Вам также может понравиться
- CFX-FSI 120 Lect-05 6DOFДокумент21 страницаCFX-FSI 120 Lect-05 6DOFĐạiChômChômОценок пока нет
- CFX Fsi 6dofДокумент26 страницCFX Fsi 6dofCFDiran.irОценок пока нет
- Mech-RBD 13.0 L03Документ52 страницыMech-RBD 13.0 L03Shaheen S. RatnaniОценок пока нет
- Mech-Intro 13.0 AppA BucklingДокумент34 страницыMech-Intro 13.0 AppA Bucklingstathiss11Оценок пока нет
- Post-Processing With CFD-Post - (WWW - Cfdiran.ir)Документ42 страницыPost-Processing With CFD-Post - (WWW - Cfdiran.ir)mohmehrОценок пока нет
- RotaryДокумент35 страницRotaryJason SheltonОценок пока нет
- Fluent12 Lecture11 PostДокумент49 страницFluent12 Lecture11 PostAlex__182Оценок пока нет
- CFX Intro 13.0 L05 PostДокумент50 страницCFX Intro 13.0 L05 Postwatch_sutОценок пока нет
- Mech RBD 13 0 L04Документ23 страницыMech RBD 13 0 L04Mohamed LaissyОценок пока нет
- Mech-Intro 13.0 WS03.1 ContactДокумент13 страницMech-Intro 13.0 WS03.1 ContactAjay ChackoОценок пока нет
- Ansys Mechanical PostProcessingДокумент28 страницAnsys Mechanical PostProcessingYuryОценок пока нет
- ANSYS FSI For Thermal Management and Aeroelasticity 11th May 2011 PDFДокумент52 страницыANSYS FSI For Thermal Management and Aeroelasticity 11th May 2011 PDFdharmeswarОценок пока нет
- Ansys Workbench and Designmodeler: May 11, 2007 © 2007 Ansys, Inc. All Rights Reserved. Ansys, Inc. ProprietaryДокумент24 страницыAnsys Workbench and Designmodeler: May 11, 2007 © 2007 Ansys, Inc. All Rights Reserved. Ansys, Inc. ProprietarytobeloyaltyОценок пока нет
- Modeling Layered Composites The Simple WayДокумент33 страницыModeling Layered Composites The Simple WayAdil KaplanserenОценок пока нет
- 1301 ENME442 Lab8 AnsysДокумент22 страницы1301 ENME442 Lab8 AnsyshidaiОценок пока нет
- 1301 ENME442 Lab8 Ansys PDFДокумент22 страницы1301 ENME442 Lab8 Ansys PDFhidaiОценок пока нет
- Mechanical Intro 17.0 M03 Structural AnalysisДокумент49 страницMechanical Intro 17.0 M03 Structural AnalysisSamedŠkuljОценок пока нет
- AM-Intro 13.0 L03 Global Mesh SettingsДокумент37 страницAM-Intro 13.0 L03 Global Mesh SettingsCarlos AméricoОценок пока нет
- AM Global Mesh SettingsДокумент37 страницAM Global Mesh SettingsSergio O. Chong LugoОценок пока нет
- ANSYS Fluid Dynamics Update - ANSYSДокумент96 страницANSYS Fluid Dynamics Update - ANSYSBhaskar Nandi100% (1)
- Ansys Mechanical TrainingДокумент54 страницыAnsys Mechanical TrainingAbhijeet Gandage100% (3)
- Mech AC 160 L03-Bolt PretensionДокумент24 страницыMech AC 160 L03-Bolt PretensionPercy Romero MurilloОценок пока нет
- Mechanical-Nonlin 13.0 App2A Element TechnologyДокумент57 страницMechanical-Nonlin 13.0 App2A Element TechnologyShaheen S. RatnaniОценок пока нет
- Introduction To ANSYS Mechanical: Workshop 5.1 Linear Structural AnalysisДокумент20 страницIntroduction To ANSYS Mechanical: Workshop 5.1 Linear Structural AnalysisAjay Chacko100% (1)
- AGARD445 Workshop PDFДокумент39 страницAGARD445 Workshop PDFBhaskar Nandi100% (1)
- ANSYS Academic R13.0Документ63 страницыANSYS Academic R13.0Bi8ikityОценок пока нет
- Introduction To ANSYS Mechanical: Workshop 8.1 Meshing EvaluationДокумент19 страницIntroduction To ANSYS Mechanical: Workshop 8.1 Meshing EvaluationAjay ChackoОценок пока нет
- Introduction To ANSYS Rigid and Flexible Dynamic AnalysisДокумент36 страницIntroduction To ANSYS Rigid and Flexible Dynamic AnalysisIsrar UllahОценок пока нет
- ANSYS AUTODYN in Workbench IntroductionДокумент51 страницаANSYS AUTODYN in Workbench IntroductionMaheswaran Muthaiyan100% (1)
