Вам также может понравиться
- Manifold and Differential FormsДокумент153 страницыManifold and Differential FormsBharat Mahajan50% (2)
- Matrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")От EverandMatrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Рейтинг: 3 из 5 звезд3/5 (4)
- Guidelines For TV Broadcast Script Writing and News CastingДокумент3 страницыGuidelines For TV Broadcast Script Writing and News CastingAngel D. Liwanag0% (1)
- Proposal For Funding of Computer Programme (NASS)Документ6 страницProposal For Funding of Computer Programme (NASS)Foster Boateng67% (3)
- Shore Activities and Detachments Under The Command of Secretary of Navy and Chief of Naval OperationsДокумент53 страницыShore Activities and Detachments Under The Command of Secretary of Navy and Chief of Naval OperationskarakogluОценок пока нет
- 14 - Habeas Corpus PetitionДокумент4 страницы14 - Habeas Corpus PetitionJalaj AgarwalОценок пока нет
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"От EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Рейтинг: 2.5 из 5 звезд2.5/5 (2)
- Expansion Analysis of Offshore PipelineДокумент25 страницExpansion Analysis of Offshore PipelineSAUGAT DUTTAОценок пока нет
- The Quine-McCluskey MethodДокумент15 страницThe Quine-McCluskey MethodJohn100% (1)
- Labview GuideДокумент8 страницLabview GuideRameezОценок пока нет
- Kalman DecompositionДокумент13 страницKalman DecompositionOla SkeikОценок пока нет
- SimplexДокумент15 страницSimplexazertyKAIОценок пока нет
- Linear Algebra Lecture 5finalДокумент7 страницLinear Algebra Lecture 5finalmacavellyОценок пока нет
- Ee 5307 HomeworksДокумент15 страницEe 5307 HomeworksManoj KumarОценок пока нет
- Tutorial 6 - Introduction To Matrices - 2010Документ10 страницTutorial 6 - Introduction To Matrices - 2010Omar LSОценок пока нет
- Lab IV: Solving A System of Linear Equations and Kirchoff 'S LawsДокумент5 страницLab IV: Solving A System of Linear Equations and Kirchoff 'S LawsSanjanaLakshmiОценок пока нет
- A A A A A A: Solution of Linear SystemДокумент11 страницA A A A A A: Solution of Linear SystemAsif KarimОценок пока нет
- Linear Algebra Matrix Operations and PropertiesДокумент13 страницLinear Algebra Matrix Operations and PropertiesArnon BrunoОценок пока нет
- Solving Systems of Linear EquationsДокумент9 страницSolving Systems of Linear EquationsGebrekirstos TsegayОценок пока нет
- State feedback controller design for eigenvalue placementДокумент11 страницState feedback controller design for eigenvalue placementGalih NugrahaОценок пока нет
- State Variables Analysis IIДокумент22 страницыState Variables Analysis IINoor Ahmed ChandioОценок пока нет
- 2.2 Properties of Determinants: 2.2.1 Determinants and Elementary Row OperationsДокумент9 страниц2.2 Properties of Determinants: 2.2.1 Determinants and Elementary Row Operationsshashin17Оценок пока нет
- Control System Design in State Space (Ch. 10, P 722) : Pole (Eigenvalue) Placement. (P 723)Документ7 страницControl System Design in State Space (Ch. 10, P 722) : Pole (Eigenvalue) Placement. (P 723)Abdullah Abu LehyahОценок пока нет
- Álgebra Linear: Matrizes E Operações Com MatrizesДокумент14 страницÁlgebra Linear: Matrizes E Operações Com Matrizesanon_697232223Оценок пока нет
- BGE 2113/chapter 3: Systems of Linear EquationsДокумент12 страницBGE 2113/chapter 3: Systems of Linear Equationsst6575dОценок пока нет
- 1 System of Linear Equations and Their Solutions: An Example For MotivationДокумент5 страниц1 System of Linear Equations and Their Solutions: An Example For MotivationMehul JainОценок пока нет
- Numerical Analysis-Solving Linear SystemsДокумент23 страницыNumerical Analysis-Solving Linear SystemsMohammad OzairОценок пока нет
- Chapter 10 Matrices and Determinants: AlgebraДокумент15 страницChapter 10 Matrices and Determinants: AlgebraDinesh KumarОценок пока нет
- LogicДокумент100 страницLogicaktherrameezОценок пока нет
- LU Decomposition Matrix InversionДокумент34 страницыLU Decomposition Matrix InversionAmaniОценок пока нет
- Rank Matrix Work BookДокумент8 страницRank Matrix Work BookМаринковић АлександарОценок пока нет
- Linear Alg Equ2Документ8 страницLinear Alg Equ2leo9211_ashОценок пока нет
- SCI2110 System & Control Theory: State Variables)Документ12 страницSCI2110 System & Control Theory: State Variables)Wilber PinaresОценок пока нет
