Академический Документы
Профессиональный Документы
Культура Документы
An-42004 Using The ML4425-ML4426 BLDC Motor Controllers
Загружено:
frazier8553Исходное описание:
Оригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
An-42004 Using The ML4425-ML4426 BLDC Motor Controllers
Загружено:
frazier8553Авторское право:
Доступные форматы
June 1996
Application Note 42004
by John DeFiore
Using the ML4425/ML4426
BLDC Motor Controllers
INTRODUCTION THEORY OF OPERATION
The purpose of this document is to explain the theory and During startup, the motor is initially at rest and has no
application of Micro Linear’s ML4425 and ML4426 back EMF to lock the commutator loop. In order to get
brushless DC motor controller IC’s, with speed control. It sufficient back EMF to close the loop, it is necessary to
shows typical applications, along with information about start the motor “open loop”, until the motor attains a
choosing the various components necessary for proper speed of about 100 RPM. To accomplish this, the VCO
operation. It presents in depth control system information ramps linearly, accelerating the motor to speed. Once at
for those who wish to use it, but the user can pick minimum speed the loop is closed and the motor
component values without extensive analysis by using the accelerates to operating speed under closed loop
formulas developed for each component. commutation. The non-energized phase provides the
feedback necessary to properly commutate the motor. The
GENERAL DESCRIPTION phase voltage is integrated over a 60 degree interval.
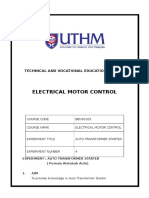
(Figure 1 shows an idealized phase waveform with the
The ML4425 and ML4426 provide sensorless motor back EMF superimposed as the dotted line.)
commutation plus on chip PWM speed control for If the commutation is perfect, no net voltage change will
brushless DC motors. An integrating back EMF sensor, occur on the output filter. If the commutation is early or
combined with an on-chip VCO and sequencer, form a late, the output filter will pump up or down to bring the
phase locked commutation loop. The parts provide on next commutation closer to the ideal position. (For a
chip braking and power failure detection. In 12V detailed servo analysis of the commutation loop see the
applications, they can drive external P and N channel section on picking critical component values.) Finally an
FET’s directly. Interface circuitry will allow driving of on chip PWM speed loop provides speed control.
higher voltage motors. The ML4425 has an input for a
variable motor current limit, while the ML4426 has
forward and reverse capability.
NEUTRAL
0 60 120 180 240 300 0
Figure 1. Motor Phase Waveform with Back-EMF Superimposed (Ideal Commutation)
REV. 1.0 10/25/2000 1
Application Note 43
HOW TO OPERATE THE CAUTION!!!
ML4425/ML4426 Systems built with the ML4425/ML4426 may contain
Figure 2 shows a typical application for the ML4425/ voltage potentials capable of causing serious injury
ML4426. The parts are a flexible building block for motor and components which, when failed, may shatter or
driver systems. Because of the variations in the types of explode. Please use extreme caution when operating
applications and motors, the first step in using the these parts. The use of protective eye wear is strongly
ML4425/ML4426 is to choose the major system recommended. To safely observe in-circuit waveforms
components. Some of the system level choices are: an isolation transformer should be inserted between
the AC line and the circuit under test. Caution is
OUTPUT DRIVER SELECTION AND INTERFACING required when testing the part with motors. Loose
fitting clothing can catch in the rotor or motor load
Output driver selection depends mainly on the motor causing injury. Ties are especially dangerous. Do not
voltage and current. For 12V motors, the chip can drive attempt to hold or stop the rotor with your hand, as
external N and P channel FET’s directly. For motors up to this can cause injury as well. Use a dynamometer for
80V, the approach shown in Figure 5 can be used to drive load testing.
the P channel FET’s. For very high currents or voltages
above 80V, the best scheme is to use N channel FET’s in
the high side, and use a high side drive interface, such as 2. Once the reset capacitor charges past the threshold, the
those available from IXYS, International Rectifier, and ramp state begins. An internal current source charges
others. (See Figure 6). IGBT’s could be used in place of the filter on pin 20. This causes the VCO frequency to
FET’s in this case. Note that during the alignment phase, increase, commutating the motor in an open loop
the high side drivers are turned on first, and held on for manner. This rate should not exceed the rate at which
the required settling time. This means that the typical the rotor can turn, or the commutation loop will not
charge pump scheme for driving the high side FET’s will lock. The time that the part remains in the ramp state is
not work. A floating supply can be developed to provide determined by CEN, on pin 19.
power to the high side drivers. Another possible approach 3. When the ramp period is over, the part closes the
is to pulse the BRAKE input prior to starting, to build up a commutation loop and begins normal operation.
charge on the bootstrap caps. The reset period must not
last long enough to significantly discharge the bootstrap CURRENT LIMIT CONTROL
caps. Use of the BRAKE function for braking is not
The ML4425/ML4426 make use of a constant off time
recommended for high power drives.
pseudo PWM scheme to limit the maximum current in the
STARTUP IMPLEMENTATION motor. During motor operation, a comparator compares the
voltage across the current sense resistor (times a gain of 5)
Startup schemes are critical with sensorless motor drivers. with an internal 2.5V reference. An internal one shot fires
The reason a startup scheme is necessary is that the back when the sensed current appearing as a voltage on the
EMF of the motor is used to determine the position of the ISENSE pin exceeds 0.5V. This shuts off the low side drivers
rotor. If the motor is not rotating, or is rotating slowly, for the one shot’s off time. COS determines the one shot’s off
there is little or no back EMF to sense. The ML4425/ time. By choosing the off time appropriately, (See the section
ML4426 uses an open loop approach to start the motor on choosing COS). In the ML4425, the 2.5V reference may
turning, then closes a PLL to lock the commutation phase be changed by changing the voltage on the ILIMIT pin, pin
to the phase of the rotor. The ML4425/ML4426 have built 12. In this case, the average current will be proportional to
in analog startup circuitry. The following sequence starts the voltage on the ILIMIT pin.
the motor:
SPEED CONTROL
1. The IC is held in reset, for a time proportional to the
value of the capacitor on pin 17, CRST. This applies full Speed control is internal to the ML4425/ML4426. The
current to the windings by turning two of the upper and speed control operates as follows: The voltage on the RC
one of the lower drivers on. This will cause the rotor to pin, pin 20, will be proportional to motor speed. This is
move to a point which is 30 electrical degrees before compared to the VSPEED input by a transconductance
the first commutation step. The IC must be held in this amplifier. The output of the transconductance amplifier
state until the rotor has settled. (See the section on (the error signal) is changed to a voltage by the network
choosing the reset capacitor for more information.) on the CPWM pin. This error signal feeds a PWM
comparator. A ramp waveform feeds the other end of the
PWM comparator. The capacitor on the COSC pin sets the
frequency of the ramp and therefore the PWM frequency.
