Вам также может понравиться
- Robótica Aplicada A La Ingenieria MecánicaДокумент12 страницRobótica Aplicada A La Ingenieria MecánicaJonathan VenturaОценок пока нет
- S3.UNIDAD II - Solucion de Problemas Estructuras SecuencialesДокумент4 страницыS3.UNIDAD II - Solucion de Problemas Estructuras SecuencialesEmmanuel Taborda VОценок пока нет
- Metodologia de ChecklandДокумент4 страницыMetodologia de Checklandhacker_joshuaОценок пока нет
- 1er Examen de ElectroneumaticaДокумент44 страницы1er Examen de ElectroneumaticaSergio RomeroОценок пока нет
- Eliminacion de GaussДокумент9 страницEliminacion de GaussOscar Soto CedeñoОценок пока нет
- Etica Trabajo y ProfesionДокумент15 страницEtica Trabajo y ProfesionWilser NeyraОценок пока нет
- Tippens Fisica 7e Diapositivas 06aДокумент61 страницаTippens Fisica 7e Diapositivas 06aFernando alcarraz valerio100% (1)
- Informe MinisumoДокумент27 страницInforme MinisumoDiego RamirezОценок пока нет
- Cuadro Comparativo Estilos ArquitectónicosДокумент4 страницыCuadro Comparativo Estilos ArquitectónicosSergio TejadaОценок пока нет
- Ejercicios Del LibroДокумент2 страницыEjercicios Del LibroSamir HuarinoОценок пока нет
- Parcial 3 Teorico Redes de ComputadorasДокумент6 страницParcial 3 Teorico Redes de ComputadorasNelson PimentelОценок пока нет
- Trabajo FinalДокумент91 страницаTrabajo FinalRAZIEL ISAAC TORRES SIFUENTESОценок пока нет
- 1.5 Propagacion de ErrorДокумент20 страниц1.5 Propagacion de Erroranju139221Оценок пока нет
- Estructura de Control Diagramas de FlujoДокумент6 страницEstructura de Control Diagramas de FlujoRamon Ramirez0% (2)
- Clasificación y Estructura de Los Tipos de Sistemas Operativos.Документ14 страницClasificación y Estructura de Los Tipos de Sistemas Operativos.Javier MewloCxОценок пока нет
- Manual de Cosimir PDFДокумент37 страницManual de Cosimir PDFManuel Ruiz RondoОценок пока нет
- Sistemas Mecánicos IIДокумент17 страницSistemas Mecánicos IIFlavioОценок пока нет
- Resumen Del Tema Algoritmos de BusquedaДокумент3 страницыResumen Del Tema Algoritmos de BusquedaArisneth Chanapí GОценок пока нет
- Simbolos de Las ToleranciasДокумент13 страницSimbolos de Las ToleranciasRonОценок пока нет
- Investigar El Funcionamiento de Cada Una de Las Herramienta de La Pestaña de Dibujo 2D de AutoCAD - Lander OrtizДокумент9 страницInvestigar El Funcionamiento de Cada Una de Las Herramienta de La Pestaña de Dibujo 2D de AutoCAD - Lander OrtizLuis IzaОценок пока нет
- Comandos de CMDДокумент20 страницComandos de CMDMi TrabajoОценок пока нет
- Pregunta3 JДокумент7 страницPregunta3 JAlex OrtegaОценок пока нет
- Cuestionario # 3 - Parcial 2Документ3 страницыCuestionario # 3 - Parcial 2Keviin AC50% (2)
- Modelos de Ingeniería, Ventajas y DesventajasДокумент9 страницModelos de Ingeniería, Ventajas y DesventajasKenia OoGaОценок пока нет
- Cuadernillo M Industrial M2S1Документ43 страницыCuadernillo M Industrial M2S1RODOLFO REYESОценок пока нет
- Resumen HidraulicaДокумент5 страницResumen HidraulicaFrancisco Silva Pizarro0% (1)
- Técnica y Métodos - Eda N°1 - Trabajo N°1 - Denilson-1Документ1 страницаTécnica y Métodos - Eda N°1 - Trabajo N°1 - Denilson-1Denilson aldair Espinoza medinaОценок пока нет
- Dibujo TrabajofinalДокумент4 страницыDibujo Trabajofinaljack calderon bautistaОценок пока нет
- Introducción Simulación TráficoДокумент7 страницIntroducción Simulación Tráficojames__lakeОценок пока нет
- P2 U1 Caso Ayuntamiento ProgresoДокумент2 страницыP2 U1 Caso Ayuntamiento ProgresoJesus Fernando Galera QuijanoОценок пока нет
- Metodología para La Solución de Problemas Basados en Computadora.Документ12 страницMetodología para La Solución de Problemas Basados en Computadora.Monse100% (1)
