Вам также может понравиться
- MAC Tutorial-1 SolutionsДокумент8 страницMAC Tutorial-1 SolutionsCrack110011Оценок пока нет
- ME 401 Microprocessors & Automatic Control Tutorial QuestionsДокумент2 страницыME 401 Microprocessors & Automatic Control Tutorial QuestionsCrack110011Оценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Tutorial 4Документ4 страницыTutorial 4Crack110011Оценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- ME 401: Microprocessors and Automatic Control: Tutorial 5 - Oct 14, 2010 in ClassДокумент2 страницыME 401: Microprocessors and Automatic Control: Tutorial 5 - Oct 14, 2010 in ClassCrack110011Оценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- ME 401: Microprocessors and Automatic Control: Tutorial 5 - Oct 14, 2010 in ClassДокумент2 страницыME 401: Microprocessors and Automatic Control: Tutorial 5 - Oct 14, 2010 in ClassCrack110011Оценок пока нет
- ME 401 Microprocessors & Automatic Control Tutorial QuestionsДокумент2 страницыME 401 Microprocessors & Automatic Control Tutorial QuestionsCrack110011Оценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- ME 401 Microprocessors & Automatic Control Tutorial QuestionsДокумент2 страницыME 401 Microprocessors & Automatic Control Tutorial QuestionsCrack110011Оценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Tutorial 3Документ2 страницыTutorial 3Crack110011Оценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- ME401 Microprocessors Tutorial - Demultiplexers, Flip-Flops, CountersДокумент3 страницыME401 Microprocessors Tutorial - Demultiplexers, Flip-Flops, CountersCrack110011Оценок пока нет
- Midsem SolutionДокумент9 страницMidsem SolutionCrack110011Оценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Stake Codigo FonteДокумент40 страницStake Codigo FonteionОценок пока нет
- Edyza Sensors For Indoor FarmingДокумент35 страницEdyza Sensors For Indoor FarmingranabasheerОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- CV Agung PriatmodjoДокумент2 страницыCV Agung PriatmodjoAgung PriatmodjoОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Nadia Natasya: Working Experiences About MeДокумент1 страницаNadia Natasya: Working Experiences About MeNurul SyafiqahОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Setting up SSH and SCP securelyДокумент2 страницыSetting up SSH and SCP securelya17fanОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Mainframe230 Blogspot inДокумент4 страницыMainframe230 Blogspot inArunachalam NarayananОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- HCI Lec 1 Handout PDFДокумент5 страницHCI Lec 1 Handout PDFBryan PazОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- MS2020 Stratos Series Installation and User's Guide: Metrologic Instruments, IncДокумент112 страницMS2020 Stratos Series Installation and User's Guide: Metrologic Instruments, IncnoflodaОценок пока нет
- 824 WT-2Документ42 страницы824 WT-2Michael BОценок пока нет
- CSD Sierra & Sierra ToolsДокумент2 страницыCSD Sierra & Sierra ToolsKonrad ŻabaОценок пока нет
- Audio and Network LoggingДокумент2 800 страницAudio and Network LoggingSNEYDER ZABALAОценок пока нет
- Understanding the Language of ComputersДокумент94 страницыUnderstanding the Language of Computerskrishnagovind33Оценок пока нет
- Aiwa HT-DV50 DVD Home Cinema System SMДокумент12 страницAiwa HT-DV50 DVD Home Cinema System SMRogelioMartinezОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Mr. Salamudeen Alhassan Department of Computer Sc. UDS, Navrongo, GhanaДокумент15 страницMr. Salamudeen Alhassan Department of Computer Sc. UDS, Navrongo, GhanaAziz RahimОценок пока нет
- Order 7870856 Post SIEM Implementation FinalДокумент19 страницOrder 7870856 Post SIEM Implementation FinalQuinter WandiaОценок пока нет
- OMNet 4.0 ManualДокумент361 страницаOMNet 4.0 ManualHari KrishnaОценок пока нет
- How To Connect To MySQL Using PHPДокумент3 страницыHow To Connect To MySQL Using PHPSsekabira DavidОценок пока нет
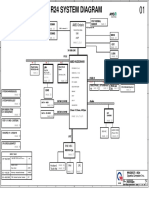
- R24 System Diagram: AMD OntarioДокумент36 страницR24 System Diagram: AMD OntarioRicardo SilvaОценок пока нет
- WDIP - API Specifications - Release 2.1 - v0.2 - FinalДокумент1 138 страницWDIP - API Specifications - Release 2.1 - v0.2 - FinalAnonymous QwwZmjОценок пока нет
- Technical Information Modbus SC2XXXДокумент44 страницыTechnical Information Modbus SC2XXXNicolas Silva BrionesОценок пока нет
- Programa de Impresion SmartformsДокумент2 страницыPrograma de Impresion Smartformsotracuentaaux5Оценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- A Framework To Effectively Develop Insider Threat Controls: Randy Trzeciak Dan CostaДокумент35 страницA Framework To Effectively Develop Insider Threat Controls: Randy Trzeciak Dan CostaJeya Shree Arunjunai RajОценок пока нет
- Language ProcessingДокумент29 страницLanguage ProcessingBhumika Dave50% (8)
- Mcq4 Questions on Spring Boot, Spring MVC, Microservices and REST APIsДокумент40 страницMcq4 Questions on Spring Boot, Spring MVC, Microservices and REST APIsAbcdОценок пока нет
- Developing Enterprise ArchitectsДокумент12 страницDeveloping Enterprise ArchitectskikinjoОценок пока нет
- Question 1:-Answer True or False For The Following StatementsДокумент5 страницQuestion 1:-Answer True or False For The Following StatementsMony JosephОценок пока нет
- Uniden User GuidesДокумент1 059 страницUniden User GuidesSensameaОценок пока нет
- Keys TopazДокумент6 страницKeys TopazMKОценок пока нет
- Total Station and Its ApplicationsДокумент4 страницыTotal Station and Its ApplicationsBrahmaji KommojuОценок пока нет
- DM 0903 Data Stage Slowly Changing PDFДокумент32 страницыDM 0903 Data Stage Slowly Changing PDFsirishdahagamОценок пока нет