This PWM signal switches the low side FET’s, causing the
motor speed to remain constant. The speed control loop
may be broken and an external speed control added by
removing the network attached to pin 5 and driving it with
a low impedance source. This will change the PWM duty
cycle applied to the motor, allowing external control.
2 REV. 1.0 10/25/2000
Application Note 43
*OPTIONAL
20µF 1µF 2K
0.01µF 12V
10µF
* 5V
80K
16 15 20 21 14
* 2K
RVCO RCVCO CRAMP VCC
CVCO
*
VCO VFLT
POWER FAIL 18
RCPWM
VCO
5 13
PWM PH1
1µF 22
6 SPEED
CONTROL BACK EMF PH2
COSC SAMPLER 23
50K PH3
1nF 24
RREF
27
SPEED 6.9V
P1
REF 2
7
137K VREF P2 BLDC
10K 3
ML4425/ML4426 MOTOR
8 HIGH SIDE P3 12V
4
GATE DRIVE
VSPEED
DIRECTION
12 COMMUTATION
N1
F/R CONTROL LOGIC 9
ML4426 LOW SIDE N2
PWM CURRENT GATE DRIVE 10
25 CONTROL N3
AND ONE SHOT 11
BRAKE POWER
BRAKE DRIVERS
CRST CEN COS ISENSE GND
17 19 26 12 1 28
PWM
1s ALIGN 2s RAMP OFF TIME 1K 0.5V THRESHOLD
ILIMIT
ML4425
0.47µF 1µF 100pF 300pF RLIMIT
Figure 2. ML4425/ML4426 Typical Application
CRITICAL COMPONENT SELECTION
In order to properly select the critical components for the Operation of the parts require choosing the following
ML4425/ML4426 you should know the following things: components. The previous values are necessary to choose
some of them.
1. The motor operating voltage.
2. The maximum operating current for the motor. 1. RSENSE, the motor current sense resistor.
3. The number of poles the motor has. 2. The ISENSE filter network.
4. The back EMF constant of the motor. 3. COS , the one shot timing capacitor.
5. The torque constant of the motor. 4. CVCO, the VCO timing capacitor.
6. The desired speed of operation. 5. The reset capacitor, CRST.
7. The moment of inertia of the motor and its load. 6. The enable capacitor, CEN, and possibly CRAMP.
8. The coefficient of viscous friction. 7. The PWM oscillator timing capacitor CPWM .
8. The speed loop filter network CPWM and RPWM.
If you do not know one or more of the above values, it is
still possible to pick components for the ML4425/ML4426, 9. The VCO filter components, C1, C2 and R.
but some experimentation may be necessary to determine
the optimal values.
REV. 1.0 10/25/2000 3
Application Note 43
The purposes of these components are explained in the COS
following sections, and the following motor will be used
The one shot capacitor determines the off time after the
as an example for choosing components:
current limit is activated, i.e. the voltage on the ISENSE pin
(pin 12) exceeded the voltage on the ILIMIT pin (pin 27).
Voltage 12V This value should allow the winding current to decay
Number of poles 12 during the off time by an amount equal to the increase in
the current in the minimum on time. The minimum on
Ko 0.269 time for the one-shot is approximately 1µs. In a system
Kt 25 × 10–5 N × m/A with low on resistance parts and high Q motor windings
(The Q is the ratio of the winding’s reactive impedance to
Desired RPM 5400 the resistance.) It is necessary to have an off time given by
Viscous damping factor 0.4 the following equation:
Moment of Inertia 72 × 10–6 Kg × m2
TOFF = 1.11× 10−6 × VMOTOR
Maximum current 2A
VMOTOR is the voltage applied to the motor windings.
RSENSE The capacitance for a given off time may be read from the
graph on P.5-113 of the datasheet, or for values larger than
The function of RSENSE is to provide a voltage proportional 30µs, the following formula may be used:
to the motor current, for current limit purposes. The
current limit one shot will trip when the voltage across the TOFF = 947.4 × COS + 5
sense resistor reaches 0.5V. In order to pick a value for
RSENSE, it is necessary to know the maximum current TOFF in microseconds, COS in microfarads.
delivered to the motor. This is a function of how much
Solving for COS:
starting torque is required, the acceptable temperature rise
in the windings, the rotational losses and the maximum
1.11× 10−6 × VMOTOR − 5 × 10−6
permissible magnetic field. If the motor is sized correctly, COS =
the maximum current will be the current necessary to start 947.4
the motor against its maximum load. This is given by the
starting torque divided by the torque constant. Choosing Now COS is in Farads.
RSENSE to give a maximum current of IMAX yields the This is the maximum value that COS should be. Higher
following equation: average torque during the current limit cycle can be
achieved by reducing this value experimentally, while
RSENSE = 0.5 monitoring the motor current carefully, to be sure that a
IMAX runaway condition does not occur. This runaway
condition occurs when the current gained during the on
IMAX is the maximum motor current. time exceeds the current lost during the off time, causing
the motor current to increase until damage occurs. For
The power dissipation is obviously IMAX squared times
most motors this will not occur, as it is usually a self
RSENSE, so the resistor should be sized appropriately. For
limiting phenomenon. For the example motor, COS comes
the example motor, RSENSE should be 0.25Ω. The power
out to 8.8nF, so a 10nF capacitor would be a safe choice.
dissipated is 1W, so choose a 2W resistor.
CVCO
ISENSE FILTER
It is important to pick the VCO capacitor so that the
The ISENSE filter consists of an RC lowpass filter in series
nominal operating speed corresponds to about 3.75V at
with the current sense signal. The purpose of this filter is
the RC pin (pin 20). In variable speed applications the
to filter out noise spikes on the current, which may cause
voltage on pin 20 should also not exceed 7V. The VCO
false triggering of the one shot circuit. It is important that
frequency is given by:
this filter not slow down the current feedback loop, or
destruction of the output stage may result. The FMAX = 0.05 × N × RPM
recommended values for this circuit are R = 1KΩ and
C = 300pF. This gives a time constant of 300ns, and will N is the number of poles.
filter out spikes of shorter duration. These values should The VCO gain is:
suffice for most applications. If excessive noise is present
on the ISENSE pin, the capacitor may be increased at the −6
expense of speed of current loop response. The filter time K VCO MIN = 2.42 × 10
constant should not exceed 600ns or it may have a CVCO
significant impact on the response speed of the one shot
current limit circuit.