- Workflow: MSC ADAMS (Automated Dynamic Analysis of Mechanical Systems) View WalkthroughДокумент4 страницыWorkflow: MSC ADAMS (Automated Dynamic Analysis of Mechanical Systems) View WalkthroughJayОценок пока нет
- HFSS SolverOnDemandДокумент47 страницHFSS SolverOnDemandhossein_jalili7135Оценок пока нет
- Introduction To ANSYS Mechanical: Workshop 6.1 Free Vibration AnalysisДокумент11 страницIntroduction To ANSYS Mechanical: Workshop 6.1 Free Vibration AnalysisAjay ChackoОценок пока нет
- WB Poly Meshing For FluentДокумент33 страницыWB Poly Meshing For Fluentsainath_84Оценок пока нет
- WB-Mech 121 Ch01 IntroДокумент38 страницWB-Mech 121 Ch01 IntroJcarlos HcastroОценок пока нет
- Introduction To ANSYS Mechanical: Workshop 6.1 Free Vibration AnalysisДокумент11 страницIntroduction To ANSYS Mechanical: Workshop 6.1 Free Vibration Analysisaslekha100% (1)
- Chapter 11: Using A Single Rotating Reference FrameДокумент36 страницChapter 11: Using A Single Rotating Reference FrameramgopaljhaОценок пока нет
- Autodyn BasicsДокумент32 страницыAutodyn Basicsdarklord338100% (1)
- WB-Mech 121 WS 04.1Документ10 страницWB-Mech 121 WS 04.1Gabriel Rodríguez CajasОценок пока нет
- Mechanical-Nonlin 13.0 Ch06 Rate Dependent CreepДокумент31 страницаMechanical-Nonlin 13.0 Ch06 Rate Dependent CreepRAMKUMARОценок пока нет
- ANSYS Tutorial CFX Re-Meshing - EDRДокумент12 страницANSYS Tutorial CFX Re-Meshing - EDRnes1b0Оценок пока нет
- 4 Polyflow - 12.1 Polyflow BДокумент17 страниц4 Polyflow - 12.1 Polyflow BAndre OliveiraОценок пока нет
- Mechanical Intro 17.0 M03 Structural Analysis PDFДокумент49 страницMechanical Intro 17.0 M03 Structural Analysis PDFFedericaОценок пока нет
- Adv DM v6.3 06a Coupled FlowДокумент17 страницAdv DM v6.3 06a Coupled FlowPor HomeОценок пока нет
- Mech-Intro 13.0 AppB UserWkshopДокумент4 страницыMech-Intro 13.0 AppB UserWkshopRichard HilsonОценок пока нет
- ICEM-Intro 13.0 WS3.2 Wingbody ShellДокумент11 страницICEM-Intro 13.0 WS3.2 Wingbody ShellRocio GonzalezОценок пока нет
- Introduction To CFX: Domains and Boundary ConditionsДокумент39 страницIntroduction To CFX: Domains and Boundary Conditionspoder123Оценок пока нет
- Intro To FluentДокумент34 страницыIntro To FluentSattar Al-JabairОценок пока нет
- Mechanical Intro 15.0 L05 StaticДокумент47 страницMechanical Intro 15.0 L05 StaticJuan Felipe Uribe CifuentesОценок пока нет
- Ansys Workbench Dynamics v11Документ28 страницAnsys Workbench Dynamics v11josehdxОценок пока нет
- Introduction To CFX: Interfaces, Sources and Additional VariablesДокумент25 страницIntroduction To CFX: Interfaces, Sources and Additional VariablesVignesh WaranОценок пока нет
- Robot KinematicsДокумент84 страницыRobot KinematicsElumalai BoominathanОценок пока нет
- Introduction To ANSYS Mechanical: Static Structural AnalysisДокумент46 страницIntroduction To ANSYS Mechanical: Static Structural AnalysisAllan MarbaniangОценок пока нет
- CFX-Intro 16 L08 MovingZonesДокумент41 страницаCFX-Intro 16 L08 MovingZonesAnonymous oGn34PeRDОценок пока нет
- Mech GS 2019R2 EN WS13Документ11 страницMech GS 2019R2 EN WS13Laxman DuggiralaОценок пока нет
- Mech-Intro 13.0 WS06.2 PreStrVibДокумент11 страницMech-Intro 13.0 WS06.2 PreStrVibJym GensonОценок пока нет
- Modeling of Complex Systems: Application to Aeronautical DynamicsОт EverandModeling of Complex Systems: Application to Aeronautical DynamicsОценок пока нет
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionОт EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionОценок пока нет
