Вам также может понравиться
- Design and Implementation of Hotel Management SystemДокумент36 страницDesign and Implementation of Hotel Management Systemaziz primbetov100% (2)
- The Way of The Samurai, Shadowrun BookДокумент19 страницThe Way of The Samurai, Shadowrun BookBraedon Montgomery100% (8)
- Preliminary DesignДокумент3 страницыPreliminary DesignElmer HabloОценок пока нет
- Naval Architecture Entry Level Interview QuestionsДокумент6 страницNaval Architecture Entry Level Interview QuestionsAbhilash ÅvmОценок пока нет
- Mathematical Method For Physicists Ch. 1 & 2 Selected Solutions Webber and ArfkenДокумент7 страницMathematical Method For Physicists Ch. 1 & 2 Selected Solutions Webber and ArfkenJosh Brewer100% (3)
- Hung201 PDFДокумент14 страницHung201 PDFMua Dong Tuyet RoiОценок пока нет
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОт EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОценок пока нет
- Loadline Calculations - Finding Various Drafts From Loadline Certificate ParticlarsДокумент1 страницаLoadline Calculations - Finding Various Drafts From Loadline Certificate ParticlarsPrinceОценок пока нет
- Symbol: Principal ParticularsДокумент9 страницSymbol: Principal ParticularsNiloy SahaОценок пока нет
- RSW - Buoys InstallationДокумент9 страницRSW - Buoys Installationothman salahОценок пока нет
- 0.8 MLD STP Design DrawingsДокумент9 страниц0.8 MLD STP Design DrawingsAminur RahmanОценок пока нет
- Absorber ReportДокумент10 страницAbsorber ReportZafirahAhmadFauziОценок пока нет
- Scale Prediction 2019Документ17 страницScale Prediction 2019WickyОценок пока нет
- SKF Bearing SelectДокумент7 страницSKF Bearing SelectJordi Colque DelgadoОценок пока нет
- Mineral Scale Prediction and Control at Extreme TDSДокумент12 страницMineral Scale Prediction and Control at Extreme TDSchanjunkaiОценок пока нет
- Tug & Barge - Daily Activity Report - Tug AgentДокумент40 страницTug & Barge - Daily Activity Report - Tug AgentArdiansyah BekaОценок пока нет
- Infiltration Gallery Yamna PDFДокумент5 страницInfiltration Gallery Yamna PDFshamoojeeОценок пока нет
- Heeling Lever CalculationДокумент1 страницаHeeling Lever Calculationhlsimon100% (1)
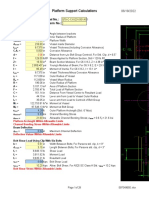
- Platform Calculation (Jan 22-2012)Документ28 страницPlatform Calculation (Jan 22-2012)SAMER OSMANОценок пока нет
- DESIGNING HYDRAULIC AIR Chamber in Water Sys PipelineДокумент7 страницDESIGNING HYDRAULIC AIR Chamber in Water Sys PipelinesaishankarlОценок пока нет
- NEERAJ StabilityДокумент37 страницNEERAJ StabilityAmal Benoy PukkunnelОценок пока нет
- Principal Particulars For A General Cargo Ship: Waterlines (Half Breadths)Документ13 страницPrincipal Particulars For A General Cargo Ship: Waterlines (Half Breadths)ManojОценок пока нет
- Draft CalcДокумент13 страницDraft CalcДмитрий ЯрычОценок пока нет
- BargeДокумент5 страницBargeBudimanОценок пока нет
- Doc. No. 15 - 42 09 050 - FOДокумент44 страницыDoc. No. 15 - 42 09 050 - FOdirgan_udyanaОценок пока нет
- P S A VigДокумент95 страницP S A VigvigneshОценок пока нет
- Test Ii: WPA Volume Mid Area LWLДокумент9 страницTest Ii: WPA Volume Mid Area LWLMark Lester AndayaОценок пока нет