4 REV. 1.0 10/25/2000
Application Note 43
So making a linear approximation, VCO frequency is Note that this is very similar to the settling of a damped
given by: spring mass system, and similar dynamics apply. The
angular equivalent of F = M × A gives:
F = K VCO × VRC
2
Solving for VRC which is the voltage at pin 20, we get: J × d θ = −k × θ
d t2
0.05 × N × RPM × CVCO
VRC = J is the moment of inertia of the motor’s rotor, plus load.
2.42 × 10−6
Adding a viscous friction and eddy current loss
Finally, setting VRC equal to 3.75V, solving for CVCO and component:
simplifying, gives:
2
−4 J× d θ +r× d θ +k ×θ = 0
CVCO 1.815 × 10 d t2 dt
N × RPM
r is the loss factor, which includes eddy current and
Now in a variable speed application, the previous viscous friction losses.
equation can be used to ensure that the voltage at pin 20
does not exceed 7 volts at the maximum RPM. For the Solving the previous equation gives a resonant frequency
example motor, CVCO would be 2.8nF, so 2.7nF would be of:
a good choice. For very high speed (e.g. 100KRPM) or
wide speed range motors, the dynamic range of the VCO k
may not suffice. The minimum VCO voltage is 0.5V, and J
f=
the maximum is 7 volts. This gives a 14:1 speed control 2× π
range, and may not allow very high speed motors to start.
One technique for use with these motors is to use an
f is in Hz.
analog switch with several VCO capacitors to switch the
value of the VCO capacitance to lower values when An N pole motor will have a worst case angle of π/N
certain speeds are reached. A comparator with hysteresis radians. A good approximation for settling time of a unit
on pin 20 can sense the speed, and drive the analog step to 5% is:
switch. This has an effect similar to “shifting gears”. tS = 3
r × k
RESET CAPACITOR
2×k J
The reset capacitor is connected to pin 17. The function of
the reset capacitor is to provide a time delay, during The r/2k factor is known as the damping factor, and, can
which the part will lock the rotor to a known position. range from 0.1 in a motor with very little damping to 0.9
During this time period the part turns on two of the upper in a heavily damped motor. In an N pole motor, the torque
and one of the lower output drivers. This results in a fixed nulls occur every 2 × π/N. In one half that angle, the
current in the windings, a stationary magnetic field, and a motor goes from zero to full torque. Full torque is given by
locked rotor. If the position is not at a torque null during the motor torque constant, times the maximum current set
the reset period, it will require some time to move to the by the ILIMIT feature. Therefore, the restoring torque
locked position, and settle. This time period is dependent constant k is equal to:
on the motor, the load, the friction and eddy current N × Kt × IMAX
losses, and current limit setting. Solving the differential k=
equation for the motor/load system can give an π
approximate starting value. IMAX is the maximum current set by the ILIMIT feature, in
Amps. Kt is the motor torque constant in
Assuming that the magnetic field causes a restoring torque
proportional to the angular displacement, the rotor torque N × M, and N is the number of motor poles.
is: The reset capacitor must charge to the threshold trip
τ = –k × θ voltage during the settling time. A current source supplies
0.75µA into the capacitor, and the threshold is 1.5V. The
k is the restoring torque slope in N × M/radian, and θ is time to charge is:
the displacement angle in radians.
tS = C × 1.5V
0.75 × µA
Solving for C:
tS × 0.75 × µA
C=
1.5 × V
REV. 1.0 10/25/2000 5
Application Note 43
For the example motor, the damping factor, r/2k is given VCO FILTER (RC PIN)
as 0.4. Therefore, ts is approximately 1.5s. Choosing a
The VCO filter consists of a capacitor to ground, in
conservative standard value, the reset capacitor should
parallel with a series resistor and capacitor to ground.
then be 0.56µF.
(See Figure 4). The pin that drives this network is a
Start with the value of C calculated as shown. If the motor transconductance stage, so that the voltage out to current
has not settled before the ramp up phase, then it will be in transfer function of this block is simply the impedance
necessary to increase the value of C until the motor is of the block. The purpose of this network is to filter the
motionless when the ramp starts. If fast starting is VCO frequency out of the position/commutation loop,
essential, and the above value seems too large, a decrease and to provide phase compensation for the loop so that it
in C will allow for faster starting. Note that part to part and is stable. The impedance of the network is:
supply tolerances require some safety margin in the
selection of C. If the motor constants and load inertia are R × C2 × s + 1
not known, or if enough nonlinear elements are present in s × (C2 + R × C1× s × C2 + C1)
the load, (e.g. friction), an empirical method may be used
to determine C. Start with a 1µf capacitor. If the motor In order to properly determine the values for this filter, it is
appears to have settled well before ramp up, half the necessary to do a servo analysis on the entire
capacitance value. If the motor has not settled by ramp commutation loop. If the reader does not have an
up, double the value. When a change from not settled to extensive background in servo systems, the formulas in
settled, or vice verse is observed, home in on the optimum boxes at the end of this section along with Table 1 can be
value by successively reducing the change in capacitance successfully used to pick values for these components. It is
by 1/2, then increasing or decreasing the value as necessary to know the back-EMF constant, Ke, of the
appropriate. This “binary search” method will allow quick motor to pick these values correctly. Since the
convergence to the proper value. commutation loop must have acceptable phase margin
both at startup and at the maximum operating frequency,
ENABLE CAPACITOR the compensation’s phase lead should be located at the
geometric mean between these two frequencies. For those
This capacitor provides a time delay after the reset period who need detailed analysis the following information is
for the motor to ramp up to speed. The following equation given: The commutation loop is a phase locked loop,
gives an approximate starting value for this capacitor. If which locks to the rotor’s position. Note that this inner
starting is not reliable, this capacitor may be increased loop does not attempt to modify the position of the rotor,
until it is. but modifies the commutation times to match whatever
−12 J
C = 1.27 × 10 position the rotor has. The speed loop changes the rotor
(CVCO × (N × (Kt × IMAX ))) velocity, and the commutation loop locks to the rotor’s
position to commutate the phases at the correct times. A
Where J is the total inertia in Kg × m2. Kt is the torque
servo analysis should start with a block diagram of the
constant in N × m/Amp. CVCO is the VCO capacitor system dynamics (See Figure 3): The phase detector
in farads. N is the number of poles. IMAX is the consists of the motor, the back EMF sampler/integrator,
maximum current ILIMIT. and the gm amplifier. The loop filter’s transfer function
Where C is CEN connected to pin 19. For the example follows the phase detector, and the VCO’s gain is in the
motor, CEN = 3.4µF. section on choosing CVCO. Note that as in any PLL, the
VCO is an integrator in that it accepts a voltage and
outputs a frequency. Phase is defined as the integral of
frequency, so this necessitates an s in the denominator of
the VCO transfer function. Writing the expression for the
open loop gain of the entire loop:
A OL = Ke × Kv × ω × Atten × gm × R × C2 × s + 1
2× π s2(C2 + R × C1× s × C2 + C1)
6 REV. 1.0 10/25/2000
Application Note 43
Where Aol is the open loop gain, Ke is the back EMF must give a positive phase shift when the magnitude
constant of the motor in volts/radian/sec., Kv is the VCO crosses unity. This leads to the conclusion that the pole
gain in radian/sec/volt (NOT Hz/volt). ω is the rotor speed must occur after the magnitude crosses the unity gain
in radians/second (NOT RPM). Atten is the resistive frequency. The pole’s frequency must be low enough to
divider ratio used to divide down the back EMF from high filter the VCO frequency out of the loop, and high enough
voltage motors, (Nominally 0.5 if no external resistors.), to allow the zero to boost the phase margin of the loop are
and gm is the transconductance of the phase detector acceptable over all operating conditions. Writing the pole
amplifier. (See the section on back EMF attenuation frequency as a multiple of the zero frequency gives:
resistors for more details on Atten.)