- Cuadro ComparativoДокумент7 страницCuadro ComparativoJonathan Manoatl100% (1)
- La Electricidad - Simbologia Americana y EuropeaДокумент6 страницLa Electricidad - Simbologia Americana y EuropeaDALIA ROXANA MARTINEZ SALGADOОценок пока нет
- Reporte Del Puente HДокумент3 страницыReporte Del Puente HManuel DSaarabio100% (1)
- Foda MecatronicaДокумент1 страницаFoda MecatronicaJose Mendoza LabastidaОценок пока нет
- Programacion Modular. Funciones en C ConДокумент27 страницProgramacion Modular. Funciones en C ConDomingo Lizana ChaucaОценок пока нет
- Seguidor de LineaДокумент11 страницSeguidor de LineaCristian YánezОценок пока нет
- Cinematica TAREA 3Документ8 страницCinematica TAREA 3Edgar Castillo DelgadoОценок пока нет
- 2.2 Finalidad de La OperacionДокумент12 страниц2.2 Finalidad de La OperacionAdriel MoralesОценок пока нет
- Quine McCluskeyДокумент4 страницыQuine McCluskeygaboland11Оценок пока нет
- Aplicacion en MATLAB y SIMULINK PDFДокумент6 страницAplicacion en MATLAB y SIMULINK PDFchase200385Оценок пока нет
- Conceptos Principales Del Paradigma de POOДокумент4 страницыConceptos Principales Del Paradigma de POOvictormontalvo10Оценок пока нет
- Mapa Conceptual de LaplaceДокумент1 страницаMapa Conceptual de Laplacecarlos alberto espinal bedoyaОценок пока нет
- Clases Del Paquete Java - LangДокумент3 страницыClases Del Paquete Java - LangPicis Leo VeLaОценок пока нет
- Concepto de Momento de Una FuerzaДокумент13 страницConcepto de Momento de Una FuerzaRicardo MartinezОценок пока нет
- Evaluación Segundo ParcialДокумент2 страницыEvaluación Segundo ParcialdrnacatoОценок пока нет
- Registros Del 8088Документ7 страницRegistros Del 8088José ArturoОценок пока нет
- GUIA-Dibujo Normalizado de Piezas MecanicasДокумент17 страницGUIA-Dibujo Normalizado de Piezas MecanicasDavid Luis80% (5)
- Ficha Tecnica FastДокумент2 страницыFicha Tecnica FastCarolina Flores Calixto100% (1)
- 5a Iind 5995 Investigacion Documental Electronica Digital y AnalogaДокумент39 страниц5a Iind 5995 Investigacion Documental Electronica Digital y AnalogaDaniel Reyes100% (1)
- 3 - Geometría AnalíticaДокумент72 страницы3 - Geometría AnalíticaRené Domingo Franco Pedraza50% (2)
- 2.3 Configuración de Los Puertos Locales en Las ComputadorasДокумент3 страницы2.3 Configuración de Los Puertos Locales en Las ComputadorasBrendaОценок пока нет
- AyLp Unidad 2 Tema 2.1 y 2.2Документ4 страницыAyLp Unidad 2 Tema 2.1 y 2.2rogelioОценок пока нет
- Cuestionario de Ingeniería ConcurrenteДокумент2 страницыCuestionario de Ingeniería ConcurrenteJose TorneОценок пока нет
- Actividad 8samantaДокумент3 страницыActividad 8samantaSamanta Gabriela Velazquez EstradaОценок пока нет
- Limitaciones MecanicasДокумент58 страницLimitaciones MecanicasDdrr KarloOzz50% (2)
- Hibridación y Geometría MolecularДокумент9 страницHibridación y Geometría Molecularcarlos martinezОценок пока нет
- NievasДокумент5 страницNievasLuciano PerezОценок пока нет
- Evasion de ObstaculosДокумент9 страницEvasion de Obstaculospr_alejОценок пока нет
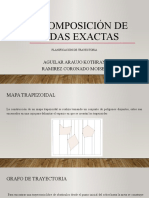
- Descomposición de Celdas ExactasДокумент7 страницDescomposición de Celdas ExactasMoises RamirezОценок пока нет
- Example 2Документ2 страницыExample 2Iván DelgadoОценок пока нет
- Taller 1 CriДокумент2 страницыTaller 1 CriIván DelgadoОценок пока нет
- Articles-74968 Recurso 5Документ20 страницArticles-74968 Recurso 5Diana ArenasОценок пока нет
- Apuntes Metodos Numericos Sistema de Ecuaciones No LinealesДокумент30 страницApuntes Metodos Numericos Sistema de Ecuaciones No LinealesCris TurínОценок пока нет
- Instalacion Scikit-LearnДокумент1 страницаInstalacion Scikit-LearnIván DelgadoОценок пока нет
