Вам также может понравиться
- 8085 Features, Signal DescriptionДокумент13 страниц8085 Features, Signal DescriptionRakesh Kumar DОценок пока нет
- Programming 8085 Microprocessor ArchitectureДокумент34 страницыProgramming 8085 Microprocessor ArchitectureAbhinandan JainОценок пока нет
- 8085 MaterialДокумент12 страниц8085 MaterialsameerОценок пока нет
- Microprocessor 8085 Architecture: 3.2 Block Diagram of 8085Документ16 страницMicroprocessor 8085 Architecture: 3.2 Block Diagram of 8085Kannan Muthusamy100% (1)
- MICROPROCESSOR ARCHITECTUREДокумент40 страницMICROPROCESSOR ARCHITECTUREAlango Jr TzОценок пока нет
- Notes Unit 1Документ25 страницNotes Unit 1Ashish YadavОценок пока нет
- 8085 MicroprocessorДокумент38 страниц8085 MicroprocessorPrateek PandeyОценок пока нет
- Unit 1Документ78 страницUnit 1Vasunthara DОценок пока нет
- 3-Ee8551-Microprocessors and MicrocontrollersДокумент109 страниц3-Ee8551-Microprocessors and MicrocontrollersKeerthana SahadevanОценок пока нет
- Experiment No. 1: Department of Electronics & Comm - EnggДокумент7 страницExperiment No. 1: Department of Electronics & Comm - EnggJaspreet KaurОценок пока нет
- MPMC Eee Unit - I 8085 ProcessorДокумент35 страницMPMC Eee Unit - I 8085 ProcessorAnonymous zaMNkL100% (1)
- 8085 Microprocessor Unit 1Документ13 страниц8085 Microprocessor Unit 1Sajid Akram100% (1)
- Presentation 1Документ23 страницыPresentation 1khushalee.chavadaОценок пока нет
- 8-bit Microprocessor 8085 Features and ArchitectureДокумент29 страниц8-bit Microprocessor 8085 Features and ArchitectureAnif Ilham IsmailОценок пока нет
- Microprocessor Lecture Notes 1 10Документ202 страницыMicroprocessor Lecture Notes 1 10Ambarish SinghОценок пока нет
- of Unit-1: Introduction To Microprocessor and Microprocessor 8085Документ22 страницыof Unit-1: Introduction To Microprocessor and Microprocessor 8085abahynОценок пока нет
- Eec 503 PDFДокумент22 страницыEec 503 PDFmohitОценок пока нет
- 8085 Microprocessor Architecture, Pin DiagramДокумент10 страниц8085 Microprocessor Architecture, Pin DiagramSachin Jaysenan0% (1)
- MCT Unit 2Документ26 страницMCT Unit 2Aravind RajОценок пока нет
- Introduction To Microprocessor 8085Документ23 страницыIntroduction To Microprocessor 8085GousAttarОценок пока нет
- Microprocessor - 8085 Internal ArchitectureДокумент25 страницMicroprocessor - 8085 Internal ArchitectureTanveer Ahmed HakroОценок пока нет
- Unit I PDFДокумент25 страницUnit I PDFSomnath2014Оценок пока нет
- Programming With 8085 MicroprocessorДокумент33 страницыProgramming With 8085 MicroprocessorBlackk SpydoОценок пока нет
- 8085Документ56 страниц8085Kunal MeherОценок пока нет
- Microprocessor 8085 AДокумент134 страницыMicroprocessor 8085 ASaumya MohanОценок пока нет
- M4 Yash AllabadiДокумент6 страницM4 Yash Allabadidegijon661Оценок пока нет
- Ii Microprocessor - 8085 ArchitectureДокумент6 страницIi Microprocessor - 8085 ArchitectureYohannis DanielОценок пока нет
- Pin Description and Signals of 8085 MicroprocessorДокумент9 страницPin Description and Signals of 8085 MicroprocessorKripanand JhaОценок пока нет
- Microprocessor 8085Документ25 страницMicroprocessor 8085hetal_limbaniОценок пока нет
- Ece 8085 MicroprocessorДокумент26 страницEce 8085 Microprocessorgourav VermaОценок пока нет
- 8085 Is Pronounced AsДокумент9 страниц8085 Is Pronounced AsArbaaz khan786Оценок пока нет