ωp = M × ωz
Simplifying the above equation by making the following
substitutions: Then the maximum phase lead occurs at the geometric
mean:
Ko = Ke × Kv × ω × Atten × gm
2× π ω MAXLEAD = M × ωz
1 In PLL design it is common to approximate a third order
ωz =
R × C2 loop by a second order model. This is valid because the
filter pole occurs well after the open loop response has
ωp = C2 + C1 reached unity gain. If we approximate the system as a
R(C1× C2) second order PLL, a damping factor of 0.7 will give very
Yields: little overshoot and good transient response to
disturbances. For a second order system, the settling time
A OL = Ko × s + ωz to d% is given by:
s2 × C1(s + ωp)
− ln d
100
Note that the s2 in the denominator gives rise to two poles tS =
at the origin, and 180 degrees of phase shift. In order for ζ × ωn
this system to be stable, the zero formed by the numerator
A/RADIAN
V/A
ROTOR
PHASE
BEMF (R × C2 × s + 1)
SAMPLER s × (C2 + R × C1 × s × C2 + C1)
Ke × ω × Atten gm = 1.25E-4 A/V
2×π
LOOP FILTER
PHASE DETECTOR
RADIANS/V
2.42 × 10–6
×2×π
CVCO × s
VCO
Figure 3.
Gm = 1.25 x 10–4
+
SAMPLED ZRC
RC
PHASE
–
R
C1
C2
FOUT VCO
KVCO(HZ/V)
Figure 4. Back EMF Phase Lock Loop Components
REV. 1.0 10/25/2000 7
Application Note 43
Where ζ is the damping factor, and ωn is the natural Where E = –ln(d/100). Solving for C1 yields:
frequency. If the PLL must settle within Ns cycles, then the
time to settle is:
C1 = 1 × Ko × Ns2
4 M d 2
TACQ = Ns ln
2
× FVCO
FVCO
100
Ns should be as small a number as possible while still
allowing the loop filter to filter out the frequency Then C2 is just:
components of the VCO. Asking for a settling time of one
C2 = C1× (M − 1)
or two cycles would mean that the filter must respond on
the order of the VCO frequency, and would not allow And substituting back into the equation for ωz:
adequate filtering. Too long a settling time could cause
improper commutation and loss of lock for abrupt FVCO 1
2×E × =
(Ns × M )
changes in rotor position. A good choice for Ns would be
20 cycles. Using the second order relation: 1 × Ko × Ns2 × (M − 1) × R
4 M (E2 × F 2
VCO )
ωo = 2 × ζ × ωn
where ωo is the bandwidth and ωn is the natural or Solving for R and simplifying:
resonant frequency, and combining the above yields:
FVCO
R = 2 × M × ln d ×
F 100 Ns × Ko(1− M)
ωo = −2 × ln 1 d × VCO
100 Ns The following table summarizes the constants used in the
This will be the required closed loop bandwidth of the equations for R, C1 and C2.
commutation loop. The phase margin is given by the following expression:
Now the maximum phase lead should occur when the
open loop gain crosses unity, which will yield the
maximum phase margin. Since the open loop gain varies ( )
Φm = a tan M − a tan 1
M
with rotor speed, the best place to put the maximum
phase lead is the geometric mean between the maximum This is dependent only on the spread between the pole
rotor speed and the startup speed at the end of the ramp and the zero, because the uncompensated phase is 180
period. If the commutation loop closes after the ramp degrees due to the two poles at the origin. With M = 10,
period at a speed of 100 RPM, then: the maximum phase margin will be 55 degrees. These
values should provide good performance in most
FVCO = 0.05 × N × 100 × MAXRPM applications.
Where N is the number of poles, and MAXRPM is the
maximum operation speed of the motor. Using the As an example, consider a motor with 12 poles,
equation for ωMAXLEAD and the above: Ko = 0.269, a decade of separation between the pole and
zero, 20 PLL cycles to settle to 3% of final value, and (min
F
M × ωz = −2 × ln 1 d × VCO and max) RPM = 5400. First, the number of poles and the
100 Ns RPM require that FVCO = 3240Hz. The value for ω in the
formula for Ko should be based on the geometric mean
Or: between starting speed and operating speed. Plugging
these values in for C1, C2 and R, we get:
FVCO
ωz = −2 × ln 1 d × C1 = 0.228 × µF
100 Ns × M
( ) C2 = 2.055 × µF
Now returning to the original open loop gain equation, R = 4.691 × KΩ
and noting that at the ωo frequency, the magnitude must
equal 1, we get:
FVCO F
1j × 2 × E × + 2 × E × VCO
Ns Ns M
Ko × =1
2
FVCO FVCO FVCO
1j × 2 × E × Ns × C1× 1j × 2 × E × Ns + 2 × E × M × Ns
8 REV. 1.0 10/25/2000
Application Note 43
TABLE 1.
CONSTANT DESCRIPTION FORMULA RECOMMENDED
VALUE
FVCO VCO frequency for mean motor speed FVCO = 0.05 × N × RPM Depends on motor and application
(see text).
M Spread between pole and zero in loop ωp = M × ωz 10-20
filter.
d PLL will settle to d percent in Ns PLL 3
cycles − ln d
100
ts =
ζ × ωn
Ns The number of PLL cycles necessary to 20
tacq = Ns
settle to d percent after a step of phase FVCO
Ko The motor back EMF constant, in V/rad/S Ko = Ke × Kv × ω × Atten × gm Depends on motor and application
times the VCO gain, in Hz/V (note the unit
change and the absence of the 2 × π in the
denominator), times the angular speed of Ke is supplied by the motor manufacturer
the rotor, in rad/s times the back EMF The VCO gain is
attenuation constant, times the gm of the −6
phase detector’s transconductance K VCO MIN = 2.42 × 10
amplifier.
