Вам также может понравиться
- A320Neo-IOS Manual Rev0Документ329 страницA320Neo-IOS Manual Rev0Pankaj Bhardwaj100% (2)
- ANSYS Multiphysics CapabilitiesДокумент70 страницANSYS Multiphysics CapabilitiesAniketKulkarniОценок пока нет
- ABB Recloser Brochure 1VAL2601-TG Rev GДокумент32 страницыABB Recloser Brochure 1VAL2601-TG Rev Gyana_harsana100% (1)
- THE3 - BonusДокумент6 страницTHE3 - Bonusdanejoabdallah01Оценок пока нет
- Obstacle Avoidance Based On Fuzzy LogicДокумент5 страницObstacle Avoidance Based On Fuzzy LogicMarcAlomarPayerasОценок пока нет
- Android: Uni-Stroke Touch Gesture Recognition Using $1 Gesture ReconigizerДокумент13 страницAndroid: Uni-Stroke Touch Gesture Recognition Using $1 Gesture Reconigizerpi194043Оценок пока нет
- A Study On Tangent Bug AlgorithmДокумент3 страницыA Study On Tangent Bug AlgorithmkfuScribdОценок пока нет
- Android Touch Gesture Recognition Based On FastDTW AlgoritmДокумент16 страницAndroid Touch Gesture Recognition Based On FastDTW Algoritmpi194043Оценок пока нет
- Fuzzy PDFДокумент27 страницFuzzy PDFjack2812Оценок пока нет
- Indoor Autonomous Robotic Navigation System: RRC, IIIT HyderabadДокумент41 страницаIndoor Autonomous Robotic Navigation System: RRC, IIIT Hyderabadmonica_804238794Оценок пока нет
- Exact Cell Decomposition of Arrangements Used For Path Planning in RoboticsДокумент14 страницExact Cell Decomposition of Arrangements Used For Path Planning in RoboticsAli BabarОценок пока нет
- Mobile Robot Navigation Using A Behavioural StrategyДокумент16 страницMobile Robot Navigation Using A Behavioural StrategyM Taufik FirmansyahОценок пока нет
- Equiangular Navigation Guidance of A Wheeled Mobile Robot With Local Obstacle AvoidanceДокумент6 страницEquiangular Navigation Guidance of A Wheeled Mobile Robot With Local Obstacle Avoidancearyan_iustОценок пока нет
- Implementation of The Adaptive Pure Pursuit Controller: Team 1712Документ19 страницImplementation of The Adaptive Pure Pursuit Controller: Team 1712Chris P. BaconОценок пока нет
- Path Tracking For A Miniature RobotДокумент9 страницPath Tracking For A Miniature RobotDarshan Rai KanungoОценок пока нет
- Robotics ScribdДокумент7 страницRobotics ScribdDato Madilao TimorОценок пока нет
- Line Follower LEGO NXT RobotДокумент10 страницLine Follower LEGO NXT RobotMohammad Johirul IslamОценок пока нет
- Path Following For A Car-Like Mobile Robot Based On Fuzzy-LogicДокумент57 страницPath Following For A Car-Like Mobile Robot Based On Fuzzy-LogicRoberto GonzálezОценок пока нет
- Experimental Setup of ProjectДокумент7 страницExperimental Setup of Projectapi-248119294Оценок пока нет
- Control System Final Review Mapping Robot SimulatorДокумент8 страницControl System Final Review Mapping Robot SimulatorDhruv KapadiaОценок пока нет
- Localization Data Fusion RobotinoДокумент8 страницLocalization Data Fusion RobotinoAlexandre RibeiroОценок пока нет
- 3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartДокумент7 страниц3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartTrương Đức BìnhОценок пока нет
- Midterm ImplementationДокумент4 страницыMidterm Implementationapi-296552281Оценок пока нет
- Mobile Robot Navigation in A Corridor Using Visual OdometryДокумент6 страницMobile Robot Navigation in A Corridor Using Visual OdometryEbit Nur AlfianОценок пока нет
- Robotics Kinematics Dynamics and Applications FinalДокумент13 страницRobotics Kinematics Dynamics and Applications FinalJeff AtuaОценок пока нет
- Assignment Report #4: Obstacle Avoidance AlgorithmДокумент12 страницAssignment Report #4: Obstacle Avoidance AlgorithmAnjali DhobaleОценок пока нет