- Forces at An AngleДокумент2 страницыForces at An AngleVivek PatelОценок пока нет
- ASTM - A131 Structural Steel For ShipsДокумент7 страницASTM - A131 Structural Steel For ShipsPamellaОценок пока нет
- Ship DesignДокумент2 страницыShip DesignMerrel0% (1)
- RESUME Naval Architect-RkДокумент2 страницыRESUME Naval Architect-RkRama KrishnaОценок пока нет
- Doc. No. 02 - 42 18 TF02 - BGДокумент8 страницDoc. No. 02 - 42 18 TF02 - BGryo asg5Оценок пока нет
- Calculation and Specification of Bilge System: Design Iv Machinery System Department of Marine EngineeringДокумент36 страницCalculation and Specification of Bilge System: Design Iv Machinery System Department of Marine EngineeringAfanda Dwi R RОценок пока нет
- Environment/ Metdata/Geotech InputsДокумент36 страницEnvironment/ Metdata/Geotech InputsRajith KrОценок пока нет
- Steps of CalculationДокумент16 страницSteps of Calculationsarno sarnoОценок пока нет
- Draught Survey SpreadsheetДокумент4 страницыDraught Survey SpreadsheetNikola HercegОценок пока нет
- Bollard Pull AESДокумент7 страницBollard Pull AESsoongbinОценок пока нет
- Calculation and Specification of Bilge SystemДокумент40 страницCalculation and Specification of Bilge SystemTegar LanangОценок пока нет
- Towing Design Rev2Документ19 страницTowing Design Rev2Ludovic LandemaineОценок пока нет
- Copia de 403221780 Detail Calculation of Ballast SystemДокумент16 страницCopia de 403221780 Detail Calculation of Ballast SystemRUBEN BARTOLOME GARCIAОценок пока нет
- Station KeepingДокумент67 страницStation KeepingSagar MhatreОценок пока нет
- Buoyancy Calculation (5.6kN Tank)Документ2 страницыBuoyancy Calculation (5.6kN Tank)Darren Kam0% (1)
- 1 Moment 2 Moment I: ST NDДокумент1 страница1 Moment 2 Moment I: ST NDKhairil AzmanОценок пока нет
- QualifДокумент72 страницыQualifsabah8800Оценок пока нет
- MA Scriptie M Messinella PDFДокумент185 страницMA Scriptie M Messinella PDFGeorge GamallielОценок пока нет
- Fatigue Analysis Tool 1.0Документ2 страницыFatigue Analysis Tool 1.0Nurul HudaОценок пока нет
- (EDITED-FINAL) Sludge - Storage CalculationДокумент16 страниц(EDITED-FINAL) Sludge - Storage CalculationAmro Ahmad AliОценок пока нет
- Fentek Marine Systems: Project TitleДокумент6 страницFentek Marine Systems: Project TitleTeo Keng ChauОценок пока нет
- Tipe Perlengkap Pengerukan Types of Dredging Equipment Part 1. Mechanical DredgesДокумент15 страницTipe Perlengkap Pengerukan Types of Dredging Equipment Part 1. Mechanical Dredgesfathurahmad 2205Оценок пока нет
- Surge ForceДокумент2 страницыSurge ForceJ A S JASОценок пока нет
- ABS BucklingДокумент7 страницABS BucklingOwoseni DareОценок пока нет
- Longitudinal Strength CalculationДокумент15 страницLongitudinal Strength CalculationJessica CelayaОценок пока нет
- Calculation of Deck Strenght When Longitudinal Girders Are 3100mm Away and No Supports in BetweenДокумент6 страницCalculation of Deck Strenght When Longitudinal Girders Are 3100mm Away and No Supports in BetweennaseemtycheОценок пока нет
- 75T Bollard Pull Asd Tug: EnduranceДокумент6 страниц75T Bollard Pull Asd Tug: EnduranceManishОценок пока нет
- MagnorДокумент2 страницыMagnorAntónio NôroОценок пока нет