CVCO
The angular speed of the rotor is the
expressed in r/s. The back EMF
attenuation (Atten) is the divider
hooked between the motor and the
PH1-3 back EMF sense inputs,
(Nominally 0.5), and gm is 1.25E-4
Plotting the Bode response of the filter alone:
COMPENSATION GAIN
COMPENSATION PHASE
100
0
MAGNITUDE, dB
PHASE, DEGREES
50
–50
0
–100
1 10 100 1000 1 × 104
1 10 100 1000 1 × 104
FREQUENCY, Hz
FREQUENCY, Hz
REV. 1.0 10/25/2000 9
Application Note 43
This clearly shows the phase boost due to the RAMP CAPACITOR
compensation, and the rolloff to filter the VCO frequency.
If you do not encounter startup problems, it is not
Now the overall loop bandwidth is calculated from the
necessary to include CRAMP, on pin 21. If you have a large
preceding equations to be 181Hz. The overall open loop
inertial load with low damping and high motor speed you
gain and phase are shown in the following graphs:
OPEN LOOP GAIN
should read the following section. The ML4425/ML4426
100 output a fixed 0.5µA current on pin 20 during ramp up.
Midpoint between startup This is the input to the VCO. Therefore, the rotor’s
and maximum speed acceleration is a function of the current, VCO gain and
50 Minimum operating speed the loop filter components only. In some cases, where the
Speed where commutation VCO capacitor is small due to a high running speed, and
MAGNITUDE, dB
loop closes the motor inertia is large, the rotor may not be able to
follow the VCO during ramp up. In these cases, it is
0 necessary to add a capacitor from pin 21 to ground. This
capacitor is switched in during ramp only, and allows the
rate of acceleration during ramp up to be lowered. An
–50 approximate starting point for this capacitor is given by
the following equation:
−6
–100 CRAMP = J × 0.5 × 10 × Kv × 2 × π − (C1+ C2)
1 10 100 1000 1 × 104 IMAX × Kt 3×N
FREQUENCY, Hz Where J is the inertia of the motor plus load, Kv is the
VCO gain, N is the number of poles, IMAX is the maximum
motor current, Kt is the torque constant, and C1 and C2
OPEN LOOP PHASE
–120 are the loop filter components on pin 20. Normally, the
result of the preceding equation will be a negative
–130 number, meaning that no ramp capacitor is necessary. If
the result of this equation is greater than zero, then the
ramp capacitor should be included.
–140
PHASE, DEGREES
COSC
–150
This capacitor sets the PWM ramp oscillator frequency.
This is the PWM “switching frequency”. If this value is too
–160
low, <20KHz, then magnetostriction effects in the motor
may cause audible noise. If this frequency is too high,
–170 >30KHz, then the switching losses in the output drivers
may become a problem. 25KHz should be a good
–180 compromise for this value, which can be obtained by
1 10 100 1000 1 × 104 using a 1nF capacitor.
FREQUENCY, Hz
RVCO AND RREF
RVCO should be 80K and RREF should be 137K for normal
As expected, the open loop gain at the center frequency
operation.
crosses 0dB when the phase peaks, giving a bandwidth of
approximately 180Hz and a phase margin of 55 degrees. RCPWM
The phase margin at startup and at nominal speed are also
better than 40 degrees. For variable speed applications, This pin is the output of a transconductance amplifier.
the phase margin will remain within these limits, provided A resistor and a capacitor in series with this pin and
the nominal speed is chosen to be the maximum speed, connected to ground form the speed loop compensation.
and the speed is controlled downward from there. Using The motor will have a mechanical time constant, given
this approach, the rotor speed can vary more than an approximately by:
order of magnitude and still maintain acceptable phase
margin. τm = J × Rw
2
Ke
10 REV. 1.0 10/25/2000
Application Note 43
Where J is the moment of inertia of the rotor plus the load, BACK EMF ATTENUATION RESISTORS
Rw is the winding resistance, and Ke is the back- E.M.F.
If you use the ML4425/ML4426 with a motor supply
constant. This pole occurs at a relatively low frequency,
which is higher than 12V, you must divide down the back
and will limit the frequency of response of the servo loop.
EMF signals from the motor so as not to exceed 12V on
In order to get better response, the RC combination on the
RCPWM pin can be used to provide phase lead for the the phase sensing inputs, PH1, PH2 and PH3. The
speed loop. This combination also sets the open loop gain ML4425/ML4426 have internal 8K resistors to ground, so
characteristics, and therefore the accuracy of the speed an external resistance in series with each phase and the
loop. In order to pick components for this loop, it is respective phase sense input forms a voltage divider. (See
necessary to decide on a desired closed loop bandwidth. Figure 6) This divider is the Atten constant in the previous
The chosen closed loop bandwidth should be formulas for picking the loop filter. For example for a
substantially lower than the bandwidth of the phase 100V motor, the series resistors should give 12V at the
locked loop used for commutation, in order to preserve input to the part for the absolute maximum input voltage.
acceptable phase margin. This is usually not a problem, as Choosing 110V as the maximum voltage to allow some
the mechanical time constant of the motor is necessarily safety margin gives a divider ratio of 12/110 or 0.109.
much lower than the commutation loop response. A series resistor of 80.6K gives a safe ratio of 0.09.
Depending on the motor and its load, a bandwidth in the OUTPUT DRIVE
1–10Hz range is easily achievable. The frequency of the
compensating zero should be set to be a decade below The ML4425/ML4426 can drive external N and P channel
the unity gain crossover frequency, so that its contribution FET’s directly, if 12V operation is used. For voltages
to the phase lead will be maximum at the crossover. The between 24V and 80V, an external cascode transistor can
following formula gives the value of C necessary for these be used to level shift the drive voltages. For higher
conditions: voltages, or large currents, external drivers, coupled with
all N-channel FET’s are the best solution. (IGBT’s could be
VCC × CVCO used as well.) The external FET’s used with the part should
CC = 482.314 × N × be rated to handle the full current limit current plus
2 2
freq × Ke × 2.5 + 98.696 × τm × freq appropriate derating. They should stand off at least 1.5–2
times the motor supply voltage. Thermal considerations
and heatsinking are important and should be given
consideration in the preliminary design phase. In some
Where freq is the desired unity gain crossover frequency, applications, when a velocity loop is closed around a
VCC is the supply voltage, CVCO is the VCO capacitor on motor, and there is a large inertia attached to the motor,
pin 15, N is the number of poles in the motor, and the during deceleration the energy stored in the inertia can
other quantities are defined above. cause the motor to generate a current. This current will
pump up the power supply capacitors to a potentially
Then, the value of R should be dangerous voltage, causing capacitor and output stage
failure. If this is a problem, the solution is to add a circuit
R= 10 which senses when the supply voltage increases by a
2 × π × CC × freq given amount and switches a resistive load into place to
If the speed loop is unstable, it is possible that the desired dissipate the energy. This problem does not occur when
bandwidth is too high, and reducing the value of freq. braking, but the N-channel FET's must handle most of the
should solve the problem. energy in the rotating mass if braking is necessary. The
brake function should not be used with high voltage high
energy motors.
