Вам также может понравиться
- AsconДокумент21 страницаAsconDaniel Alejandro OrozcoОценок пока нет
- RC Servo Motor Control Using LPC2148 MicrocontrollerДокумент12 страницRC Servo Motor Control Using LPC2148 Microcontrollersameer khanОценок пока нет
- Automatic Ventilation SystemДокумент69 страницAutomatic Ventilation SystemGurram SaiTejaОценок пока нет
- Feedbacks in Hydraulic Servo Systems RydbergДокумент21 страницаFeedbacks in Hydraulic Servo Systems Rydbergc1ronОценок пока нет
- ARM HOW-TO GUIDE: Interfacing Zigbee with LPC2148Документ14 страницARM HOW-TO GUIDE: Interfacing Zigbee with LPC2148goutham457Оценок пока нет
- Hidraulic Servovalve SystemДокумент111 страницHidraulic Servovalve SystemJc MenjívarОценок пока нет
- N121-132A Servocontroller Power Supply SpecsДокумент6 страницN121-132A Servocontroller Power Supply Specsnm2007kОценок пока нет
- IR Sensor Detects ObstaclesДокумент12 страницIR Sensor Detects ObstaclesRavi RajanОценок пока нет
- Interfacing LED Switch With LPC2148 PTK-26-9-21Документ13 страницInterfacing LED Switch With LPC2148 PTK-26-9-21ADITYA MENDHEОценок пока нет
- Difinition of Load SensingДокумент16 страницDifinition of Load SensingMahmmod Al-QawasmehОценок пока нет
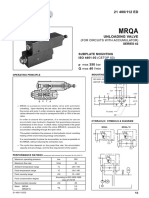
- Accumulator Unloading Valve, Type MRQAДокумент2 страницыAccumulator Unloading Valve, Type MRQALibinОценок пока нет
- Study ARM Evaluation SystemДокумент89 страницStudy ARM Evaluation Systemphani_abkОценок пока нет
- AUTOSAR SWS FlexRayARTransportLayerДокумент101 страницаAUTOSAR SWS FlexRayARTransportLayerStefan RuscanuОценок пока нет
- SMD-DatasheetДокумент8 страницSMD-DatasheetAhmed Sherif CupoОценок пока нет
- High Precision Position Control of Electro-Hydraulic Servo SystemДокумент10 страницHigh Precision Position Control of Electro-Hydraulic Servo Systemamin342Оценок пока нет
- Shuttle Valves: Catalog HY15-3502/USДокумент17 страницShuttle Valves: Catalog HY15-3502/USPartsGopher.comОценок пока нет
- MJoy 16 C 1Документ2 страницыMJoy 16 C 1Edilberto SantosОценок пока нет
- Moog G122-829A DS A4 v2Документ4 страницыMoog G122-829A DS A4 v2Hammad AshrafОценок пока нет
- SpeДокумент12 страницSpeseaqu3stОценок пока нет
- LPC2148 Interrupt TutorialДокумент13 страницLPC2148 Interrupt TutorialSomil N SwarnaОценок пока нет
- Servo ValveДокумент7 страницServo Valveapi-348629909Оценок пока нет
- UART in LPC2148 ARM7 MicrocontrollerДокумент8 страницUART in LPC2148 ARM7 Microcontrollerrudra_1Оценок пока нет
- Interfacing LPC2148 With GLCD.Документ3 страницыInterfacing LPC2148 With GLCD.Bhavin R DarjiОценок пока нет
- Moog Pumps RKP Catalog en PDFДокумент81 страницаMoog Pumps RKP Catalog en PDFJosé Soares100% (1)
- ME4803 Motion Control: The Strengths and Design of Fluid Power SystemsДокумент36 страницME4803 Motion Control: The Strengths and Design of Fluid Power SystemssayproОценок пока нет
- Modeling Intro to EH SystemsДокумент62 страницыModeling Intro to EH SystemsAhmedОценок пока нет
- Electro-Hydraulics, Basic LevelДокумент202 страницыElectro-Hydraulics, Basic Levelreza-ab100% (1)
- DNB CT Analyzer User ManualДокумент154 страницыDNB CT Analyzer User ManualSaid WahdanОценок пока нет