- Propeller DesignДокумент3 страницыPropeller DesignYan Naing ShinОценок пока нет
- Side Wall of Screen Chamber & Grit Chamber DataДокумент5 страницSide Wall of Screen Chamber & Grit Chamber DataShankarappa NОценок пока нет
- Pipeline Head Loss Calculation Process - Engineered Software Knowledge Base - Global SiteДокумент3 страницыPipeline Head Loss Calculation Process - Engineered Software Knowledge Base - Global SitemachinemanОценок пока нет
- Book 11 (BGW)Документ13 страницBook 11 (BGW)dirgan_udyanaОценок пока нет
- ShipVibration ToddДокумент5 страницShipVibration Toddcostantin2Оценок пока нет
- Initial Ship DesignДокумент37 страницInitial Ship DesignlakshmiОценок пока нет
- Aashhto LRFD 2007 - Concrete Deck Design: HC 17,5 CM OKДокумент7 страницAashhto LRFD 2007 - Concrete Deck Design: HC 17,5 CM OKprasadnn2001Оценок пока нет
- CalculationsДокумент6 страницCalculationsMichael Haise100% (1)
- Himesh PanchalДокумент12 страницHimesh PanchalHimesh PanchalОценок пока нет
- IACS Requirements For MODUДокумент53 страницыIACS Requirements For MODUPrabhakar TiwariОценок пока нет
- World Map PDFДокумент1 страницаWorld Map PDFJeff Adlouie SuarezОценок пока нет
- 14OTCA BrochureДокумент11 страниц14OTCA BrochurePrabhakar TiwariОценок пока нет
- Life RaftДокумент5 страницLife RaftPrabhakar TiwariОценок пока нет
- FDDДокумент16 страницFDDPrabhakar TiwariОценок пока нет
- PC200 - 45.62 boom-2of2-GAДокумент1 страницаPC200 - 45.62 boom-2of2-GAPrabhakar TiwariОценок пока нет
- 5 Best Practice Tips For Better Billing: A Guide For Project OrganisationsДокумент4 страницы5 Best Practice Tips For Better Billing: A Guide For Project OrganisationsPrabhakar TiwariОценок пока нет
- HSM OffshoreДокумент2 страницыHSM OffshorePrabhakar TiwariОценок пока нет
- Bid Package FOR Bassein Development & C-26 Cluster Pipeline ProjectДокумент4 страницыBid Package FOR Bassein Development & C-26 Cluster Pipeline ProjectPrabhakar TiwariОценок пока нет
- CAT Genset RangeДокумент1 страницаCAT Genset RangePrabhakar TiwariОценок пока нет
- Hirsch Ocean EngineeringДокумент6 страницHirsch Ocean EngineeringPrabhakar TiwariОценок пока нет
- Analysis of Damage of Jacket With BargeДокумент10 страницAnalysis of Damage of Jacket With BargePrabhakar TiwariОценок пока нет
- Dillimax 690 eДокумент4 страницыDillimax 690 ePrabhakar TiwariОценок пока нет
- En 10060 - TolerancesДокумент3 страницыEn 10060 - TolerancesAyush Jain100% (3)
- 20samarat Annd1Документ35 страниц20samarat Annd1Prabhakar Tiwari100% (1)
- Accommodation Barge 299 PAX With AccoДокумент3 страницыAccommodation Barge 299 PAX With AccoPrabhakar Tiwari100% (1)
- DAM-CAP-01 Ver 1.0 - Electric CapstansДокумент4 страницыDAM-CAP-01 Ver 1.0 - Electric CapstansPrabhakar TiwariОценок пока нет
- Maurice Nicoll The Mark PDFДокумент4 страницыMaurice Nicoll The Mark PDFErwin KroonОценок пока нет
- IMO CatalogueДокумент115 страницIMO CataloguejessiemartinОценок пока нет
- ISODC, IIT Kharagpur Team, May 2008Документ269 страницISODC, IIT Kharagpur Team, May 2008Prabhakar Tiwari100% (1)
- Friede&Goldmann JackupsДокумент8 страницFriede&Goldmann JackupsPrabhakar TiwariОценок пока нет
