
- Total Soccer FitnessДокумент163 страницыTotal Soccer FitnesssmhbОценок пока нет
- ZAPI AC-1 ManualДокумент62 страницыZAPI AC-1 ManualRicardo Gamez OrtegaОценок пока нет
- Motor CalculationsДокумент8 страницMotor CalculationssmhbОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- EPL Academy Tour06 PDFДокумент37 страницEPL Academy Tour06 PDFsmhbОценок пока нет
- ABB Guide To Harmonics With AC DrivesДокумент36 страницABB Guide To Harmonics With AC DrivesTeja KusumaОценок пока нет
- of BLDCДокумент45 страницof BLDCsmhbОценок пока нет
- Sheff United Academy PDFДокумент30 страницSheff United Academy PDFduncfearnhead100% (1)
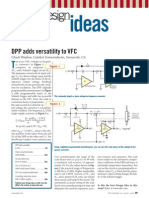
- Voltage To Frequency ConverterДокумент7 страницVoltage To Frequency ConverterRodfer SorianoОценок пока нет
- Motor ControlsДокумент40 страницMotor ControlsArlone ManaladОценок пока нет
- Stabilizing Resistor in Motor Earth-Fault ProtectionДокумент12 страницStabilizing Resistor in Motor Earth-Fault ProtectionSuhas AcharyaОценок пока нет
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОт EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОценок пока нет
- Bordeaux, France-Functional TrainingДокумент3 страницыBordeaux, France-Functional TrainingsmhbОценок пока нет
- Project On Ac Voltage Controller Using TriacДокумент33 страницыProject On Ac Voltage Controller Using Triackatul830486% (7)
- $ Power Supply DesignДокумент164 страницы$ Power Supply Designquangntn88Оценок пока нет
- F.C. Porto-Offensive and Defensive TransitionДокумент4 страницыF.C. Porto-Offensive and Defensive TransitionsmhbОценок пока нет
- Turbomachinery Design Tools For Teaching Design Concepts For Axial Flow Fans - Compressors and TurbinesДокумент16 страницTurbomachinery Design Tools For Teaching Design Concepts For Axial Flow Fans - Compressors and TurbinessmhbОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- TechRef RectifierДокумент28 страницTechRef RectifierАлишер ГалиевОценок пока нет
- 3 Phase Ac Motor Control With VHZ Speed Closed Loop Using The 56f800eДокумент36 страниц3 Phase Ac Motor Control With VHZ Speed Closed Loop Using The 56f800ePrabhu RajОценок пока нет
- Vertical Defletion ThomsonДокумент25 страницVertical Defletion ThomsonAbubakar SidikОценок пока нет
- LHF 630 & 800 File 0740 800 028Документ34 страницыLHF 630 & 800 File 0740 800 028Madalina Lazar100% (1)
- Digsilent Powerfactory: Technical Reference DocumentationДокумент12 страницDigsilent Powerfactory: Technical Reference DocumentationmingОценок пока нет
- Man PSS Ug en 0198Документ34 страницыMan PSS Ug en 0198James HowardОценок пока нет
- Cd00020086 Sensorless BLDC Motor Control and Bemf Sampling Methods With St7mc StmicroelectronicsДокумент35 страницCd00020086 Sensorless BLDC Motor Control and Bemf Sampling Methods With St7mc StmicroelectronicsmortezaОценок пока нет
- Solution For 150 W Half Bridge Resonant DC-DC ConverterДокумент13 страницSolution For 150 W Half Bridge Resonant DC-DC ConverterFabrício AngieneОценок пока нет
- Block diagrams of an RTB rectifier systemДокумент17 страницBlock diagrams of an RTB rectifier systemzakalyОценок пока нет
- AN2154 Application Note: Space Vector Modulation Using 8-Bit ST7MC Microcontroller and ST7MC-KIT/BLDC Starter KitДокумент16 страницAN2154 Application Note: Space Vector Modulation Using 8-Bit ST7MC Microcontroller and ST7MC-KIT/BLDC Starter KitSean ShugarОценок пока нет