- LogixPro Lab edited by Jim Gulledge Georgia Quick Start GDTAE PLC simulationДокумент7 страницLogixPro Lab edited by Jim Gulledge Georgia Quick Start GDTAE PLC simulationRoca E. WilberОценок пока нет
- Proportional Control Valves with Integrated 24 Volt ElectronicsДокумент24 страницыProportional Control Valves with Integrated 24 Volt ElectronicsLuis Alberto RamosОценок пока нет
- Teves 20 GI ABS Electrical TestДокумент18 страницTeves 20 GI ABS Electrical TestNick PОценок пока нет
- Argus ManualДокумент62 страницыArgus ManualSandro VargasОценок пока нет
- Group 3 Pilot Circuit: RCV Pedal Remote Control Valve (LH Lever) Remote Control Valve (RH Lever)Документ8 страницGroup 3 Pilot Circuit: RCV Pedal Remote Control Valve (LH Lever) Remote Control Valve (RH Lever)thierrylindoОценок пока нет
- Maintenance Manual ABS AraucaДокумент39 страницMaintenance Manual ABS AraucaJeyson GonzalezОценок пока нет
- PLC Stepper Motor ControllerДокумент12 страницPLC Stepper Motor ControllerSibtain Ul Hassan100% (1)
- Transmision 0BW HybridFWDДокумент171 страницаTransmision 0BW HybridFWDRoberto Garcia GodoyОценок пока нет
- Interfacing Stepper Motor With LPC2148 Arm7Документ8 страницInterfacing Stepper Motor With LPC2148 Arm7Ravi RajanОценок пока нет
- AN3156 Application Note: USB DFU Protocol Used in The STM32 BootloaderДокумент23 страницыAN3156 Application Note: USB DFU Protocol Used in The STM32 BootloaderpravsaieenОценок пока нет
- 9056 Vocational Axles BrochureДокумент18 страниц9056 Vocational Axles BrochureAbdelhamid HaramiОценок пока нет
- Fast Forw Ard, Manual Op Manual Op - Feed ValveДокумент3 страницыFast Forw Ard, Manual Op Manual Op - Feed ValveA Ramos GabyОценок пока нет
- Closed Loop Control Systems ExplainedДокумент33 страницыClosed Loop Control Systems ExplainedSgsksbskxvxk100% (1)
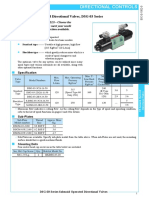
- 2-Latest EIC-E-1002-0 (DSG-03 Series Solenoid Operated Directional Valves)Документ12 страниц2-Latest EIC-E-1002-0 (DSG-03 Series Solenoid Operated Directional Valves)Sujeet KumarОценок пока нет
- Ge VFD MotorsДокумент33 страницыGe VFD Motorssanjay.gawadeОценок пока нет
- Moog G122-829-001 - Catalog1Документ2 страницыMoog G122-829-001 - Catalog1Jean-Roch JacquesОценок пока нет
- Canbus DtasheetДокумент22 страницыCanbus Dtasheetsefa7171Оценок пока нет
- Atos - Modular Relief Valve - HMP HM KMДокумент4 страницыAtos - Modular Relief Valve - HMP HM KMClaudecir PereiraОценок пока нет
- Moog D633Документ16 страницMoog D633Balu M100% (1)
- DesignRules For HighDampingДокумент8 страницDesignRules For HighDampingRajesh MalikОценок пока нет
- Culligan HiFlo2 - Parts ListДокумент10 страницCulligan HiFlo2 - Parts ListintermountainwaterОценок пока нет
- Flow Control ManifoldsДокумент4 страницыFlow Control ManifoldsBrayan AguileraОценок пока нет
- Eco490n - enДокумент20 страницEco490n - enVictor VargasОценок пока нет
- Ford AODДокумент10 страницFord AODMohammed MochrifОценок пока нет
- Lenntech APP Pump Data SheetДокумент12 страницLenntech APP Pump Data SheetilieoniciucОценок пока нет
- Interfacing A Stepper Motor With ARM Controller LPC2148Документ9 страницInterfacing A Stepper Motor With ARM Controller LPC2148Rahul Sharma100% (2)