- Microprocessor 8-bit TitleДокумент55 страницMicroprocessor 8-bit TitleAASTHA KIETОценок пока нет
- 8085 Architecture & Pin DescriptionFileДокумент19 страниц8085 Architecture & Pin DescriptionFileKaseya TakahashiОценок пока нет
- The 8085 Microprocessor ArchitectureДокумент12 страницThe 8085 Microprocessor ArchitectureBernard MunyithyaОценок пока нет
- 08 Microprocessor PDFДокумент20 страниц08 Microprocessor PDFthumatimadhusudhanОценок пока нет
- 8085 Microprocessor - Functional Units: AccumulatorДокумент5 страниц8085 Microprocessor - Functional Units: AccumulatorDeep KambleОценок пока нет
- 8-bit Parallel I/O Device 8255 Programmable InterfaceДокумент32 страницы8-bit Parallel I/O Device 8255 Programmable Interfacesulekha saxenaОценок пока нет
- Cs 2 12th ExperimentДокумент73 страницыCs 2 12th ExperimentShubham0% (1)
- Unit-1 (1) Draw and Explain The Internal Architecture of 8085Документ11 страницUnit-1 (1) Draw and Explain The Internal Architecture of 8085Mann MehtaОценок пока нет
- Lecture1423722820 PDFДокумент101 страницаLecture1423722820 PDFdavОценок пока нет
- Micro Processor DineshДокумент9 страницMicro Processor DineshsandyОценок пока нет
- Microprogram ProgramingДокумент95 страницMicroprogram Programingpoojasree27022003Оценок пока нет
- Unit Ii 8085 Micro Processor 8085 Architecture:: ME 6702 Mechatronics Mechanical Engineering 2019-20Документ26 страницUnit Ii 8085 Micro Processor 8085 Architecture:: ME 6702 Mechatronics Mechanical Engineering 2019-20GopinathОценок пока нет
- MPD e ContentsДокумент112 страницMPD e Contentsmeera joshiОценок пока нет
- 8085 MicroprocessorДокумент25 страниц8085 Microprocessorprofessor2062Оценок пока нет
- Microprocessor - 8085 ArchitectureДокумент3 страницыMicroprocessor - 8085 ArchitectureAlok AnkitОценок пока нет
- EE6502 MPMC Two Marks With AnswerДокумент10 страницEE6502 MPMC Two Marks With Answervlsimani9110100% (1)
- Microprocessor - 8085 ArchitectureДокумент3 страницыMicroprocessor - 8085 ArchitectureN.D.SurendharОценок пока нет
- MPA UNIT 1 and 2Документ48 страницMPA UNIT 1 and 2Shiva Krishna KamjulaОценок пока нет
- MICROPORCESSOR 8085 Lab ManualДокумент53 страницыMICROPORCESSOR 8085 Lab ManualAjay PatilОценок пока нет
- IN and OUT instructions in the 8086 microprocessor: input and output operationsДокумент10 страницIN and OUT instructions in the 8086 microprocessor: input and output operationsdtselvanОценок пока нет
- FMM Unit-1Документ28 страницFMM Unit-1CS EОценок пока нет
- Microprocessor - 8085 Architecture - TutorialspointДокумент3 страницыMicroprocessor - 8085 Architecture - TutorialspointRajat RajОценок пока нет
- 8085 MicroprocessorДокумент16 страниц8085 MicroprocessorVinay FelixОценок пока нет
- MPMCДокумент20 страницMPMCAnonymous 3XeTp7drОценок пока нет
- Syllabus: 8085 ArchitectureДокумент25 страницSyllabus: 8085 Architecturetamilvendhan87Оценок пока нет
- Block Diagram and Architecture of 8085 MicroprocessorДокумент13 страницBlock Diagram and Architecture of 8085 MicroprocessorShubham SahuОценок пока нет
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960От EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Оценок пока нет
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.От EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Оценок пока нет
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationОт EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationОценок пока нет