REV. 1.0 10/25/2000 11
Application Note 43
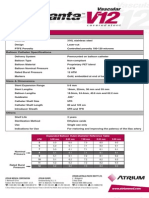
DRIVING MOTORS UP TO 80V LAYOUT CONSIDERATIONS
The schematic of Figure 5 shows how to drive motors up Good layout practices are vital to getting the ML4425/
to 80V using a cascode approach. The external bipolar ML4426 to work reliably. In particular, the supplies must
transistors stand off the higher voltage, and level shift the be well decoupled close to the chip with 0.1µF ceramic
high side drive. The reason that this approach is restricted capacitors in parallel with 1µF electrolytic or tantalum
to 80V is the availability of high voltage P channel FET’s is capacitors. The supply to the output drivers must also be
limited, and the cost is high. It may be possible to use this well decoupled close to the drivers with at least a 0.1µF in
approach with higher voltage motors if higher voltage P parallel with a good quality low ESR 10µF electrolytic.
channel FET’s can be obtained. High current motors may require more capacitance.
Controlling the current paths is important as well. If a
DRIVING HIGH VOLTAGE MOTORS groundplane is used, separate conductors (traces) should
return the motor currents to the sense resistor which can
An example of one way to drive a high voltage motor is connect to the ground plane near the supply ground. The
shown in Figure 6. The IR2130 provides the interface and same approach should be used for the supply voltage.
drive capability for the larger FET’s. The floating supply The purpose of this technique is to keep the high current
powers the 3 high side drive circuits. In the application high speed signals out of the ground plane, to reduce
notes for many of the FET drivers they show a “flying system noise. If the supply voltage input is not near the
capacitor” approach to developing drive for the high side power decoupling caps for the drivers, additional supply
N-channel devices. This circuit connects a diode from the decoupling should be used where the supply enters the
+12V rail to a capacitor, which has the other end hooked board. Watch capacitive coupling from high dv/dt signals
to the motor phase output. The “flying capacitor” charge into traces or planes on other layers. Use multiple vias to
pump scheme will not work with the ML4425/ML4426, connect high current traces from the top of the board to
since during the reset period, the high side drives turn on the bottom. Standard layout practice applies to the rest of
first, and remain on for the reset duration. This does not the circuit. Keep traces as short as possible, minimize high
allow the “flying capacitor” to charge. One possible current loop length, etc.
solution for this problem is to turn on the brake
momentarily before starting the motor, so that the lower
N channel devices will turn on and charge the bootstrap
capacitor before the reset period. This can be
accomplished automatically with a one shot and some
logic gates. It is important to be sure that the voltage on
the capacitor does not droop significantly during the reset
phase. Another possible solution is shown in Figure 6.
This solution generates three isolated voltage supplies for
driving each of the high side FET’s. The CMOS inverter
shown is configured as an oscillator to drive a small
toroidal core with three secondary windings. The
secondary windings are rectified by bridge rectifiers and
filtered with filter capacitors. The bridge rectifiers supply a
very small average current and can be tiny SOT-143 type
devices.
12 REV. 1.0 10/25/2000
+24 TO
80V
C1 R2 R3 R4
C2
C 10K 10K 10K
CAPACITOR
M1 M2 M3
+12V IRFR9120 IRFR9120 IRFR9120
Q1 Q2 Q3
2N6718 2N6718 2N6718
L1
L3 MOTOR
L2
C3
CAPACITOR
M4 M5 M6
IRFR120 IRFR120 IRFR120
C5
R15 1K 300p
R1 1 ISENSE GND 28
1 R14 2K R20 137K
2 P1 ML4425/ RREF 27
R13 2K
3 P2 ML4426 COS 26 RUN
R12 2K C16 100pF
4 P3 BRAKE 25 S1
C11 CAP R16 50K R8 RES1
5 RCPWM PH3 24
C12 R9 RES1 SW DRDT
6 COSC PH2 23
CAP C9 1µF C17 1nF R10 RES1
7 VREF PH1 22 BRAKE
R18
SPEED CONTROL VOLTAGE
8 VSPEED CRAMP 21
20K R7 100 C7 1µF
9 N1 RCVCO 20
Figure 5. Driving Motors up to 80V
R5 100 R17 2K C6 10µF
10 N2 CEN 19
R6 100
11 N3 VFLT 18 PWR FAIL
N/C FOR ML4425
12 F/R CRST 17
(ILIMIT, ML4425)
R11 VCO 13 VCO RVCO 16
REVERSE
1.5K
S2 +12V 14 VCC CVCO 15 R19
SW SPST C14 C10 80K
C15 C8
FOR ML4426 CAP CAP 0.47µF 1µF
C14 C13
CAPACITOR CAP
REV. 1.0 10/25/2000
13
Application Note 43
14
+VMOTOR
VS1
1µF
10µF
+ 100µF 10 µF 1 µF
47pF
10K 7T VB1 0.1µF
28
VB1
25T +12V 1 VCC VB1
U2 100
VS2 2 HIN1 HO1 27
IR2130
0.1µF PH1
10µF 3 HIN2 VS1 26
+ VS1
VB2 4 HIN3 25
VB2 PH2
5 LIN1 VB2 24
25T
23
100
6 LIN2 HO2 MOTOR
74HC04 VS3
0.1µF
7 LIN3 VS2 22
10µF VS2
+ 8 FAULT 21
Application Note 43
VB3 VB3
9 ITRIP VB3 20
PH3
25T 19
100
10 CAO HO3
0.1µF
11 CA– VS3 18
VS3
12 VSS 17
100
13 VSO LO1 16
15
100
14 LO3 LO2
100
RSENSE
C5
R15 1K 300p
1 ISENSE GND 28
R14 2K R20 137K
2 P1 ML4425/ RREF 27
R13 2K C16
3 P2 ML4426 COS 26
R12 2K 0.01µF
4 P3 BRAKE 25
MC14050 C11 CAP R16 50K R8 RES1
5 RCPWM PH3 24
Figure 6. Driving High Voltage Motors
C12 R9 RES1
6 COSC PH2 23
CAP C9 1µF C17 1nF R10 RES1
7 VREF PH1 22 ALIGN
R18
USE +5V SUPPLY FOR CMOS GATES SPEED CONTROL VOLTAGE
8 VSPEED CRAMP 21
20K R7 100 C7 1µF
9 N1 RCVCO 20
R5 100 R17 2K C6 10µF
10 N2 CEN 19
R6 100
11 N3 VFLT 18 PWR FAIL
MC14049 N/C FOR ML4425
12 F/R CRST 17
(ILIMIT, ML4425)
R11 VCO 13 VCO RVCO 16
REVERSE +12V
1.5K
S2 14 VCC CVCO 15 R19
SW SPST C14 C14 C10 80K
C13 C15 C8
FOR ML4426 CAPACITOR CAP CAP
CAP 0.47µF 1µF
DISCLAIMER
FAIRCHILD SEMICONDUCTOR RESERVES THE RIGHT TO MAKE CHANGES WITHOUT FURTHER NOTICE TO
ANY PRODUCTS HEREIN TO IMPROVE RELIABILITY, FUNCTION OR DESIGN. FAIRCHILD DOES NOT ASSUME
ANY LIABILITY ARISING OUT OF THE APPLICATION OR USE OF ANY PRODUCT OR CIRCUIT DESCRIBED HEREIN;
NEITHER DOES IT CONVEY ANY LICENSE UNDER ITS PATENT RIGHTS, NOR THE RIGHTS OF OTHERS.