- Servo Solenoid ValvesДокумент204 страницыServo Solenoid Valveschandushar1604100% (1)
- USC PESC04 PHIL Power Interface Final PDFДокумент5 страницUSC PESC04 PHIL Power Interface Final PDFMalik MilakОценок пока нет
- Software Phase Locked LoopДокумент7 страницSoftware Phase Locked LoopBinyam YohannesОценок пока нет
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesДокумент14 страницPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeОценок пока нет
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsДокумент9 страницUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngОценок пока нет
- Wcecs2009 - pp545-549 Computer LoadsДокумент5 страницWcecs2009 - pp545-549 Computer LoadsYogesh MsdОценок пока нет
- Phan Co KhiДокумент40 страницPhan Co KhisayproОценок пока нет
- cấu trúc đảo ngữДокумент3 страницыcấu trúc đảo ngữsayproОценок пока нет
- ME4803 Motion Control: The Strengths and Design of Fluid Power SystemsДокумент36 страницME4803 Motion Control: The Strengths and Design of Fluid Power SystemssayproОценок пока нет
- Spring ForceДокумент1 страницаSpring ForcesayproОценок пока нет
- Accurate Time-Domain Simulation of Nonlinear Inductors Including Hysteresis and Eddy Current EffectsДокумент6 страницAccurate Time-Domain Simulation of Nonlinear Inductors Including Hysteresis and Eddy Current EffectssayproОценок пока нет
- Hydraulic Proportional Closed Loop System Design PDFДокумент86 страницHydraulic Proportional Closed Loop System Design PDFragdapattice100% (7)
- Modelling A Linear and Limited Travel SolenoidДокумент6 страницModelling A Linear and Limited Travel SolenoidsayproОценок пока нет
- Dynamic Design of Hydraulic Pressure Control Valve of Active Suspension System Using Experimental MethodДокумент6 страницDynamic Design of Hydraulic Pressure Control Valve of Active Suspension System Using Experimental MethodsayproОценок пока нет
- Modeling of A Pressure Reducing Valve Actuator For Automotive ApplicationsДокумент6 страницModeling of A Pressure Reducing Valve Actuator For Automotive ApplicationssayproОценок пока нет
- Good-Comparison of Friction Models Applied To A Control ValveДокумент13 страницGood-Comparison of Friction Models Applied To A Control ValvesayproОценок пока нет
- Finite Element Analysis of Ionic-Conducting Polymer Using Flimen-IMECS2009 - pp2123-2128Документ6 страницFinite Element Analysis of Ionic-Conducting Polymer Using Flimen-IMECS2009 - pp2123-2128sayproОценок пока нет
- Phan Co KhiДокумент40 страницPhan Co KhisayproОценок пока нет
- E1000 User ManualДокумент119 страницE1000 User ManualMárcio Fernandes78% (9)
- Chapter 5 Image Restoration - 01Документ37 страницChapter 5 Image Restoration - 01Aman Ahmad SiddiqueeОценок пока нет
- Simple open-source seismic data processing system SeaSeisДокумент2 страницыSimple open-source seismic data processing system SeaSeisAjay PundirОценок пока нет
- Linear ConvolutionДокумент17 страницLinear ConvolutionRahul DeshpandeОценок пока нет
- Performance Analysis of OFDM, FBMC, UFMC (5G Physical Layer)Документ16 страницPerformance Analysis of OFDM, FBMC, UFMC (5G Physical Layer)Ahmed HamanОценок пока нет