- Atmel 8311 AVR1607 Brushless DC Motor Control in Sensor Mode Using ATxmega128A1 and ATAVRMC323 Application NoteДокумент18 страницAtmel 8311 AVR1607 Brushless DC Motor Control in Sensor Mode Using ATxmega128A1 and ATAVRMC323 Application NoteRoberto CasperОценок пока нет
- Sensorless ACIM Field-Oriented Control: Design Reference ManualДокумент40 страницSensorless ACIM Field-Oriented Control: Design Reference ManualGeorge VasquezОценок пока нет
- Evaluation Board For Off-Line Forward Converter Based On L5991Документ25 страницEvaluation Board For Off-Line Forward Converter Based On L5991Grzegorz WegnerОценок пока нет
- Inverter and BLDC ProjectДокумент19 страницInverter and BLDC ProjectArjun MathiasОценок пока нет
- Features: Half-Bridge Gate DriverДокумент19 страницFeatures: Half-Bridge Gate DriverLakshmana Rao VОценок пока нет
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsДокумент6 страницA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviОценок пока нет
- UPS SystemДокумент4 страницыUPS Systemमृत्युंजय झाОценок пока нет
- Application Note: Power Card For Motor DriveДокумент13 страницApplication Note: Power Card For Motor DriveHamid BassourОценок пока нет
- Simple 1.5-V Boost Converter For MSP430 - Slaa105Документ7 страницSimple 1.5-V Boost Converter For MSP430 - Slaa105Daniel ZancoОценок пока нет
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveДокумент8 страницComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulОценок пока нет
- Speed Control of PMSM by Using DSVM - DTC TechniqueДокумент5 страницSpeed Control of PMSM by Using DSVM - DTC TechniqueKushagra KhamesraОценок пока нет
- AN2317 Application Note: STPM01 Programmable, Single-Phase Energy Metering IC External CircuitsДокумент27 страницAN2317 Application Note: STPM01 Programmable, Single-Phase Energy Metering IC External CircuitsJitender SharmaОценок пока нет
- AN025-DC Motor Control With TMC4671Документ11 страницAN025-DC Motor Control With TMC4671Roland von KurnatowskiОценок пока нет
- Design Strategy For A 3-Phase Variable Frequency Drive (VFD) PDFДокумент37 страницDesign Strategy For A 3-Phase Variable Frequency Drive (VFD) PDFSamuel Mushaka100% (1)
- DC/DC Boost Converter Report: Do Nguyen NghiaДокумент34 страницыDC/DC Boost Converter Report: Do Nguyen NghiaNguyên NghĩaОценок пока нет
- Guia Tecnica Abb N°6Документ36 страницGuia Tecnica Abb N°6kamuikОценок пока нет
- Research Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper DrivesДокумент4 страницыResearch Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper Drivesdivyamanikandan007Оценок пока нет
- Rong Cai MSCДокумент122 страницыRong Cai MSCtien chau minhОценок пока нет
- AN2450-L6599 Application Note PDFДокумент32 страницыAN2450-L6599 Application Note PDF양영주Оценок пока нет
- An-1048 (1) BLDC Driver LossДокумент9 страницAn-1048 (1) BLDC Driver LossDeepa DevarajОценок пока нет
- CD00074286Документ42 страницыCD00074286Ergün GülbitenОценок пока нет
- 3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80XДокумент24 страницы3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80Xrutu_jnecОценок пока нет
- AN437 Application NoteДокумент20 страницAN437 Application NoteEdgar MuñozОценок пока нет
- STM6315RDW13FДокумент21 страницаSTM6315RDW13FArunkumar PbОценок пока нет
- Direct Torque Control of Induction MotorsДокумент6 страницDirect Torque Control of Induction MotorsInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Chopper Controlled DC Drive: INSTRUCTED BY: Dr. BuddhikaДокумент8 страницChopper Controlled DC Drive: INSTRUCTED BY: Dr. BuddhikaNipuna Thushara WijesekaraОценок пока нет