- Fuel Injection PDFДокумент11 страницFuel Injection PDFscaniaОценок пока нет
- Anin, Cris Adrian U. Experiment Water Flirtation ELECTIVE 103Документ2 страницыAnin, Cris Adrian U. Experiment Water Flirtation ELECTIVE 103Cris Adrian Umadac AninОценок пока нет
- 127 Bba-204Документ3 страницы127 Bba-204Ghanshyam SharmaОценок пока нет
- TLE-Carpentry7 Q4M4Week4 PASSED NoAKДокумент12 страницTLE-Carpentry7 Q4M4Week4 PASSED NoAKAmelita Benignos OsorioОценок пока нет
- Updated PDPДокумент540 страницUpdated PDPnikulaaaasОценок пока нет
- Samudra-Pasai at The Dawn of The European AgeДокумент39 страницSamudra-Pasai at The Dawn of The European AgemalaystudiesОценок пока нет
- Festival Implementation PlanДокумент5 страницFestival Implementation Planapi-318058589Оценок пока нет
- CivilCAD2014 English Rev1Документ443 страницыCivilCAD2014 English Rev1Nathan BisОценок пока нет
- Spermatogenesis: An Overview: Rakesh Sharma and Ashok AgarwalДокумент25 страницSpermatogenesis: An Overview: Rakesh Sharma and Ashok Agarwalumar umarОценок пока нет
- RISO RZ User GuideДокумент112 страницRISO RZ User GuideJojo AritallaОценок пока нет
- Python PyДокумент19 страницPython Pyakhilesh kr bhagatОценок пока нет
- InfltiДокумент13 страницInfltiLEKH021Оценок пока нет
- 4th Conference ParticipantsДокумент14 страниц4th Conference ParticipantsmaxОценок пока нет
- SITXWHS001 - Participate in Safe Work Practices Student GuideДокумент42 страницыSITXWHS001 - Participate in Safe Work Practices Student GuideMarianne FernandoОценок пока нет
- Dr. Muhammad Mumtaz: Thesis TitleДокумент10 страницDr. Muhammad Mumtaz: Thesis TitleDr. Muhammad MumtazОценок пока нет
- Red Hat Ceph Storage-1.2.3-Ceph Configuration Guide-en-US PDFДокумент127 страницRed Hat Ceph Storage-1.2.3-Ceph Configuration Guide-en-US PDFJony NguyễnОценок пока нет
- Financial/ Accounting Ratios: Sebi Grade A & Rbi Grade BДокумент10 страницFinancial/ Accounting Ratios: Sebi Grade A & Rbi Grade Bneevedita tiwariОценок пока нет
- BDC Based Phase ControlДокумент14 страницBDC Based Phase ControlTiewsoh LikyntiОценок пока нет
- Far 2 Quiz 03212024Документ6 страницFar 2 Quiz 03212024red118831Оценок пока нет
- Asin URL Index URL/keyword DomainДокумент30 страницAsin URL Index URL/keyword DomainStart AmazonОценок пока нет
- Data Base Format For Company DetailsДокумент12 страницData Base Format For Company DetailsDexterJacksonОценок пока нет
- Psi Engines Product Sheet PDFДокумент2 страницыPsi Engines Product Sheet PDFDaniel DelgadoОценок пока нет
- RAMSCRAM-A Flexible RAMJET/SCRAMJET Engine Simulation ProgramДокумент4 страницыRAMSCRAM-A Flexible RAMJET/SCRAMJET Engine Simulation ProgramSamrat JanjanamОценок пока нет
- SoC Showdown: Snapdragon 810 Vs Exynos 7420 Vs MediaTek Helio X10 Vs Kirin 935 - AndroidAuthority - PDДокумент19 страницSoC Showdown: Snapdragon 810 Vs Exynos 7420 Vs MediaTek Helio X10 Vs Kirin 935 - AndroidAuthority - PDArpit SharmaОценок пока нет
- Authenticating Digital EvidenceДокумент36 страницAuthenticating Digital Evidenceatty_gie3743Оценок пока нет
- E&i QC Inspector Resum and DocumentsДокумент24 страницыE&i QC Inspector Resum and DocumentsIrfan 786pakОценок пока нет