Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Water Filtration System - Method StatementДокумент7 страницWater Filtration System - Method Statementsunil_v575% (4)
- Piping Latest Aramco QuestionsДокумент2 страницыPiping Latest Aramco Questionschandu666creator0% (1)
- Alien Legacy-Manual PDFДокумент93 страницыAlien Legacy-Manual PDFMark BallingerОценок пока нет
- Water Treatments: Steam Water Cycle TreatmentДокумент2 страницыWater Treatments: Steam Water Cycle TreatmentkjfenОценок пока нет
- Timer Tutorials 555Документ1 страницаTimer Tutorials 555kjfenОценок пока нет
- Temperature Monitoring: FaizanДокумент5 страницTemperature Monitoring: FaizankjfenОценок пока нет
- Degree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarksДокумент10 страницDegree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarkskjfenОценок пока нет
- Selo 1Документ26 страницSelo 1kjfenОценок пока нет
- 74HC193 74HCT193: 17. Contact InformationДокумент2 страницы74HC193 74HCT193: 17. Contact InformationkjfenОценок пока нет
- Timer Tutorials 555Документ1 страницаTimer Tutorials 555kjfenОценок пока нет
- Timer Tutorials 555Документ1 страницаTimer Tutorials 555kjfenОценок пока нет
- Timer Tutorials 555Документ1 страницаTimer Tutorials 555kjfenОценок пока нет
- Timer Tutorials 555Документ1 страницаTimer Tutorials 555kjfenОценок пока нет
- 74HC193 74HCT193: 5. Pinning InformationДокумент2 страницы74HC193 74HCT193: 5. Pinning InformationkjfenОценок пока нет
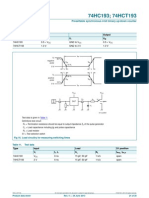
- 74HC193 74HCT193: 10. Dynamic CharacteristicsДокумент2 страницы74HC193 74HCT193: 10. Dynamic CharacteristicskjfenОценок пока нет
- 74HC193 74HCT193: 14. AbbreviationsДокумент2 страницы74HC193 74HCT193: 14. AbbreviationskjfenОценок пока нет
- 74HC193 74HCT193: NXP SemiconductorsДокумент2 страницы74HC193 74HCT193: NXP SemiconductorskjfenОценок пока нет
- 74HC193 74HCT193: NXP SemiconductorsДокумент2 страницы74HC193 74HCT193: NXP SemiconductorskjfenОценок пока нет
- 74HC193 74HCT193: NXP SemiconductorsДокумент2 страницы74HC193 74HCT193: NXP SemiconductorskjfenОценок пока нет
- 74HC193 74HCT193: 13. Package OutlineДокумент2 страницы74HC193 74HCT193: 13. Package OutlinekjfenОценок пока нет
- 74HC193 74HCT193: NXP SemiconductorsДокумент2 страницы74HC193 74HCT193: NXP SemiconductorskjfenОценок пока нет
- 74HC193 74HCT193: NXP SemiconductorsДокумент2 страницы74HC193 74HCT193: NXP SemiconductorskjfenОценок пока нет
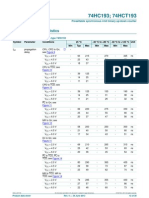
- 74HC193 74HCT193: 9. Static CharacteristicsДокумент2 страницы74HC193 74HCT193: 9. Static CharacteristicskjfenОценок пока нет
- 74HC193 74HCT193: NXP SemiconductorsДокумент2 страницы74HC193 74HCT193: NXP SemiconductorskjfenОценок пока нет
- Physical Dimensions: 14-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300" Wide Package Number N14AДокумент1 страницаPhysical Dimensions: 14-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300" Wide Package Number N14AkjfenОценок пока нет
- Function Tables Logic Diagram: BCD Count Sequence (Note 1) Outputs Q Q Q QДокумент1 страницаFunction Tables Logic Diagram: BCD Count Sequence (Note 1) Outputs Q Q Q QkjfenОценок пока нет
- Ac Switching Characteristics: 5vandtДокумент1 страницаAc Switching Characteristics: 5vandtkjfenОценок пока нет
- 44 A Practical Guide To Geomantic Divination 45 The Presiding GeniusДокумент1 страница44 A Practical Guide To Geomantic Divination 45 The Presiding GeniuskjfenОценок пока нет
