Вам также может понравиться
- Flanagan Industrial TestsДокумент1 страницаFlanagan Industrial TestsIsrael Alvarez100% (2)
- PhychemДокумент10 страницPhychemMinette PacisОценок пока нет
- BA 1040 Seminar 2 2014 - 2015Документ10 страницBA 1040 Seminar 2 2014 - 2015S.L.L.CОценок пока нет
- Calculus Ii: Unit 4: Triple IntegralsДокумент53 страницыCalculus Ii: Unit 4: Triple Integralsbklumos27Оценок пока нет
- Soln Final Math154 2010Документ5 страницSoln Final Math154 2010yasemin güneytepeОценок пока нет
- Leibniz RuleДокумент6 страницLeibniz RulePETERОценок пока нет
- ILATEДокумент1 страницаILATETrent WarrickОценок пока нет
- Triple Integrals (Where Limits Are Given)Документ11 страницTriple Integrals (Where Limits Are Given)Kalash RanaОценок пока нет
- Chapter 07Документ66 страницChapter 07LuisellysОценок пока нет
- D Integral 1Документ5 страницD Integral 1xzОценок пока нет
- Formula SheetДокумент4 страницыFormula Sheetkidopit906Оценок пока нет
- 0.1 Triple Integrals, Volumes and CentroidsДокумент8 страниц0.1 Triple Integrals, Volumes and CentroidsyohannesОценок пока нет
- Cable Structures: - Cables Can Withstand Only Tensile Internal Forces: No Internal Moments or ShearДокумент4 страницыCable Structures: - Cables Can Withstand Only Tensile Internal Forces: No Internal Moments or Shearlibrian_30005821Оценок пока нет
- LatexДокумент5 страницLatexbbiplab023Оценок пока нет
- Aod Iit NotesДокумент33 страницыAod Iit NotesRohit KumarОценок пока нет
- 0.1 Actual readable stuff: δz δx δz δx δz δy 0 0 0Документ2 страницы0.1 Actual readable stuff: δz δx δz δx δz δy 0 0 0Kenji NakagawaОценок пока нет
- Y GT2 A Lec 04 Triple Int 1415Документ14 страницY GT2 A Lec 04 Triple Int 1415Bell PhamОценок пока нет
- Lecture 3 DoneДокумент9 страницLecture 3 DoneSatyam ChoudharyОценок пока нет
- Tutorial 1 SolutionsДокумент4 страницыTutorial 1 SolutionsAkshay NarasimhaОценок пока нет
- Homework 2Документ4 страницыHomework 2Abegail LorillaОценок пока нет
- DifferentiationДокумент2 страницыDifferentiationJordan BelfortОценок пока нет
- DifferentiationДокумент2 страницыDifferentiationJohn Wayne QuiahОценок пока нет
- DifferentiationДокумент2 страницыDifferentiationJohn Wayne QuiahОценок пока нет
- DifferentiationДокумент2 страницыDifferentiationJordan BelfortОценок пока нет
- SeparationOfVariables CartesianДокумент8 страницSeparationOfVariables CartesianSabriОценок пока нет
- F18CD1 Tutorial 8 Solutions: U V U VДокумент5 страницF18CD1 Tutorial 8 Solutions: U V U VNicholas ThamОценок пока нет
- Final Practice SolДокумент14 страницFinal Practice Solabdalwaheed078Оценок пока нет
- Aerodynamics Notes Week 2Документ10 страницAerodynamics Notes Week 2HenryNОценок пока нет
- Differential Equation of The Elastic CurveДокумент6 страницDifferential Equation of The Elastic CurveJithin D MathewОценок пока нет
- 2019 8N Differentiation2Документ12 страниц2019 8N Differentiation2加卡内-张进哲Оценок пока нет
- Aod (TN)Документ33 страницыAod (TN)Raju SinghОценок пока нет
- Department of Mathematics Manipal Institute of Technology, ManipalДокумент2 страницыDepartment of Mathematics Manipal Institute of Technology, Manipalsaptarshi hoom choudhuryОценок пока нет
- Griffiths ED4 e CH 1 P 35Документ2 страницыGriffiths ED4 e CH 1 P 35Neha AzizОценок пока нет
- Maxwell's Equations. Electromagnetic WavesДокумент15 страницMaxwell's Equations. Electromagnetic WavesPrasanth KumarОценок пока нет
- MATH3023 Formula SheetДокумент3 страницыMATH3023 Formula SheetMax ShervingtonОценок пока нет
- 3 Methods To Differentiate Term InsuranceДокумент2 страницы3 Methods To Differentiate Term InsurancehanОценок пока нет