LIFE SUPPORT POLICY
FAIRCHILD’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DEVICES
OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT OF FAIRCHILD SEMICONDUCTOR
CORPORATION. As used herein:
1. Life support devices or systems are devices or systems 2. A critical component in any component of a life support
which, (a) are intended for surgical implant into the body, device or system whose failure to perform can be
or (b) support or sustain life, and (c) whose failure to reasonably expected to cause the failure of the life support
perform when properly used in accordance with device or system, or to affect its safety or effectiveness.
instructions for use provided in the labeling, can be
reasonably expected to result in a significant injury of the
user.
www.fairchildsemi.com
2000 Fairchild Semiconductor Corporation
Вам также может понравиться
- PWMДокумент16 страницPWMRICHIHOTS2100% (2)
- 5 Simple DC Motor Speed Controller Circuits ExplainedДокумент18 страниц5 Simple DC Motor Speed Controller Circuits Explainedlasser22832165Оценок пока нет
- DC Motor Fyp EdittdДокумент20 страницDC Motor Fyp EdittdRabia BilalОценок пока нет
- Starting Methodologies PDFДокумент10 страницStarting Methodologies PDFReynee Shaira Lamprea MatulacОценок пока нет
- Pure Sine Invereter InfoДокумент107 страницPure Sine Invereter Infoolawale gbadeboОценок пока нет
- An 906 AДокумент16 страницAn 906 AAhmed SialaОценок пока нет
- Lab 6 Kawalan MotorДокумент20 страницLab 6 Kawalan MotorMohd FiqrieОценок пока нет
- Unit Iii Induction Motor Drives: Dept. of EEEДокумент17 страницUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarОценок пока нет
- Sensorless Control of Permanent Magnet AC Motors: October 1994Документ7 страницSensorless Control of Permanent Magnet AC Motors: October 1994Ismail BayraktarОценок пока нет
- En CD00003771Документ11 страницEn CD00003771Vikas KumarОценок пока нет
- Stepping Motor Control CircuitsДокумент9 страницStepping Motor Control CircuitsrfcbaccaratОценок пока нет
- Soft Starter Working Principle - Electrical Solution & TechnologyДокумент8 страницSoft Starter Working Principle - Electrical Solution & TechnologyanuragpugaliaОценок пока нет
- Brushless DC Motor Control Using PLCДокумент6 страницBrushless DC Motor Control Using PLCvuluyen6688Оценок пока нет
- Drives Manual Final EeeДокумент60 страницDrives Manual Final EeenandhakumarmeОценок пока нет
- Giri 1Документ18 страницGiri 1GiridharОценок пока нет
- Stepper Motor Driver Considerations Common ProblemsДокумент12 страницStepper Motor Driver Considerations Common ProblemsErnesto Salomon Jaldín MendezОценок пока нет
- Agenda ROBO 247 - Robotic Applications Week #12: DC Motor Control Cont'dДокумент30 страницAgenda ROBO 247 - Robotic Applications Week #12: DC Motor Control Cont'dŘājinderRajputОценок пока нет
- Permanent Magnet Synchronous Motor ControlДокумент3 страницыPermanent Magnet Synchronous Motor ControlMarcin KowalskiОценок пока нет
- MPPT Solar and Wind Power Boost Charge ControllerДокумент15 страницMPPT Solar and Wind Power Boost Charge ControllergabrielamedeletОценок пока нет
- 50W Forward Converter With Synchronous Rectification and Secondary Side Control PDFДокумент30 страниц50W Forward Converter With Synchronous Rectification and Secondary Side Control PDF양영주Оценок пока нет
- Solar MPPTДокумент16 страницSolar MPPTKiran ZoroОценок пока нет
- Brush LessДокумент17 страницBrush LessPresanth AjayОценок пока нет
- Electrical Drives (ARG)Документ24 страницыElectrical Drives (ARG)alu bhindiОценок пока нет
- P0118 Common Driver Platform 12V 18V SystemsДокумент6 страницP0118 Common Driver Platform 12V 18V SystemsJORGE ERRAZQUINОценок пока нет
- Microchip CLC DescriptionДокумент12 страницMicrochip CLC DescriptionKamlesh YadavОценок пока нет
- Circuit Stepper Motor DriverДокумент17 страницCircuit Stepper Motor DriverkalpicoОценок пока нет
- UC3845 Technical ExplanationДокумент15 страницUC3845 Technical ExplanationankurmalviyaОценок пока нет
- Stepper Motor Control Using The PIC16F684Документ12 страницStepper Motor Control Using The PIC16F684edward_conzaОценок пока нет
- The 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsДокумент51 страницаThe 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsAmAnDeepSingh100% (1)
- How To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - A High Power On-Board Charger DesignДокумент5 страницHow To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - A High Power On-Board Charger DesignThien DinhОценок пока нет
- Solar InvereterДокумент47 страницSolar InvereterReshma RaviОценок пока нет
- BLDC Motor: 4 Pole 2 Phase Motor OperationДокумент10 страницBLDC Motor: 4 Pole 2 Phase Motor OperationG.R.AzhaguvelSaranya Professor MechanicalОценок пока нет
- Pro j2Документ2 страницыPro j2nupur8891Оценок пока нет
- VFD 2Документ63 страницыVFD 2Sam100% (1)
- Motorola Application NotesДокумент10 страницMotorola Application Notesvasudeva yasasОценок пока нет
- BLDC Sensorless Algorithm Tuning: Application NoteДокумент10 страницBLDC Sensorless Algorithm Tuning: Application NoteMaikel WilkeОценок пока нет
- DC Motor Speed ControllerДокумент22 страницыDC Motor Speed ControllerShafqt MbrkОценок пока нет