- AM 8th Sem Solution 17.05.19 in CourseДокумент16 страницAM 8th Sem Solution 17.05.19 in CourseRaj PatelОценок пока нет
- Obstacle Avoidance RobotДокумент40 страницObstacle Avoidance RobotPraveen ReddyОценок пока нет
- Implementation of An Object-Grasping Robot Arm Using Stereo Vision Measurement and Fuzzy ControlДокумент13 страницImplementation of An Object-Grasping Robot Arm Using Stereo Vision Measurement and Fuzzy ControlWikipedia.Оценок пока нет
- Robot Localization and Map Construction Using Sonar Data: Vassilis Varveropoulos The Rossum ProjectДокумент10 страницRobot Localization and Map Construction Using Sonar Data: Vassilis Varveropoulos The Rossum ProjectSafwen SelmiОценок пока нет
- Robotics Assignment Bicycle Model Controller and Path FollowingДокумент2 страницыRobotics Assignment Bicycle Model Controller and Path Followingdsuyash57Оценок пока нет
- VCRA Improved.Документ15 страницVCRA Improved.adwait naikОценок пока нет
- Real-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningДокумент6 страницReal-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningamitsbhatiОценок пока нет
- Computer Graphics: Submitted To: Submitted By: Hardarshan Kaur Chandeep Arora RB1801B34 10804278Документ7 страницComputer Graphics: Submitted To: Submitted By: Hardarshan Kaur Chandeep Arora RB1801B34 10804278chandeeparora12Оценок пока нет
- Imtc RobotNavigation 7594Документ5 страницImtc RobotNavigation 7594flv_91Оценок пока нет
- Presented By: Arz Kumar Satsangi & Vineet VermaДокумент26 страницPresented By: Arz Kumar Satsangi & Vineet VermagarunanarasОценок пока нет
- Emanuele FrontoniДокумент36 страницEmanuele FrontoniDon Vito AndoliniОценок пока нет
- Project Report On Contour DetectionДокумент10 страницProject Report On Contour DetectionRaghav GuptaОценок пока нет
- 32423-Article Text-33991-1-10-20190711Документ7 страниц32423-Article Text-33991-1-10-20190711aliОценок пока нет
- Project - Scarab - A Collector RobotДокумент16 страницProject - Scarab - A Collector RobotLeonardo AlexОценок пока нет
- Self Balancing RobotДокумент14 страницSelf Balancing RobotQoutaeОценок пока нет
- Investigation in Two Wheels Mobile Robot Movement: Stability and Motion PathsДокумент5 страницInvestigation in Two Wheels Mobile Robot Movement: Stability and Motion PathsTimothy FieldsОценок пока нет
- MOBRO Localisation SlidesДокумент106 страницMOBRO Localisation SlidesaustinvishalОценок пока нет
- Robot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesДокумент8 страницRobot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesIulian AlexОценок пока нет
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingДокумент8 страницA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingjayachandradbzОценок пока нет
- Control of A Minisumo Robot - CompressДокумент7 страницControl of A Minisumo Robot - CompressElvio LaoОценок пока нет
- Assignment 2 AnsДокумент22 страницыAssignment 2 AnsOshi KariyawasamОценок пока нет
- Sim.I.am - A Robot SimulatorДокумент27 страницSim.I.am - A Robot Simulatoryashar2500Оценок пока нет
- Mean Shift TrackingДокумент8 страницMean Shift Trackingpi194043Оценок пока нет
- RoboSub 2021 Inst Teknologi Sepuluh Nopember TDRДокумент10 страницRoboSub 2021 Inst Teknologi Sepuluh Nopember TDRKuntjoro PinardiОценок пока нет
- Key Words - Arduino UNO, Motor Shield L293d, Ultrasonic Sensor HC-SR04, DCДокумент17 страницKey Words - Arduino UNO, Motor Shield L293d, Ultrasonic Sensor HC-SR04, DCBîswãjït NãyàkОценок пока нет
- Localization Control of Lego Mobile RobotДокумент6 страницLocalization Control of Lego Mobile RobotPravin BeheraОценок пока нет
- Robotic Arm DesignДокумент15 страницRobotic Arm DesignOreoluwa AdediwuraОценок пока нет
