Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Comprog ReviewerДокумент11 страницComprog ReviewerRovic VistaОценок пока нет
- Codc - Disconnector (2 State Inputs/ 2 Control Inputs) : 1MRS752350-MUMДокумент22 страницыCodc - Disconnector (2 State Inputs/ 2 Control Inputs) : 1MRS752350-MUMhaichau199Оценок пока нет
- Poetry Analysis Techniques by Cliff NotesДокумент9 страницPoetry Analysis Techniques by Cliff NotesSyed Assar Imam GardeziОценок пока нет
- Essay by Ossama Elkaffash On The New Play by Evald Flisar "Take Me Into Your Hands"Документ28 страницEssay by Ossama Elkaffash On The New Play by Evald Flisar "Take Me Into Your Hands"Slovenian Webclassroom Topic ResourcesОценок пока нет
- Ebook PDF Cognitive Science An Introduction To The Science of The Mind 2nd Edition PDFДокумент41 страницаEbook PDF Cognitive Science An Introduction To The Science of The Mind 2nd Edition PDFdavid.roberts311100% (43)
- Translation Services BrochureДокумент8 страницTranslation Services Brochureapi-251019229Оценок пока нет
- Pengaruh Sistem Reward, Motivasi Dan Keterampilan Komunikasi Terhadap Produktivitas Kerja Agen Asuransi Sequis Life JakartaДокумент10 страницPengaruh Sistem Reward, Motivasi Dan Keterampilan Komunikasi Terhadap Produktivitas Kerja Agen Asuransi Sequis Life Jakartarifqah nur riОценок пока нет
- Plane Figures Mfe 2 2021 2022Документ70 страницPlane Figures Mfe 2 2021 2022Aaliyah Jean BelenОценок пока нет
- Present-Continuous 5202Документ3 страницыPresent-Continuous 5202Raquel Hernandez100% (1)
- A Research Proposal Bab 1 2 3 Original 2.1Документ62 страницыA Research Proposal Bab 1 2 3 Original 2.1Ardi100% (1)
- Surat LamaranДокумент4 страницыSurat LamaranIzdihar DhantyОценок пока нет
- PilotДокумент3 страницыPilotkgaviolaОценок пока нет
- Levels of ClassificationДокумент33 страницыLevels of ClassificationAl Christian YaboОценок пока нет
- Holiday TripДокумент2 страницыHoliday TripAnka AnkaОценок пока нет
- Mengaji Di Kubur 7 Hari 7 MalamДокумент10 страницMengaji Di Kubur 7 Hari 7 MalamIbnu KholdunОценок пока нет
- Proba Scrisa - Model 1Документ2 страницыProba Scrisa - Model 1maria savuОценок пока нет
- Presentation GitangliДокумент41 страницаPresentation GitanglinadihaaОценок пока нет
- SAM Coupe Users ManualДокумент194 страницыSAM Coupe Users ManualcraigmgОценок пока нет
- InfoBasic Programming LanguageДокумент108 страницInfoBasic Programming LanguageSajiloОценок пока нет
- Reading Comprehension 6 PDFДокумент64 страницыReading Comprehension 6 PDFirinachircevОценок пока нет
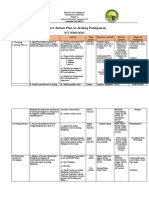
- Action Plan in APДокумент4 страницыAction Plan in APZybyl ZybylОценок пока нет
- The Haiyan Dead: Merlie M. Alunan LeyteДокумент5 страницThe Haiyan Dead: Merlie M. Alunan Leytejhomalyn38% (8)
- Guia 1Документ2 страницыGuia 1GermanSepulvedaBolivarОценок пока нет
- Teaching Music in Elementary Grades: Preliminary Examination SY: 2021-2022 Test 1Документ3 страницыTeaching Music in Elementary Grades: Preliminary Examination SY: 2021-2022 Test 1Saturnino Jr Morales FerolinoОценок пока нет
- New Password B2 CST 3AДокумент1 страницаNew Password B2 CST 3AEwa DudekОценок пока нет
- 1 Functions As Models: 1.1 Four Ways To Represent A FunctionДокумент3 страницы1 Functions As Models: 1.1 Four Ways To Represent A FunctionChristian BaseaОценок пока нет
- Literature Articles: (Samagra Dasa Sahityada Prathama Grantha), Ed. Ehske (H. SДокумент8 страницLiterature Articles: (Samagra Dasa Sahityada Prathama Grantha), Ed. Ehske (H. SJASVEER SОценок пока нет
- SolidWorks Plastics Simulation Training Handout 140527 PDFДокумент6 страницSolidWorks Plastics Simulation Training Handout 140527 PDFnitin chauhanОценок пока нет
- Summary of Experience: Chalakanth ReddyДокумент12 страницSummary of Experience: Chalakanth ReddychalakanthОценок пока нет
- Elementary AlgorithmsДокумент618 страницElementary AlgorithmsAditya Paliwal100% (1)