- Bharat Sanchar Nigam Limited (Website:) Application Form For Closure /surrender of TelephoneДокумент2 страницыBharat Sanchar Nigam Limited (Website:) Application Form For Closure /surrender of TelephoneAbhinavОценок пока нет
- N Citizen Charter Jan 2019Документ6 страницN Citizen Charter Jan 2019Anish ChibОценок пока нет
- Policy For Watchlist and Defaulter List in GeMДокумент2 страницыPolicy For Watchlist and Defaulter List in GeMAnish ChibОценок пока нет
- Select Others in DEPARTMENT Field For House JobДокумент1 страницаSelect Others in DEPARTMENT Field For House JobAnish ChibОценок пока нет
- Bharat Sanchar Nigam Limited (Website:) Application Form For Closure /surrender of TelephoneДокумент2 страницыBharat Sanchar Nigam Limited (Website:) Application Form For Closure /surrender of TelephoneAbhinavОценок пока нет
- Advertisement HJ 2020Документ3 страницыAdvertisement HJ 2020Anish ChibОценок пока нет
- Request Letter For Clarification and AmendmentДокумент4 страницыRequest Letter For Clarification and AmendmentAnish ChibОценок пока нет
- Corr Name CorrectionДокумент1 страницаCorr Name CorrectionAnish ChibОценок пока нет
- Show OrderДокумент2 страницыShow OrderAnish ChibОценок пока нет
- 4th ClassДокумент3 страницы4th ClassAnish ChibОценок пока нет
- Cancel Tender WebДокумент1 страницаCancel Tender WebAnish ChibОценок пока нет
- PolicyДокумент1 страницаPolicyAnish ChibОценок пока нет
- Right To Information Regulation of Fee and Cost Amendment Rules 2005 PDFДокумент1 страницаRight To Information Regulation of Fee and Cost Amendment Rules 2005 PDFAnish ChibОценок пока нет
- H 2Документ1 страницаH 2Anish ChibОценок пока нет
- N Citizen Charter Jan 2019Документ6 страницN Citizen Charter Jan 2019Anish ChibОценок пока нет
- Pension Papers for Issuance of PPOДокумент1 страницаPension Papers for Issuance of PPOAnish ChibОценок пока нет
- Policy For Watchlist and Defaulter List in GeMДокумент2 страницыPolicy For Watchlist and Defaulter List in GeMAnish ChibОценок пока нет
- H 3Документ1 страницаH 3Anish ChibОценок пока нет
- NounsiiiДокумент3 страницыNounsiiiAnish ChibОценок пока нет
- Right to Information Act 2005 GuideДокумент7 страницRight to Information Act 2005 GuideAnish ChibОценок пока нет
- CIC Appeal Procedure RulesДокумент4 страницыCIC Appeal Procedure RulesSardar. Vikramjit Singh RandhawaОценок пока нет
- M 1Документ1 страницаM 1Anish ChibОценок пока нет
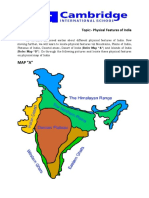
- As We Have Discussed Earlier About Different Physical Features IndiaДокумент1 страницаAs We Have Discussed Earlier About Different Physical Features IndiaAnish ChibОценок пока нет
- AirДокумент2 страницыAirAnish ChibОценок пока нет
- Grade IVДокумент2 страницыGrade IVAnish ChibОценок пока нет
- IGGDCJ2019Документ26 страницIGGDCJ2019Anish ChibОценок пока нет
- Globes and Maps Assignment IIДокумент4 страницыGlobes and Maps Assignment IIAnish ChibОценок пока нет
- Sanctioned Strength (Cadre Wise Breakup) No. of Vacancies (Cadre Wise Breakkup) Recruitment Rules (Service Wise/cadre Wise Breakup)Документ6 страницSanctioned Strength (Cadre Wise Breakup) No. of Vacancies (Cadre Wise Breakkup) Recruitment Rules (Service Wise/cadre Wise Breakup)Anish ChibОценок пока нет
- Screen Shots of BbdmsДокумент9 страницScreen Shots of BbdmsAnish ChibОценок пока нет
- SwingCalculator JavaДокумент1 страницаSwingCalculator JavaAnish ChibОценок пока нет