- Experiment No. - 2: AIM: - To Perform Short Circuit Test On Three Phase AlternatorДокумент6 страницExperiment No. - 2: AIM: - To Perform Short Circuit Test On Three Phase AlternatorLEARN TO SIMPLE WAYОценок пока нет
- S6e1a1 - An710 00001 e 1v0 3 Phase Acim Scalar ControlДокумент22 страницыS6e1a1 - An710 00001 e 1v0 3 Phase Acim Scalar Controlandrei.ciobanasuОценок пока нет
- U-93 Application NOTE A New Integrated Circuit For Current Mode ControlДокумент9 страницU-93 Application NOTE A New Integrated Circuit For Current Mode ControlpramodОценок пока нет
- Micro Controller Single Phase RectifireДокумент23 страницыMicro Controller Single Phase RectifireMark ClarkeОценок пока нет
- Toshiba VCR Training M-653Документ31 страницаToshiba VCR Training M-653Nachiket KshirsagarОценок пока нет
- Power Systems-On-Chip: Practical Aspects of DesignОт EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardОценок пока нет
- 02 12 16 146784Документ11 страниц02 12 16 146784Alejandro GilОценок пока нет
- DC Motor ControlДокумент29 страницDC Motor ControlsmhbОценок пока нет
- Industrial Power Corruptor User Manual 1.00 RevДокумент59 страницIndustrial Power Corruptor User Manual 1.00 RevsmhbОценок пока нет
- MotorДокумент45 страницMotorsmhbОценок пока нет
- BLDC & Weapon SystemsДокумент8 страницBLDC & Weapon SystemssmhbОценок пока нет
- Motor DriveДокумент40 страницMotor DrivevinaybabaОценок пока нет
- Lecture For Complex VariablesДокумент83 страницыLecture For Complex VariablessmhbОценок пока нет
- Synchronous Machine Parameter Estimation Using Orthogonal Series ExpansionДокумент14 страницSynchronous Machine Parameter Estimation Using Orthogonal Series ExpansionsmhbОценок пока нет
- Servo Motor Equations - Time ConstantsДокумент7 страницServo Motor Equations - Time ConstantssmhbОценок пока нет
- CFD Simulation of Complex Flows in Turbomachinery and Robust Optimization of Blade DesignДокумент259 страницCFD Simulation of Complex Flows in Turbomachinery and Robust Optimization of Blade DesignsmhbОценок пока нет
- CFD Simulation of Complex Flows in Turbomachinery and Robust Optimization of Blade DesignДокумент259 страницCFD Simulation of Complex Flows in Turbomachinery and Robust Optimization of Blade DesignsmhbОценок пока нет
- 3 V 3 For PenetrationДокумент1 страница3 V 3 For PenetrationsmhbОценок пока нет
- In and Out #2: Emphasis: Dribbling at Speed, Passing. Set-UpДокумент1 страницаIn and Out #2: Emphasis: Dribbling at Speed, Passing. Set-UpsmhbОценок пока нет
- In and Out #3: Emphasis: Dribbling at Speed, Change of Direction, Timing of Runs, Passing. Set-UpДокумент1 страницаIn and Out #3: Emphasis: Dribbling at Speed, Change of Direction, Timing of Runs, Passing. Set-UpsmhbОценок пока нет
- English Premier League Academy-Attacking MovementsДокумент2 страницыEnglish Premier League Academy-Attacking MovementssmhbОценок пока нет
- VVV-Venlo Under 17's-Passing and PossessionДокумент2 страницыVVV-Venlo Under 17's-Passing and PossessionSorin ColceagОценок пока нет
- In and Out #1: Emphasis: Dribbling at Speed, Change of Direction, Passing. Set-UpДокумент1 страницаIn and Out #1: Emphasis: Dribbling at Speed, Change of Direction, Passing. Set-UpsmhbОценок пока нет
- EPL Academy Tour Journal PDFДокумент52 страницыEPL Academy Tour Journal PDFsmhbОценок пока нет