- The Modern Chassis: A Practical Manual of Automotive Chassis and Suspension DesignОт EverandThe Modern Chassis: A Practical Manual of Automotive Chassis and Suspension DesignРейтинг: 3.5 из 5 звезд3.5/5 (3)
- Overview of the S-Series IPS SpecificationsОт EverandOverview of the S-Series IPS SpecificationsОценок пока нет
- Exercise 1: Opening and Saving FilesДокумент5 страницExercise 1: Opening and Saving FilesShaheen S. RatnaniОценок пока нет
- Arabic Letters PDFДокумент2 страницыArabic Letters PDFjunkyjunk4495Оценок пока нет
- HM Tut 1030Документ8 страницHM Tut 1030Shaheen S. RatnaniОценок пока нет
- Axial Fans: Noise Prediction: Th. CarolusДокумент13 страницAxial Fans: Noise Prediction: Th. CarolusShaheen S. RatnaniОценок пока нет
- Working With Panels - HM-1020: Exercise Step 1: in The Translate Panel, Select Nodes From The Graphics AreaДокумент6 страницWorking With Panels - HM-1020: Exercise Step 1: in The Translate Panel, Select Nodes From The Graphics AreaShaheen S. RatnaniОценок пока нет
- Getting Started With Hypermesh - Hm-1000: Title BarДокумент3 страницыGetting Started With Hypermesh - Hm-1000: Title BarShaheen S. RatnaniОценок пока нет
- Lecture 1.0Документ29 страницLecture 1.0Shaheen S. RatnaniОценок пока нет
- Hy-Andritz Centrifugal Pump IsoДокумент6 страницHy-Andritz Centrifugal Pump IsoShaheen S. RatnaniОценок пока нет
- Page Menu: Geom 1D 2D 3D Analysis Tool PostДокумент1 страницаPage Menu: Geom 1D 2D 3D Analysis Tool PostShaheen S. RatnaniОценок пока нет
- Mech Dynamics 14.5 WS08B TransientДокумент22 страницыMech Dynamics 14.5 WS08B TransientShaheen S. RatnaniОценок пока нет
- Mechanical Nonlin 13.0 WS 05A PlasticityДокумент26 страницMechanical Nonlin 13.0 WS 05A PlasticityShaheen S. RatnaniОценок пока нет
- Mechanical-Nonlin 13.0 App7A HyperДокумент31 страницаMechanical-Nonlin 13.0 App7A HyperShaheen S. RatnaniОценок пока нет
- Mech Dynamics 14.5 WS01 IntroДокумент19 страницMech Dynamics 14.5 WS01 IntroShaheen S. RatnaniОценок пока нет
- Prod Docu 14.0 Ans AdvДокумент380 страницProd Docu 14.0 Ans AdvShaheen S. RatnaniОценок пока нет
- Mechanical Nonlin 13.0 WS 05B Localized YieldingДокумент16 страницMechanical Nonlin 13.0 WS 05B Localized YieldingShaheen S. RatnaniОценок пока нет
- 152012.B OptiFloДокумент36 страниц152012.B OptiFloShaheen S. RatnaniОценок пока нет
- Chapter 4 3D Solid Modeling 1Документ18 страницChapter 4 3D Solid Modeling 1Shaheen S. RatnaniОценок пока нет
- Mechanical-Nonlin 13.0 App6B ViscoplasticityДокумент13 страницMechanical-Nonlin 13.0 App6B ViscoplasticityShaheen S. RatnaniОценок пока нет
- Mechanical-Nonlin 13.0 Ch00 IntroДокумент5 страницMechanical-Nonlin 13.0 Ch00 IntroShaheen S. RatnaniОценок пока нет
- Mechanical-Nonlin 13.0 App4A AdvContact (MAPDL)Документ15 страницMechanical-Nonlin 13.0 App4A AdvContact (MAPDL)Shaheen S. RatnaniОценок пока нет
- Mechanical-Nonlin 13.0 App5A ChabocheДокумент27 страницMechanical-Nonlin 13.0 App5A ChabocheShaheen S. RatnaniОценок пока нет
- Mechanical-Nonlin - 13.0 - App6A - Creep Curve Fitting in MAPDLДокумент17 страницMechanical-Nonlin - 13.0 - App6A - Creep Curve Fitting in MAPDLShaheen S. Ratnani100% (2)
- Mechanical Nonlin 13.0 WS 09B SingularitiesДокумент16 страницMechanical Nonlin 13.0 WS 09B SingularitiesShaheen S. RatnaniОценок пока нет
- Mechanical-Nonlin 13.0 App2A Element TechnologyДокумент57 страницMechanical-Nonlin 13.0 App2A Element TechnologyShaheen S. RatnaniОценок пока нет
- Mechanical Nonlin 13.0 WS 09B SingularitiesДокумент16 страницMechanical Nonlin 13.0 WS 09B SingularitiesShaheen S. RatnaniОценок пока нет