- Assignment 1Документ12 страницAssignment 1Germán Gallardo DuránОценок пока нет
- Priority Scheduling Based Dynamic Path Planning System With Motion FeedbackДокумент5 страницPriority Scheduling Based Dynamic Path Planning System With Motion FeedbackIamIam If IamNotОценок пока нет
- Tangent BugДокумент4 страницыTangent BugervauluОценок пока нет
- Unicycle Model and ControlДокумент27 страницUnicycle Model and ControlmatteoragniОценок пока нет
- Electronically Driven Mobile PlatformДокумент6 страницElectronically Driven Mobile PlatformviduraОценок пока нет
- Implementation of VFHДокумент6 страницImplementation of VFHqwerty uОценок пока нет
- Rover ConstructionДокумент19 страницRover ConstructionNicolas Del BuonoОценок пока нет
- Industrial Robotics: Dr. M V A Raju BahubalendruniДокумент24 страницыIndustrial Robotics: Dr. M V A Raju Bahubalendruniabdul rahmanОценок пока нет
- Hand Gesture Based Wireless RobotДокумент13 страницHand Gesture Based Wireless RobotRaj Pratap SinghОценок пока нет
- Articulated Body Pose Estimation: Unlocking Human Motion in Computer VisionОт EverandArticulated Body Pose Estimation: Unlocking Human Motion in Computer VisionОценок пока нет
- Multi Class Logistic Regression Training and TestingДокумент9 страницMulti Class Logistic Regression Training and Testingpi194043Оценок пока нет
- Compiling Native C/C++ Library For AndroidДокумент3 страницыCompiling Native C/C++ Library For Androidpi194043Оценок пока нет
- Dense Optical Flow Expansion Based On Polynomial Basis ApproximationДокумент12 страницDense Optical Flow Expansion Based On Polynomial Basis Approximationpi194043Оценок пока нет
- Markov Chain Implementation in C++ Using EigenДокумент9 страницMarkov Chain Implementation in C++ Using Eigenpi194043Оценок пока нет
- Implementation of Discrete Hidden Markov Model For Sequence Classification in C++ Using EigenДокумент8 страницImplementation of Discrete Hidden Markov Model For Sequence Classification in C++ Using Eigenpi194043Оценок пока нет
- OpenVision Library Gaussian Mixture Model ImplementationДокумент5 страницOpenVision Library Gaussian Mixture Model Implementationpi194043Оценок пока нет
- Polynomial Approximation of 2D Image Patch - Part 2Документ14 страницPolynomial Approximation of 2D Image Patch - Part 2pi194043Оценок пока нет
- 1D Kernel Density EstimationДокумент9 страниц1D Kernel Density Estimationpi194043Оценок пока нет
- Fast 2D Separable Symmetric/Anti-Symmmetric ConvolutionДокумент7 страницFast 2D Separable Symmetric/Anti-Symmmetric Convolutionpi194043Оценок пока нет
- Mean Shift TrackingДокумент8 страницMean Shift Trackingpi194043Оценок пока нет
- A Path Planning AlgorithmДокумент13 страницA Path Planning Algorithmpi194043100% (1)
- Integral Image For Computation of Mean and VarianceДокумент5 страницIntegral Image For Computation of Mean and Variancepi194043Оценок пока нет
- Quick Sort Algorithm in HaskellДокумент8 страницQuick Sort Algorithm in Haskellpi194043Оценок пока нет
- Algorithms - Inversion Count Using HaskellДокумент6 страницAlgorithms - Inversion Count Using Haskellpi194043Оценок пока нет
- Basic Sorting Algorithms Using Haskell - 1Документ7 страницBasic Sorting Algorithms Using Haskell - 1pi194043Оценок пока нет
- Merge Sort Algorithm Using HaskellДокумент6 страницMerge Sort Algorithm Using Haskellpi194043Оценок пока нет
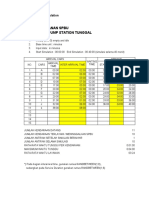
- Simulasi Layanan Spbu Dengan Gas Pump Station Tunggal: Modeling and SimulationДокумент2 страницыSimulasi Layanan Spbu Dengan Gas Pump Station Tunggal: Modeling and SimulationBetta CanduОценок пока нет