- Introduction To Matrix AlgebraДокумент7 страницIntroduction To Matrix AlgebraKimDungTranОценок пока нет
- Section 1.8 Gaussian Elimination With PivotingДокумент8 страницSection 1.8 Gaussian Elimination With PivotingAnshul GuptaОценок пока нет
- VAR Stability AnalysisДокумент11 страницVAR Stability AnalysisCristian CernegaОценок пока нет
- Linear Algebra SolutionsДокумент22 страницыLinear Algebra Solutionsjaspreet_xps0% (1)
- Latex Test PDF RenderingДокумент4 страницыLatex Test PDF RenderinglordpersonОценок пока нет
- 2 Basis Art RevДокумент10 страниц2 Basis Art RevNica AlexandruОценок пока нет
- Systems of Linear Equations and Matrices: Shirley HuangДокумент51 страницаSystems of Linear Equations and Matrices: Shirley HuangShu RunОценок пока нет
- Quine Mccluskey HandoutДокумент15 страницQuine Mccluskey HandoutLeoОценок пока нет
- Cannon Strassen DNS AlgorithmДокумент10 страницCannon Strassen DNS AlgorithmKeshav BhutaniОценок пока нет
- Numerical Methods For EngineersДокумент17 страницNumerical Methods For EngineersMahir MahmoodОценок пока нет
- EXP (5) - State Variable Feedback DesignДокумент7 страницEXP (5) - State Variable Feedback Designبدون اسمОценок пока нет
- Proof of The Cofactor Expansion Theorem 1Документ13 страницProof of The Cofactor Expansion Theorem 1pasomagaОценок пока нет
- Matlab 15Документ8 страницMatlab 15Robert RoigОценок пока нет
- Chiang - Chapter 4Документ14 страницChiang - Chapter 4straffor100% (1)
- Block Ciphers and The Advanced Encryption StandardДокумент46 страницBlock Ciphers and The Advanced Encryption Standardmilan_manwar6202Оценок пока нет
- P1 Engineering Computation: David MurrayДокумент46 страницP1 Engineering Computation: David MurrayStelios KondosОценок пока нет
- CO1 Material MFEДокумент24 страницыCO1 Material MFESowjanya KolisettyОценок пока нет
- Gauss Elimination MethodДокумент15 страницGauss Elimination MethodAditya AgrawalОценок пока нет
- Matrix Matrix: Gauss Gauss - Jordan Elimination Jordan Elimination Is AДокумент5 страницMatrix Matrix: Gauss Gauss - Jordan Elimination Jordan Elimination Is ACristiana TemelieОценок пока нет
- Assumption C.5 States That The Values of The Disturbance Term in The Observations in The Sample Are Generated Independently of Each OtherДокумент129 страницAssumption C.5 States That The Values of The Disturbance Term in The Observations in The Sample Are Generated Independently of Each OtherEddie BarrionuevoОценок пока нет
- StabilityДокумент8 страницStabilityGianco VillarrealОценок пока нет
- 1 Methods For Solving Systems of Linear EquationsДокумент21 страница1 Methods For Solving Systems of Linear EquationsNaimun SirajОценок пока нет
- Iterative Methods For Solving Linear SystemsДокумент32 страницыIterative Methods For Solving Linear SystemsNapsterОценок пока нет
- State EstimationДокумент34 страницыState EstimationFengxing ZhuОценок пока нет
- AssignmentsДокумент22 страницыAssignmentsanshОценок пока нет
- Definition of Pole PlacementДокумент7 страницDefinition of Pole PlacementKrishna BharadwajОценок пока нет
- Cpe-310B Engineering Computation and Simulation: Solving Sets of EquationsДокумент46 страницCpe-310B Engineering Computation and Simulation: Solving Sets of Equationsali ahmedОценок пока нет
- Matlab Basics Tutorial: Electrical and Electronic Engineering & Electrical and Communication Engineering StudentsДокумент23 страницыMatlab Basics Tutorial: Electrical and Electronic Engineering & Electrical and Communication Engineering StudentssushantnirwanОценок пока нет
- Matrices, Determinants & Linear SystemsДокумент30 страницMatrices, Determinants & Linear SystemssilviubogaОценок пока нет
- Gauss Jordan EliminationДокумент7 страницGauss Jordan Eliminationfamo82Оценок пока нет
- Systems Toolkit TutorialДокумент754 страницыSystems Toolkit TutorialBharat MahajanОценок пока нет
- Second Order Solution of Artificial Satellite Theory With DragДокумент16 страницSecond Order Solution of Artificial Satellite Theory With DragBharat MahajanОценок пока нет
- Uncooperative Maneuvering RSO TrackingДокумент10 страницUncooperative Maneuvering RSO TrackingBharat MahajanОценок пока нет
- Direct and Indirect Approaches For Solving Optimal Control Problems in MATLABДокумент13 страницDirect and Indirect Approaches For Solving Optimal Control Problems in MATLABBharat MahajanОценок пока нет