- Disomat Tersus: Instruction ManualДокумент268 страницDisomat Tersus: Instruction ManualMohamed Hamad100% (1)
- NoiseTemp HelpfileДокумент4 страницыNoiseTemp HelpfilemortizОценок пока нет
- Department of Electrical Engineering Analogue and Digital CommunicationДокумент11 страницDepartment of Electrical Engineering Analogue and Digital CommunicationZubair KhalidОценок пока нет
- A Tunable Optical Waveguide Ring Resonator For Microwave Photonic FilteringДокумент4 страницыA Tunable Optical Waveguide Ring Resonator For Microwave Photonic FilteringRoberth Andres Martinez AlzateОценок пока нет
- Deber+No.+2+para+la+Segunda+Evaluaci%C3%B3nДокумент5 страницDeber+No.+2+para+la+Segunda+Evaluaci%C3%B3nJoseph GuerreroОценок пока нет
- Whitepaper Tobii Pro I-VT Fixation FilterДокумент21 страницаWhitepaper Tobii Pro I-VT Fixation FilterAlexOO7Оценок пока нет
- PEEII Lab ManualДокумент61 страницаPEEII Lab Manualmichaeld366Оценок пока нет
- DSD Syllabus KtuДокумент1 страницаDSD Syllabus KtuAjОценок пока нет
- The Dynamics of Aggregate Planning: Production Planning and Control September 2003Документ33 страницыThe Dynamics of Aggregate Planning: Production Planning and Control September 2003Mỹ Lệ Nguyễn ThịОценок пока нет
- IMagic Service ManualДокумент125 страницIMagic Service ManualJackson Njaramba100% (1)
- Dattorro - 1997 - Effect Design. Part 1 Reverberator and Other Filters PDFДокумент25 страницDattorro - 1997 - Effect Design. Part 1 Reverberator and Other Filters PDFJooОценок пока нет
- LGE Internal Use Only Only For Training and Service PurposesДокумент208 страницLGE Internal Use Only Only For Training and Service PurposesHenry TamayoОценок пока нет
- Audio Noise Removal Via MatlabДокумент17 страницAudio Noise Removal Via MatlabkeennОценок пока нет
- Ece V Analog Communication (10ec53) NotesДокумент73 страницыEce V Analog Communication (10ec53) NotesNithindev GuttikondaОценок пока нет
- TRIX - Triple Exponential Smoothing Oscillator by Jack K. HutsonДокумент4 страницыTRIX - Triple Exponential Smoothing Oscillator by Jack K. HutsonPedro MelloОценок пока нет
- Digital Signal Processing - DR - Prarthan MehtaДокумент61 страницаDigital Signal Processing - DR - Prarthan MehtapkumarmysОценок пока нет
- WINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-IДокумент35 страницWINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-Ipadm kesavОценок пока нет
- Digital Voice RecorderДокумент4 страницыDigital Voice RecorderSrishti SakshiОценок пока нет
- Tesla PatentДокумент12 страницTesla PatentCharles GrossОценок пока нет
- All Pass Filter DesignДокумент2 страницыAll Pass Filter Designnivia25Оценок пока нет
- Questions & Answers On Filters and AttenuatorsДокумент42 страницыQuestions & Answers On Filters and Attenuatorskibrom atsbha100% (3)
- Advanced Electronics Instrumentation MTEC-502-BДокумент6 страницAdvanced Electronics Instrumentation MTEC-502-BAnish BansalОценок пока нет
- A DSP-Based Digital IF AM/FM Car-Radio ReceiverДокумент4 страницыA DSP-Based Digital IF AM/FM Car-Radio ReceiverbmnaveenОценок пока нет
- CNT 85 ManualДокумент124 страницыCNT 85 ManualMichael DixonОценок пока нет
- Complex Modulation BasicsДокумент69 страницComplex Modulation BasicsKashif VirkОценок пока нет