- ChernSimonEfton PDFДокумент5 страницChernSimonEfton PDFZRichard61Оценок пока нет
- 2 Elimination of Arbitrary ConstantsДокумент9 страниц2 Elimination of Arbitrary ConstantsChristine SalamatОценок пока нет
- Integration by Parts: Harvey Mudd College Math TutorialДокумент3 страницыIntegration by Parts: Harvey Mudd College Math TutorialameyaapteОценок пока нет
- Unit-II: Numerical Methods-II: Numerical Solution of Simultaneous First Order Differential EquationsДокумент66 страницUnit-II: Numerical Methods-II: Numerical Solution of Simultaneous First Order Differential Equationsaero designОценок пока нет
- Bars Subjected To Axial LoadsДокумент7 страницBars Subjected To Axial LoadsFredy Apaza QuispeОценок пока нет
- Arfken MMCH 9 S 2 e 1Документ1 страницаArfken MMCH 9 S 2 e 1aleenanoorniaziОценок пока нет
- Differential Equations: Homogeneous DEДокумент3 страницыDifferential Equations: Homogeneous DEbalajiОценок пока нет
- Triple Int16 7Документ9 страницTriple Int16 7Nick CeccioОценок пока нет
- Arfken MMCH 9 S 2 e 4Документ1 страницаArfken MMCH 9 S 2 e 4Alcides LucasОценок пока нет
- Solutions & Hint To HW6Документ5 страницSolutions & Hint To HW6KensleyTsangОценок пока нет
- Partial DerivativesДокумент2 страницыPartial DerivativesCC CristianОценок пока нет
- Partial DerivativesДокумент2 страницыPartial Derivativesmark dave villasencioОценок пока нет
- 2019 8N DifferentiationДокумент12 страниц2019 8N DifferentiationmitoОценок пока нет
- Derivative Integral Formula Sheet MATH 2413 2414 2417 2419Документ2 страницыDerivative Integral Formula Sheet MATH 2413 2414 2417 2419Shivani SharmaОценок пока нет
- RulesДокумент1 страницаRulesBil's Top 5Оценок пока нет
- Calculus 2 Study Guide Chapter 6Документ5 страницCalculus 2 Study Guide Chapter 6guitaristddjОценок пока нет
- BC W3 - Differential EquationДокумент10 страницBC W3 - Differential EquationVictor CajayonОценок пока нет
- GreenДокумент7 страницGreenDuà Zàhrä Rìzvî100% (1)
- Differential Equations - Review: Engtech 2ma3 Lecture Notes ReviewДокумент4 страницыDifferential Equations - Review: Engtech 2ma3 Lecture Notes ReviewmohammadОценок пока нет
- Ch2 SolnДокумент3 страницыCh2 SolnAlexusCameroОценок пока нет
- Euler-Bernoulli Bending Theory (Pure Bending Moment) ψ z: dw u z dxДокумент13 страницEuler-Bernoulli Bending Theory (Pure Bending Moment) ψ z: dw u z dxeulerintegralОценок пока нет
- Homework 2 Vector Algebra and CalculusДокумент2 страницыHomework 2 Vector Algebra and CalculusSwathi BDОценок пока нет
- Maximum and Minimum Values of Functions y F (X)Документ22 страницыMaximum and Minimum Values of Functions y F (X)Wasik BillahОценок пока нет
- 2 Digression: Differential Calculus On R: N N 1 X X DX X DX 1+x DX 2 XДокумент4 страницы2 Digression: Differential Calculus On R: N N 1 X X DX X DX 1+x DX 2 XGag PafОценок пока нет
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27От EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Оценок пока нет
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОт EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОценок пока нет
- Propensity Toward Indebtednes - Evidence From MalaysiaДокумент13 страницPropensity Toward Indebtednes - Evidence From MalaysiaWihelmina DeaОценок пока нет
- Chapter 2/number 61/problem Set 2.3 Ferris Wheel in 1897, A Ferris Wheel Was Built in Vienna That Still Stands Today. It Is Named TheДокумент3 страницыChapter 2/number 61/problem Set 2.3 Ferris Wheel in 1897, A Ferris Wheel Was Built in Vienna That Still Stands Today. It Is Named TheINKA VERANDERA NUGRAHAОценок пока нет
