Вам также может понравиться
- Carry Out Safety Assessment at Work AreaДокумент2 страницыCarry Out Safety Assessment at Work AreaPatricia KCОценок пока нет
- Digital Modulation Signal of Data UsingДокумент17 страницDigital Modulation Signal of Data UsingPatricia KCОценок пока нет
- Jadual Pmbahgian WIM AMALIДокумент2 страницыJadual Pmbahgian WIM AMALIPatricia KCОценок пока нет
- Standard Practice Hair Dresser - 1Документ29 страницStandard Practice Hair Dresser - 1Patricia KCОценок пока нет
- MOSFET - The Metal Oxide FETДокумент1 страницаMOSFET - The Metal Oxide FETPatricia KCОценок пока нет
- Conclusion LabДокумент3 страницыConclusion LabPatricia KCОценок пока нет
- Worker Injuried by Forklift AccidentДокумент1 страницаWorker Injuried by Forklift AccidentPatricia KCОценок пока нет
- Minutes Meeting of Integrated Design Project 1 (BEE22002) : Item Particulars Action byДокумент2 страницыMinutes Meeting of Integrated Design Project 1 (BEE22002) : Item Particulars Action byPatricia KCОценок пока нет
- Lab 4 CPU InstructionsДокумент16 страницLab 4 CPU InstructionsPatricia KC0% (1)
- Universiti Tun Hussein Onn Malaysia: This Paper Consists of Eight PagesДокумент9 страницUniversiti Tun Hussein Onn Malaysia: This Paper Consists of Eight PagesPatricia KCОценок пока нет
- Flowchart MtorДокумент1 страницаFlowchart MtorPatricia KCОценок пока нет
- LRL - ) L: :CRJ Acr) ZC Ocz) O (EДокумент1 страницаLRL - ) L: :CRJ Acr) ZC Ocz) O (EPatricia KCОценок пока нет
- Electronic Engineering Laboratory IV BEE31101 Instruction SheetДокумент12 страницElectronic Engineering Laboratory IV BEE31101 Instruction SheetPatricia KCОценок пока нет
- Multiple AccessДокумент12 страницMultiple AccessPatricia KCОценок пока нет
- Table of ContentДокумент1 страницаTable of ContentPatricia KCОценок пока нет
- Bee 3223Документ8 страницBee 3223Patricia KCОценок пока нет
- Electrical Accident Risks in Electrical WorkДокумент181 страницаElectrical Accident Risks in Electrical WorkPatricia KCОценок пока нет
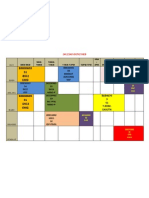
- BEB30603 S1 Bsc2 EMG: BEB30503 S4 BKMKDT (Anjung) DSP BEC30403 S3 Bke6 Miro-P BEC30403 S3 Bk-Fpt6 Miro-PДокумент1 страницаBEB30603 S1 Bsc2 EMG: BEB30503 S4 BKMKDT (Anjung) DSP BEC30403 S3 Bke6 Miro-P BEC30403 S3 Bk-Fpt6 Miro-PPatricia KCОценок пока нет
- Page 0006 PDFДокумент1 страницаPage 0006 PDFPatricia KCОценок пока нет
- BEF22903 Tutorial 1Документ2 страницыBEF22903 Tutorial 1Patricia KC0% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Auditing in The Cis Environment ReviewerДокумент3 страницыAuditing in The Cis Environment ReviewerEvita Faith LeongОценок пока нет
- Shinwa Protocol v11Документ7 страницShinwa Protocol v11hariesha5722Оценок пока нет
- Samsung Semiconductor Inc Mmcre64gfmpp Mva C4158623a2Документ39 страницSamsung Semiconductor Inc Mmcre64gfmpp Mva C4158623a2reb2009Оценок пока нет
- LAN Local Area Network Interview Questions and Answers 535Документ7 страницLAN Local Area Network Interview Questions and Answers 535Yaar Muhammad khalid ilhaqОценок пока нет
- Installation Guide: ARCNET® Network Interface Modules For PC/XT/AT (ISA) Bus ComputersДокумент12 страницInstallation Guide: ARCNET® Network Interface Modules For PC/XT/AT (ISA) Bus ComputersaustintanОценок пока нет
- LM068 DatasheetДокумент9 страницLM068 Datasheetpabilito.alejandrinoОценок пока нет
- E78-470LN22S Usermanual EN v1.4Документ28 страницE78-470LN22S Usermanual EN v1.4navivoc270Оценок пока нет
- C File DialogДокумент9 страницC File DialogDaniel HatfieldОценок пока нет
- Module-2-Introduction To HDFS and ToolsДокумент38 страницModule-2-Introduction To HDFS and ToolsshreyaОценок пока нет
- Real Time Communications Over UDP Protocol - CodeProjectДокумент12 страницReal Time Communications Over UDP Protocol - CodeProjectTauseef AhmadОценок пока нет
- 11 Modbus ProtocolДокумент22 страницы11 Modbus ProtocolYohan Krisnandi PutraОценок пока нет
- Unit 3Документ36 страницUnit 3PrasannaKumar KaraNamОценок пока нет
- Seminar LabДокумент26 страницSeminar LabSaumya SinghОценок пока нет
- Script QuizizzДокумент4 страницыScript QuizizzRuslan AjiОценок пока нет
- Cognos Best PracticesДокумент30 страницCognos Best PracticesNidhi VermaОценок пока нет
- Performance Tweaks and Tools For LinuxДокумент113 страницPerformance Tweaks and Tools For Linuxice799100% (2)
- 05-MPLS OAM ConfigurationДокумент21 страница05-MPLS OAM ConfigurationnazloenОценок пока нет
- 70 433Документ48 страниц70 433oscaretteОценок пока нет
- Lab 4 - Session - CookiesДокумент7 страницLab 4 - Session - CookiesGudako Chaotic-EvilОценок пока нет
- Disaster Recovery Using VMware Vsphere Replication and Vcenter Site Recovery Manager Sample ChapterДокумент41 страницаDisaster Recovery Using VMware Vsphere Replication and Vcenter Site Recovery Manager Sample ChapterPackt PublishingОценок пока нет
- VB Question Paper SolvedДокумент7 страницVB Question Paper Solvedlalitha77% (22)
- JRTДокумент2 страницыJRTalbertoОценок пока нет
- Publisher HelpДокумент82 страницыPublisher HelpDino JahicОценок пока нет
- MMX Technology For PentiumДокумент13 страницMMX Technology For Pentiumapi-3749180Оценок пока нет
- Tally Erp 9.0 Material Control Centre in Tally Erp 9.0Документ27 страницTally Erp 9.0 Material Control Centre in Tally Erp 9.0Raghavendra yadav KMОценок пока нет
- Book - DRAM Circuit Design A Tutorial by Brent Keeth R Jacob Baker (Z-LibДокумент213 страницBook - DRAM Circuit Design A Tutorial by Brent Keeth R Jacob Baker (Z-LibVăn CôngОценок пока нет
- CP R80.30 GA Installation and Upgrade Guide PDFДокумент636 страницCP R80.30 GA Installation and Upgrade Guide PDFAnubhaw KumarОценок пока нет
- Explain How Files and Databases Are Used in OrganizationsДокумент5 страницExplain How Files and Databases Are Used in OrganizationsTyrick MinottОценок пока нет
- PLSQL 7 4 PracticeДокумент3 страницыPLSQL 7 4 PracticeAlfonso TorresОценок пока нет
- 5 DB erToRelДокумент39 страниц5 DB erToRelDickОценок пока нет