- Anna University CoimbatoreДокумент5 страницAnna University CoimbatorePreethi ArunОценок пока нет
- Pulsos cpm2cДокумент31 страницаPulsos cpm2cjlpallyzhotmail.esОценок пока нет
- 02 - NuMicro Architecture - CMSIS PDFДокумент42 страницы02 - NuMicro Architecture - CMSIS PDFThienОценок пока нет
- Datasheet - HK h8s2117r 4965249 PDFДокумент1 024 страницыDatasheet - HK h8s2117r 4965249 PDFt8126Оценок пока нет
- Interfacing Techniques Topic 4Документ23 страницыInterfacing Techniques Topic 4Jovel Jhon OpianaОценок пока нет
- Guide Datasheet NECДокумент226 страницGuide Datasheet NECvincentpessemesse0% (1)
- Chapter 2 - Architecture of ARM ProcessorДокумент43 страницыChapter 2 - Architecture of ARM Processor方勤Оценок пока нет
- SD75MA06BI ProfibusДокумент24 страницыSD75MA06BI ProfibusRafael SilvaОценок пока нет
- Mesa Motion ControllerДокумент2 страницыMesa Motion ControllerArvinder SinghОценок пока нет
- MK-120S User ManualДокумент306 страницMK-120S User ManualSagar PuvvulaОценок пока нет
- AN2655 LAN9252 SDK Firmware API Guide DS00002655AДокумент32 страницыAN2655 LAN9252 SDK Firmware API Guide DS00002655AchialiОценок пока нет
- Cha 1 Intro Architec 8086Документ39 страницCha 1 Intro Architec 8086dileepmk25Оценок пока нет
- Shopping Malls Security and Power Management System Using Ir1 - 2Документ57 страницShopping Malls Security and Power Management System Using Ir1 - 2Srivani Pulakala100% (6)
- CD 00158241Документ81 страницаCD 00158241hschoiОценок пока нет
- SM Device StatusДокумент67 страницSM Device StatusNutchaiSaengsurathamОценок пока нет
- William Stallings Computer Organization and Architecture 8 Edition Input/OutputДокумент65 страницWilliam Stallings Computer Organization and Architecture 8 Edition Input/OutputUmar IftikharОценок пока нет
- 5 82c55 Programmable Peripheral Interface1 PDFДокумент37 страниц5 82c55 Programmable Peripheral Interface1 PDFMotasim ShahinОценок пока нет
- Hosur Road, Bommanahalli, Bengaluru-560 068: The Oxford College of EngineeringДокумент2 страницыHosur Road, Bommanahalli, Bengaluru-560 068: The Oxford College of Engineering1232023Оценок пока нет
- GEH 6371 Unit Controller 2000VME (UC2000V) Operation and Maintenance PDFДокумент68 страницGEH 6371 Unit Controller 2000VME (UC2000V) Operation and Maintenance PDFmeirangong50% (2)
- Sh-2E Sh7055 F-Ztat™: Hitachi Superh Risc EngineДокумент926 страницSh-2E Sh7055 F-Ztat™: Hitachi Superh Risc Enginewtn2013100% (2)
- MPMC PDFДокумент210 страницMPMC PDFAnonymous TxxI4MTTОценок пока нет
- Osek Os: Session Speaker Deepak VДокумент60 страницOsek Os: Session Speaker Deepak VDaour DiopОценок пока нет
- 1kgf100840e 83SR04 R1411Документ15 страниц1kgf100840e 83SR04 R1411sa ltyОценок пока нет
- PCHTДокумент7 страницPCHTManikanda BalajiОценок пока нет
- CS 25000 Spring 2017 Final Practice SolutionsДокумент13 страницCS 25000 Spring 2017 Final Practice SolutionsTiger TangОценок пока нет
- Omron CJ1M Motion IntroductionДокумент76 страницOmron CJ1M Motion IntroductionMahadzir Bin Mat Rabi'Оценок пока нет
- MC68060 DatasheetДокумент416 страницMC68060 DatasheetBillОценок пока нет
- Basic Operational ConceptsДокумент29 страницBasic Operational ConceptsIndu BalakrishnanОценок пока нет
- ISO 14229 - Automotive Wiki - Négative - Response - ListДокумент7 страницISO 14229 - Automotive Wiki - Négative - Response - Listgreen_way26Оценок пока нет
- SoC - Lab ReportДокумент19 страницSoC - Lab ReportJuan VALVERDEОценок пока нет