- Absolute Maximum Ratings: Symbol Parameter Min Nom Max UnitsДокумент1 страницаAbsolute Maximum Ratings: Symbol Parameter Min Nom Max UnitskjfenОценок пока нет
- Geomantic AstrologyДокумент1 страницаGeomantic AstrologykjfenОценок пока нет
- Certification - Speech Testing - Assistant PartnersДокумент2 страницыCertification - Speech Testing - Assistant PartnersRodrigo Freire BragaОценок пока нет
- KinematicsДокумент33 страницыKinematicsErik MagnoОценок пока нет
- DTH Reviews NewДокумент9 страницDTH Reviews NewPrithi J0% (1)
- HeiДокумент1 страницаHeiJose Nelson Moreno BОценок пока нет
- Mycom TecnicaДокумент21 страницаMycom TecnicaTeuku Mukhriza100% (1)
- A2 Accu-Flo Clamped Metal Pump: Engineering Operation MaintenanceДокумент28 страницA2 Accu-Flo Clamped Metal Pump: Engineering Operation MaintenanceThanh Nghị BùiОценок пока нет
- Partner Colibri II O2010 Euenapen 545196762Документ13 страницPartner Colibri II O2010 Euenapen 545196762Popescu OvidiuОценок пока нет
- Lorentz Ps4000 Manual enДокумент9 страницLorentz Ps4000 Manual encorazto100% (1)
- List of Sanitary and Plumbing ItemsДокумент4 страницыList of Sanitary and Plumbing ItemssumalathaОценок пока нет
- Office Automation & Attendance System Using IoTДокумент4 страницыOffice Automation & Attendance System Using IoTAnonymous kw8Yrp0R5rОценок пока нет
- KX Tde600 FeatureДокумент460 страницKX Tde600 Featureabg121Оценок пока нет
- Cable Ties CatalogДокумент60 страницCable Ties CatalogRvОценок пока нет
- Instruction Manual of EDM MachineДокумент18 страницInstruction Manual of EDM MachineJanak ValakiОценок пока нет
- VW-Audi Airbag Reset Tool User ManualДокумент14 страницVW-Audi Airbag Reset Tool User ManualgermantronikОценок пока нет
- BITP3423 - Special Topic in Software Engineering: IT Architects PerspectiveДокумент17 страницBITP3423 - Special Topic in Software Engineering: IT Architects PerspectiveDee MohdОценок пока нет
- Combined Karcher AR Trouble ShootingДокумент18 страницCombined Karcher AR Trouble ShootingFrancisco Eric CelestinoОценок пока нет
- VSL 2024 Course List and Loan Caps (Students)Документ14 страницVSL 2024 Course List and Loan Caps (Students)ashishkumar777Оценок пока нет
- Tuning SU CarbsДокумент49 страницTuning SU CarbsVictor PetrosckiОценок пока нет
- Overhead Design Manua Section 8 - Cable DataДокумент18 страницOverhead Design Manua Section 8 - Cable DataIVAN TURCOОценок пока нет
- Wärtsilä 20 Product GuideДокумент178 страницWärtsilä 20 Product Guidedaniel adam0% (1)
- Project Management Resume ExampleДокумент2 страницыProject Management Resume ExampleGuino VargasОценок пока нет
- Transformer Design and Optimization A Literature Survey PDFДокумент26 страницTransformer Design and Optimization A Literature Survey PDFRushikesh MaliОценок пока нет
- DWL-G120: Before You BeginДокумент12 страницDWL-G120: Before You BeginMark TeaterОценок пока нет
- 20a-Esp8266 Rtos SDK Programming Guide enДокумент41 страница20a-Esp8266 Rtos SDK Programming Guide enkellisgfОценок пока нет
- Manual de Parts ES16D6Документ36 страницManual de Parts ES16D6Eduardo CortezОценок пока нет
- Digital Electronics Interview Questions PDFДокумент3 страницыDigital Electronics Interview Questions PDFSanjeev100% (2)
- Datalogic Gryphon GM4100 User GuideДокумент52 страницыDatalogic Gryphon GM4100 User Guidebgrabbe92540% (1)