Вам также может понравиться
- Diseño de Malla de Perforacion A Cielo AbierrtoДокумент39 страницDiseño de Malla de Perforacion A Cielo AbierrtoVan Persie Robin100% (2)
- Guía de Ejercicios Movimiento en Una DimensiónДокумент7 страницGuía de Ejercicios Movimiento en Una DimensiónsyliramОценок пока нет
- Xampp para LinuxДокумент7 страницXampp para LinuxFrancisco GómezОценок пока нет
- OtroДокумент27 страницOtrosusana montero javierОценок пока нет
- Que Es Un MacroДокумент8 страницQue Es Un MacroDanid TapiasОценок пока нет
- 2021 590-125 Sistemas Electrotécnicos y Automáticos-1Документ10 страниц2021 590-125 Sistemas Electrotécnicos y Automáticos-1Alfonso Martos TorresОценок пока нет
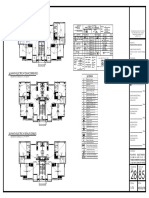
- Diseno Electrico Por ApartamentoДокумент1 страницаDiseno Electrico Por Apartamentooscar moreno loraОценок пока нет
- Check List Equipo de Levante - MontacargasДокумент2 страницыCheck List Equipo de Levante - MontacargasJorge LujanОценок пока нет
- Docsity Procedimiento de Trabajo SeguroДокумент9 страницDocsity Procedimiento de Trabajo SeguroPaula MorenoОценок пока нет
- Auditorias de Seguridad VialДокумент206 страницAuditorias de Seguridad VialRaul Alberto Peniche Mendoza100% (8)
- Presentacion-1.1 Resistencia Al FuegoДокумент71 страницаPresentacion-1.1 Resistencia Al Fuegouniramirez100% (1)
- Embragues y FrenosДокумент9 страницEmbragues y FrenoscadilacОценок пока нет
- TF Edificios Grupo7Документ162 страницыTF Edificios Grupo7MERLY JOAMELY PEÑA HUERTASОценок пока нет
- Taller#05 (CINEMATICA DEL MOVIMIENTO DE ROTACION)Документ38 страницTaller#05 (CINEMATICA DEL MOVIMIENTO DE ROTACION)Nicole BelénОценок пока нет
- Resumen Mecanismo Físico de EbulliciónДокумент2 страницыResumen Mecanismo Físico de EbulliciónWilTolosaОценок пока нет
- Ram 700 Modelo 2018Документ1 страницаRam 700 Modelo 2018GermaInc MendozaОценок пока нет
- Fichas 2Документ4 страницыFichas 2MegumiTrancyОценок пока нет
- Solucionario de Ejercicios de Termodinámica Sustancia Pura PDFДокумент7 страницSolucionario de Ejercicios de Termodinámica Sustancia Pura PDFCarlos ZentenoОценок пока нет
- Dec de Cumplimiento Rav 108Документ18 страницDec de Cumplimiento Rav 108Orlando MuñozОценок пока нет
- Tema 3 AcústicaДокумент4 страницыTema 3 AcústicaLaura RuizОценок пока нет
- El Material Handling Institute Definió 10 Principios de Manejo de MaterialДокумент7 страницEl Material Handling Institute Definió 10 Principios de Manejo de MaterialDavid HerreraОценок пока нет
- NT935 Ed16 R1.7 EsДокумент30 страницNT935 Ed16 R1.7 EsAbraham TorresОценок пока нет
- Guía Técnica ColombianaДокумент5 страницGuía Técnica Colombianamarcela jimenezОценок пока нет
- 3º Informe NChs 1117 y 1239Документ14 страниц3º Informe NChs 1117 y 1239Marcel Contreras0% (1)
- Laboratorio N 4Документ21 страницаLaboratorio N 4Martin Eduardo Cruz RosalesОценок пока нет
- PFC Anexo 2Документ210 страницPFC Anexo 2jefferson77valienteОценок пока нет
- Cald. Ferroli Domiproject D, Calderas MuralesДокумент2 страницыCald. Ferroli Domiproject D, Calderas MuraleslilymaulenОценок пока нет
- Iperc Linea Base de IzajeДокумент8 страницIperc Linea Base de IzajeRaulОценок пока нет
- Analisis Cerchas 3DДокумент5 страницAnalisis Cerchas 3DJorge Mariio DiiAzОценок пока нет