- Chapter 8 - Test BankДокумент50 страницChapter 8 - Test Bankjuan100% (1)
- HAT ARE THE Most Common Types OF Information System IN AN OrganizationДокумент5 страницHAT ARE THE Most Common Types OF Information System IN AN OrganizationMayank SharmaОценок пока нет
- What Do Prototypes Prototype?: It Prototypes-We Can Make Better Decisions AboutДокумент16 страницWhat Do Prototypes Prototype?: It Prototypes-We Can Make Better Decisions AboutfedoerigoОценок пока нет
- Blastman Product Catalog g4 EngДокумент50 страницBlastman Product Catalog g4 EngGridbots TechnologiesОценок пока нет
- Kaizen™ Academy: KAIZEN™ Skills and Solutions For All Functions and Business SectorsДокумент17 страницKaizen™ Academy: KAIZEN™ Skills and Solutions For All Functions and Business SectorsJudha PHОценок пока нет
- International Benchmark Study of Advanced Thermal Hydraulic Safety Analysis Codes Against Measurements On IEA-R1 Research ReactorДокумент18 страницInternational Benchmark Study of Advanced Thermal Hydraulic Safety Analysis Codes Against Measurements On IEA-R1 Research ReactorBambang RiyonoОценок пока нет
- The Road To Digital Success in Pharma - McKinsey & CompanyДокумент10 страницThe Road To Digital Success in Pharma - McKinsey & CompanyharshalОценок пока нет
- Ch4.Fault SimulationДокумент68 страницCh4.Fault Simulationxinxiang365Оценок пока нет
- Simulation and Visualization of Dynamic Systems Using Matlab, Simulink, Simulink 3D Animation, and SolidworksДокумент11 страницSimulation and Visualization of Dynamic Systems Using Matlab, Simulink, Simulink 3D Animation, and SolidworkscointoinОценок пока нет
- Cyber SecurityДокумент6 страницCyber SecurityNidhi ShahОценок пока нет
- Evaluation Method of Energy Consumption in Logistic Warehouse Systems (2015)Документ166 страницEvaluation Method of Energy Consumption in Logistic Warehouse Systems (2015)Douglas RojasОценок пока нет
- Sap s4 HanaДокумент2 страницыSap s4 HanasharadcsinghОценок пока нет
- 2009 Galster - What Is NeighbourhoodДокумент21 страница2009 Galster - What Is NeighbourhoodVeronica TapiaОценок пока нет
- T & D Unit-4Документ26 страницT & D Unit-4rasanooryОценок пока нет
- Dev Ops AdoptingДокумент8 страницDev Ops AdoptingJuanito PapasОценок пока нет
- PV Cell ModelingДокумент12 страницPV Cell Modelingtran duyОценок пока нет
- AC-0098 Accreditation Cancellation RequestДокумент5 страницAC-0098 Accreditation Cancellation RequestairlinemembershipОценок пока нет
- ARL ThesisДокумент128 страницARL ThesisAnonymous x6EALQbJОценок пока нет
- OpenFresco Example Manual 2.6 XPCTargetДокумент17 страницOpenFresco Example Manual 2.6 XPCTargetMassimo LatourОценок пока нет
- Application of New HEC RAS Version 5 For 1D Hydrodynamic FoodДокумент12 страницApplication of New HEC RAS Version 5 For 1D Hydrodynamic FoodNesrine NasriОценок пока нет
- AWS90 Structural Nonlin Ch03 ContactДокумент78 страницAWS90 Structural Nonlin Ch03 ContactRaki Rock100% (2)
- Desktop Engineering - 2012-11Документ52 страницыDesktop Engineering - 2012-11Бушинкин ВладиславОценок пока нет
- 3HAC080435-001 AM PickMaster Twin 2.1.1-En - Rev.2.1.1Документ518 страниц3HAC080435-001 AM PickMaster Twin 2.1.1-En - Rev.2.1.1Poom YoosornОценок пока нет
- Construction Engineering and Project Management (CEPM) : Gabriel B. Dadi, PH.D., P.E., LEED AP 151C OHRДокумент34 страницыConstruction Engineering and Project Management (CEPM) : Gabriel B. Dadi, PH.D., P.E., LEED AP 151C OHRLaxman YermalОценок пока нет
- Feature DebottleneckingДокумент6 страницFeature Debottleneckingsri9987Оценок пока нет
- Model Validation For Wind Turbine GeneratorДокумент14 страницModel Validation For Wind Turbine GeneratorsuljiciОценок пока нет