- Mechanical Nonlin 13.0 WS 06A CreepДокумент13 страницMechanical Nonlin 13.0 WS 06A CreepShaheen S. Ratnani100% (1)
- Summary of Bill of Quantities ChurchДокумент52 страницыSummary of Bill of Quantities ChurchBiniamОценок пока нет
- Assistant Cook Learner Manual EnglishДокумент152 страницыAssistant Cook Learner Manual EnglishSang Putu Arsana67% (3)
- Illustrating An Experiment, Outcome, Sample Space and EventДокумент9 страницIllustrating An Experiment, Outcome, Sample Space and EventMarielle MunarОценок пока нет
- Pathology of LiverДокумент15 страницPathology of Liverערין גבאריןОценок пока нет
- Continue Practice Exam Test Questions Part 1 of The SeriesДокумент7 страницContinue Practice Exam Test Questions Part 1 of The SeriesKenn Earl Bringino VillanuevaОценок пока нет
- Out PDFДокумент211 страницOut PDFAbraham RojasОценок пока нет
- Drug Addiction Final (Term Paper)Документ15 страницDrug Addiction Final (Term Paper)Dessa Patiga IIОценок пока нет
- Unsuccessful MT-SM DeliveryДокумент2 страницыUnsuccessful MT-SM DeliveryPitam MaitiОценок пока нет
- BrochureДокумент3 страницыBrochureapi-400730798Оценок пока нет
- Injections Quiz 2Документ6 страницInjections Quiz 2Allysa MacalinoОценок пока нет
- 01 托福基础课程Документ57 страниц01 托福基础课程ZhaoОценок пока нет
- SLA in PEGA How To Configue Service Level Agreement - HKRДокумент7 страницSLA in PEGA How To Configue Service Level Agreement - HKRsridhar varmaОценок пока нет
- Assessment of The Genitourinary System: GeneralДокумент2 страницыAssessment of The Genitourinary System: GeneralMaharani UtamiОценок пока нет
- Nadee 3Документ1 страницаNadee 3api-595436597Оценок пока нет
- Delonghi Esam Series Service Info ItalyДокумент10 страницDelonghi Esam Series Service Info ItalyBrko BrkoskiОценок пока нет
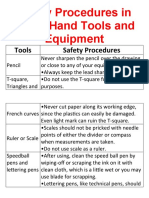
- Safety Procedures in Using Hand Tools and EquipmentДокумент12 страницSafety Procedures in Using Hand Tools and EquipmentJan IcejimenezОценок пока нет
- Peer PressureДокумент13 страницPeer PressuremightymarcОценок пока нет
- Speech On Viewing SkillsДокумент1 страницаSpeech On Viewing SkillsMera Largosa ManlaweОценок пока нет
- Bolt Grade Markings and Strength ChartДокумент2 страницыBolt Grade Markings and Strength ChartGregory GaschteffОценок пока нет
- Case CapsuleДокумент8 страницCase CapsuleLiza BulsaraОценок пока нет
- postedcontentadminuploadsFAQs20for20Organization PDFДокумент10 страницpostedcontentadminuploadsFAQs20for20Organization PDFMohd Adil AliОценок пока нет
- An Evaluation of MGNREGA in SikkimДокумент7 страницAn Evaluation of MGNREGA in SikkimBittu SubbaОценок пока нет
- Sources of Hindu LawДокумент9 страницSources of Hindu LawKrishnaKousikiОценок пока нет
- 7TH Maths F.a-1Документ1 страница7TH Maths F.a-1Marrivada SuryanarayanaОценок пока нет
- Eggermont 2019 ABRДокумент15 страницEggermont 2019 ABRSujeet PathakОценок пока нет
- Acer N300 ManualДокумент50 страницAcer N300 Manualc_formatОценок пока нет
- Cloud Comp PPT 1Документ12 страницCloud Comp PPT 1Kanishk MehtaОценок пока нет
- C2 - Conveyors Diagram: Peso de Faja Longitud de CargaДокумент1 страницаC2 - Conveyors Diagram: Peso de Faja Longitud de CargaIvan CruzОценок пока нет
- Assignment of Chemistry For B.sc-B.ed First Semester Session 2019-2023-1Документ2 страницыAssignment of Chemistry For B.sc-B.ed First Semester Session 2019-2023-1Payal sahaОценок пока нет
- Development Developmental Biology EmbryologyДокумент6 страницDevelopment Developmental Biology EmbryologyBiju ThomasОценок пока нет