- Canonical Transformations Depending Upon A ParameterДокумент19 страницCanonical Transformations Depending Upon A ParameterBharat MahajanОценок пока нет
- Small Eccentricities or Inclinations in The Brouwer Theory of The Artificial SatelliteДокумент4 страницыSmall Eccentricities or Inclinations in The Brouwer Theory of The Artificial SatelliteBharat MahajanОценок пока нет
- LQG-LQR Controller DesignДокумент37 страницLQG-LQR Controller Designapi-3698538100% (2)
- Lyapunov ControlДокумент3 страницыLyapunov ControlBharat MahajanОценок пока нет
- Expansion Fomulae in Canonical TransformationsДокумент10 страницExpansion Fomulae in Canonical TransformationsBharat MahajanОценок пока нет
- Rockets TheoryДокумент21 страницаRockets TheoryRajesh DeyОценок пока нет
- 18.1 Reentry Dynamics of Lifting VehiclesДокумент11 страниц18.1 Reentry Dynamics of Lifting VehiclesBharat MahajanОценок пока нет
- Periodic Orbits - MoultonДокумент548 страницPeriodic Orbits - MoultonBharat MahajanОценок пока нет
- Periodic Orbits - MoultonДокумент548 страницPeriodic Orbits - MoultonBharat MahajanОценок пока нет
- The Great Idea of Brook TaylorДокумент7 страницThe Great Idea of Brook TaylorGeorge Mpantes mathematics teacherОценок пока нет
- New Titles List 2014, Issue 1Документ52 страницыNew Titles List 2014, Issue 1Worldwide Books CorporationОценок пока нет
- Daily Lesson Plan: Week DAY Date Class Time SubjectДокумент3 страницыDaily Lesson Plan: Week DAY Date Class Time SubjectHasanah HassanОценок пока нет
- Ass 3 MGT206 11.9.2020Документ2 страницыAss 3 MGT206 11.9.2020Ashiqur RahmanОценок пока нет
- Family Health Nursing Process Part 2Документ23 страницыFamily Health Nursing Process Part 2Fatima Ysabelle Marie RuizОценок пока нет
- Elements of Service-Oriented Architecture: B. RamamurthyДокумент15 страницElements of Service-Oriented Architecture: B. RamamurthySaileshan SubhakaranОценок пока нет
- Ardipithecus Ramidus Is A Hominin Species Dating To Between 4.5 and 4.2 Million Years AgoДокумент5 страницArdipithecus Ramidus Is A Hominin Species Dating To Between 4.5 and 4.2 Million Years AgoBianca IrimieОценок пока нет
- Bhavartha Ratnakara: ReferencesДокумент2 страницыBhavartha Ratnakara: ReferencescrppypolОценок пока нет
- p240 MemristorДокумент5 страницp240 MemristorGopi ChannagiriОценок пока нет
- James A. Mcnamara JR.: An Interview WithДокумент22 страницыJames A. Mcnamara JR.: An Interview WithMiguel candelaОценок пока нет
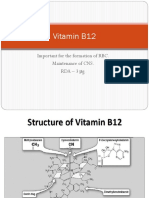
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceДокумент19 страницVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathОценок пока нет
- Lesson 6. TNCTДокумент32 страницыLesson 6. TNCTEsther EdaniolОценок пока нет
- 1st PU Chemistry Test Sep 2014 PDFДокумент1 страница1st PU Chemistry Test Sep 2014 PDFPrasad C M86% (7)
- Rak Single DentureДокумент48 страницRak Single Denturerakes0Оценок пока нет
- Edwards 1999 Emotion DiscourseДокумент22 страницыEdwards 1999 Emotion DiscourseRebeca CenaОценок пока нет
- 04-DDD.Assignment 2 frontsheet 2018-2019-đã chuyển đổi PDFДокумент21 страница04-DDD.Assignment 2 frontsheet 2018-2019-đã chuyển đổi PDFl1111c1anh-5Оценок пока нет
- Subarachnoid Cisterns & Cerebrospinal FluidДокумент41 страницаSubarachnoid Cisterns & Cerebrospinal Fluidharjoth395Оценок пока нет
- Problem Set 12Документ5 страницProblem Set 12Francis Philippe Cruzana CariñoОценок пока нет
- Problems of Education in The 21st Century, Vol. 78, No. 4, 2020Документ199 страницProblems of Education in The 21st Century, Vol. 78, No. 4, 2020Scientia Socialis, Ltd.Оценок пока нет
- Case Problems For Management ScienceДокумент11 страницCase Problems For Management ScienceMargarita AtanacioОценок пока нет
- Compiler Design Lab ManualДокумент24 страницыCompiler Design Lab ManualAbhi Kamate29% (7)
- Leibniz Integral Rule - WikipediaДокумент70 страницLeibniz Integral Rule - WikipediaMannu Bhattacharya100% (1)
- Senator Frank R Lautenberg 003Документ356 страницSenator Frank R Lautenberg 003Joey WilliamsОценок пока нет
- Validated UHPLC-MS - MS Method For Quantification of Doxycycline in Abdominal Aortic Aneurysm PatientsДокумент14 страницValidated UHPLC-MS - MS Method For Quantification of Doxycycline in Abdominal Aortic Aneurysm PatientsAkhmad ArdiansyahОценок пока нет
- Grecian Urn PaperДокумент2 страницыGrecian Urn PaperrhesajanubasОценок пока нет