- AC Drives and Soft Starter Application GuideДокумент5 страницAC Drives and Soft Starter Application GuideMinh TranОценок пока нет
- Aplicacion Uc3842Документ15 страницAplicacion Uc3842Gian Mejia100% (1)
- Slua 143Документ15 страницSlua 143Tonia KataОценок пока нет
- AppNote03 Uc3842Документ14 страницAppNote03 Uc3842Heriberto Flores AmpieОценок пока нет
- Basic of DCDCДокумент14 страницBasic of DCDCAnil KoulОценок пока нет
- EN em 160Документ2 страницыEN em 160Merk ErikОценок пока нет
- Requirement of Converter in Electric VehiclesДокумент2 страницыRequirement of Converter in Electric VehiclesmaniОценок пока нет
- Auto Transformer StarterДокумент9 страницAuto Transformer Starterdiana100% (2)
- Sensorless BLDC ControlДокумент36 страницSensorless BLDC ControlPaolo TripicchioОценок пока нет
- Stepper Motor ControlДокумент5 страницStepper Motor ControlKumar R Ranjan86% (7)
- MBC25081 Drive StepperДокумент7 страницMBC25081 Drive StepperLuis PalenciaОценок пока нет
- Simulation of Novel Technique For DC Drive For Crane ApplicationДокумент5 страницSimulation of Novel Technique For DC Drive For Crane ApplicationKypa Meenendra Nath Reddy100% (1)
- Automatic Inverter Output Voltage Correction Circuit - Homemade Circuit ProjectsДокумент7 страницAutomatic Inverter Output Voltage Correction Circuit - Homemade Circuit ProjectsK. RAJA SEKARОценок пока нет
- Position and Speed Control For Dish DC Motor: ObjectivesДокумент4 страницыPosition and Speed Control For Dish DC Motor: ObjectivesGoran MiljkovicОценок пока нет
- PCB Project DetailsДокумент4 страницыPCB Project DetailsmohanОценок пока нет
- Chapter 5Документ7 страницChapter 5Karl John P. PanizalesОценок пока нет
- AC Drives and Soft Starter Application Guide - AllenBradleyCoДокумент5 страницAC Drives and Soft Starter Application Guide - AllenBradleyCojoyama100% (1)
- DC Motor Braking and Speed ReversalДокумент7 страницDC Motor Braking and Speed Reversalceng1903Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- CapstoneДокумент23 страницыCapstoneA - CAYAGA, Kirby, C 12 - HermonОценок пока нет
- 1962 Gibson Johnny SmithДокумент5 страниц1962 Gibson Johnny SmithLuisОценок пока нет
- Anxiety Disorders - Causes, Types, Symptoms, & TreatmentsДокумент5 страницAnxiety Disorders - Causes, Types, Symptoms, & Treatmentsrehaan662Оценок пока нет
- 18 Ray Optics Revision Notes QuizrrДокумент108 страниц18 Ray Optics Revision Notes Quizrraafaf.sdfddfaОценок пока нет
- Sony Cdm82a 82b Cmt-hpx11d Hcd-hpx11d Mechanical OperationДокумент12 страницSony Cdm82a 82b Cmt-hpx11d Hcd-hpx11d Mechanical OperationDanОценок пока нет
- Cobalamin in Companion AnimalsДокумент8 страницCobalamin in Companion AnimalsFlávia UchôaОценок пока нет
- Ensemble Averaging (Machine Learning)Документ3 страницыEnsemble Averaging (Machine Learning)emma698Оценок пока нет
- SAT Practice TestДокумент77 страницSAT Practice TestfhfsfplОценок пока нет
- Assignment 2 Mat435Документ2 страницыAssignment 2 Mat435Arsene LupinОценок пока нет
- Fines Reduction Project at Wendling Bowser QuarryДокумент2 страницыFines Reduction Project at Wendling Bowser QuarryMarcos Antonio ParoliniОценок пока нет
- Plans PDFДокумент49 страницPlans PDFEstevam Gomes de Azevedo85% (34)
- G.S 5Документ2 страницыG.S 5Jamsher BalochОценок пока нет
- 3rd Quarter Exam (Statistics)Документ4 страницы3rd Quarter Exam (Statistics)JERALD MONJUANОценок пока нет
- Scott 2001Документ20 страницScott 2001Mariana CatiniОценок пока нет
- Biology Accel Syllabus 2011-2012Документ3 страницыBiology Accel Syllabus 2011-2012Mike DeleonОценок пока нет
- 9 5 - 358 362 PDFДокумент5 страниц9 5 - 358 362 PDFمالك مناصرةОценок пока нет
- Structural Analysis and Design of Pressure Hulls - The State of The Art and Future TrendsДокумент118 страницStructural Analysis and Design of Pressure Hulls - The State of The Art and Future TrendsRISHABH JAMBHULKARОценок пока нет
- Bomba MixerДокумент2 страницыBomba MixerBinelli79Оценок пока нет
- Catalogo GatesДокумент255 страницCatalogo GatesBenjamin HedoneweОценок пока нет
- Cost Analysis - Giberson Art GlassДокумент3 страницыCost Analysis - Giberson Art GlassSessy Saly50% (2)
- Tuberculosis PowerpointДокумент69 страницTuberculosis PowerpointCeline Villo100% (1)
- Health Promotion Throughout The Life Span 7th Edition Edelman Test BankДокумент35 страницHealth Promotion Throughout The Life Span 7th Edition Edelman Test Bankcourtneyharrisbpfyrkateq100% (17)
- Mahindra & MahindraДокумент13 страницMahindra & MahindraAbhishek DharmadhikariОценок пока нет
- Advanta V12 Data SheetДокумент2 страницыAdvanta V12 Data SheetJuliana MiyagiОценок пока нет
- Napoleonic WargamingДокумент13 страницNapoleonic WargamingandyОценок пока нет
- Eng DS Epp-2314 1410Документ2 страницыEng DS Epp-2314 1410MarkusAldoMaquОценок пока нет
- Rail Vehicle DynamicsДокумент55 страницRail Vehicle DynamicsdfОценок пока нет
- Flight Vehicle Design:: Example 2 (Uav)Документ43 страницыFlight Vehicle Design:: Example 2 (Uav)Anmol KumarОценок пока нет
- HCPL 316J 000eДокумент34 страницыHCPL 316J 000eElyes MbarekОценок пока нет
- 300 PSI CTS (MP-1115) Operation Manual Rev1.3Документ18 страниц300 PSI CTS (MP-1115) Operation Manual Rev1.3Juan Manuel VizosoОценок пока нет