- Introduccion: Encuentre La Segunda Derivada de Las Funciones Dadas: 1Документ3 страницыIntroduccion: Encuentre La Segunda Derivada de Las Funciones Dadas: 1Miguel BautistaОценок пока нет
- S&T HEX Design Kern ModelДокумент4 страницыS&T HEX Design Kern ModelWasim RazaОценок пока нет
- 5054 w10 Ms 41Документ3 страницы5054 w10 Ms 41Ali RanaОценок пока нет
- All Cases of HCF & LCMДокумент10 страницAll Cases of HCF & LCMmail.kaivalyasharma14Оценок пока нет
- Method of Differentiation DPP - 7Документ3 страницыMethod of Differentiation DPP - 7tanayОценок пока нет
- Namma Kalvi 12th Accountancy Unit 4 Sura English Medium Guide PDFДокумент10 страницNamma Kalvi 12th Accountancy Unit 4 Sura English Medium Guide PDFAakaash C.K.Оценок пока нет
- NAPLAN 2008 Final Test Numeracy Year 7 Non Calculator PDFДокумент12 страницNAPLAN 2008 Final Test Numeracy Year 7 Non Calculator PDFVia RabeОценок пока нет
- Differential Calculus - Module 1Документ7 страницDifferential Calculus - Module 1Noel S. De Juan Jr.Оценок пока нет
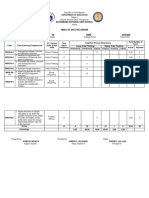
- Tos Math 8 3RD QuarterДокумент2 страницыTos Math 8 3RD Quarterrmm041550% (2)
- Probability DistributionДокумент8 страницProbability DistributionDaizy May U. NovesterasОценок пока нет
- Ckfëtf Epsf Jolqmx? SF) CLWSF/ DJGWL DXF +WL PJ+:J) Lr5S K - F) 6F) SN @) )Документ14 страницCkfëtf Epsf Jolqmx? SF) CLWSF/ DJGWL DXF +WL PJ+:J) Lr5S K - F) 6F) SN @) )Krishna ThapaОценок пока нет
- Fibre Reinforced CompositesДокумент2 страницыFibre Reinforced CompositesDikshant HasbeОценок пока нет
- Neowave Theory by Glenn Neely. Corrections. Rules To Spot A Flat and Zigzag. Variations of Corrections and Formal Logic RulesДокумент12 страницNeowave Theory by Glenn Neely. Corrections. Rules To Spot A Flat and Zigzag. Variations of Corrections and Formal Logic RulesSATISHОценок пока нет
- Lecture 02 AДокумент68 страницLecture 02 AHữu Nam NguyễnОценок пока нет
- Model Development and Loads Analysis of An Offshore Wind Turbine On A Tension Leg Platform, With A Comparison To Other Floating Turbine ConceptsДокумент129 страницModel Development and Loads Analysis of An Offshore Wind Turbine On A Tension Leg Platform, With A Comparison To Other Floating Turbine ConceptsUbani Obinna RanksОценок пока нет
- Cam Profile AnalysisДокумент4 страницыCam Profile AnalysisPremjeetSingh100% (1)
- Classification Algorithms IIДокумент9 страницClassification Algorithms IIJayod RajapakshaОценок пока нет
- Atkinson 2003Документ64 страницыAtkinson 2003Akshay29Оценок пока нет
- Ziekiwicnz PapersДокумент45 страницZiekiwicnz Paperscop593anti776100% (1)
- 1990 - 7 - Calendar ProblemsДокумент5 страниц1990 - 7 - Calendar ProblemsJim BoudroОценок пока нет
- Determinants of Customer Satisfaction and Customer Loyalty (Case Study of Café Grind & Pull Makassar)Документ5 страницDeterminants of Customer Satisfaction and Customer Loyalty (Case Study of Café Grind & Pull Makassar)IJAERS JOURNALОценок пока нет
- Computer Performance Engieeting Good Papers IdeaДокумент173 страницыComputer Performance Engieeting Good Papers IdeaVinicius CarlosОценок пока нет
- Lesson 2 Variables in ResearchДокумент19 страницLesson 2 Variables in ResearchJake ManzanoОценок пока нет
- Application of Statistics in Education: Naeem Khalid ROLL NO 2019-2716Документ13 страницApplication of Statistics in Education: Naeem Khalid ROLL NO 2019-2716Naeem khalidОценок пока нет
- Lista Ejercicios 3 PPEДокумент25 страницLista Ejercicios 3 PPEKarla HermorОценок пока нет