- Transmision DigitalДокумент1 страницаTransmision DigitalIván DelgadoОценок пока нет
- Delimitar Un Archivo Con ComasДокумент1 страницаDelimitar Un Archivo Con ComasIván DelgadoОценок пока нет
- Conexión de Wólfram Con PythonДокумент3 страницыConexión de Wólfram Con PythonIván DelgadoОценок пока нет
- Pasos Validacion Garantia AcerДокумент3 страницыPasos Validacion Garantia AcerIván DelgadoОценок пока нет
- Tarea InglesДокумент9 страницTarea InglesIván DelgadoОценок пока нет
- Programacion BinariaДокумент14 страницProgramacion BinariaLeonel MonroyОценок пока нет
- Instruct I Vogl PKДокумент21 страницаInstruct I Vogl PKvictordrhОценок пока нет
- NotasДокумент1 страницаNotasIván DelgadoОценок пока нет
- Tarea InglesДокумент9 страницTarea InglesIván DelgadoОценок пока нет
- Alcaldía Local de Sumapaz - Superamos La Segregación y DiscriminaciónДокумент3 страницыAlcaldía Local de Sumapaz - Superamos La Segregación y DiscriminaciónIván DelgadoОценок пока нет
- Parque Nacional Sum A PazДокумент216 страницParque Nacional Sum A PazIván DelgadoОценок пока нет
- Hora RiosДокумент11 страницHora RiosIván DelgadoОценок пока нет
- Opciones Proyecto FinalДокумент1 страницаOpciones Proyecto FinalIván DelgadoОценок пока нет
- Hoja Tecnica Del JuegoДокумент2 страницыHoja Tecnica Del JuegoIván DelgadoОценок пока нет
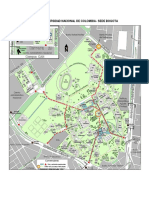
- Mapa General Universidad NacionalДокумент2 страницыMapa General Universidad NacionalIván DelgadoОценок пока нет
- Introprog MatlabДокумент6 страницIntroprog MatlabPablo Cesar Huanca AlvarezОценок пока нет
- 17 ObjsДокумент2 страницы17 ObjsIván DelgadoОценок пока нет
- 17 ObjsДокумент2 страницы17 ObjsIván DelgadoОценок пока нет
- Parte 3Документ20 страницParte 3Alfredo HernandezОценок пока нет
- Planteamiento Del ProblemaДокумент2 страницыPlanteamiento Del ProblemaIván DelgadoОценок пока нет
- Papeles para Realizar La InscripcionДокумент3 страницыPapeles para Realizar La InscripcionIván DelgadoОценок пока нет
- Clase 2 Introduccion A La NeumaticaДокумент51 страницаClase 2 Introduccion A La NeumaticaIván Delgado100% (1)
- Taller 1 de ControlДокумент2 страницыTaller 1 de ControlIván DelgadoОценок пока нет
- Ficha BibliograficaДокумент6 страницFicha BibliograficaIván Delgado100% (1)
- Introduccion Modulacion FMДокумент1 страницаIntroduccion Modulacion FMIván DelgadoОценок пока нет
- Gabriela MacancelaДокумент23 страницыGabriela MacancelaEmanuel Arcos Coronel100% (1)
- Guias Español 3 Periodo DanielДокумент34 страницыGuias Español 3 Periodo DanielAlvaro Jose PerezОценок пока нет
- Importancia de La Epistemología en La EducaciónДокумент9 страницImportancia de La Epistemología en La Educaciónherkike01Оценок пока нет
- ¿ Qué Es La Comprensión Lectora? - EjemplosДокумент3 страницы¿ Qué Es La Comprensión Lectora? - EjemplosProfesora Natalia ValdésОценок пока нет
- Sesion 3 Origen AutoestimaДокумент5 страницSesion 3 Origen AutoestimaWylly GuevaraОценок пока нет
- Normas Basicas para Redaccion, Ortografia y Puntuacion. Unidad IIДокумент22 страницыNormas Basicas para Redaccion, Ortografia y Puntuacion. Unidad IILuis Castro100% (1)
- Proyecto de Vida Clase 1Документ10 страницProyecto de Vida Clase 1LUISJOTA2Оценок пока нет
- Qué Es Una OraciónДокумент7 страницQué Es Una Oraciónpilirodriguez206Оценок пока нет
- Gabbard G 2002 Psiquiatria Psicodinamica en La Practica ClinicaДокумент6 страницGabbard G 2002 Psiquiatria Psicodinamica en La Practica Clinicadaniela_barrios_93Оценок пока нет
- Ejemplo Perfil de InvestigacionДокумент7 страницEjemplo Perfil de InvestigacionDiego Castañares Yapur100% (1)
- Terapia de AprendizajeДокумент11 страницTerapia de AprendizajemartekorinaОценок пока нет
- TrecДокумент12 страницTrecAnabel Quilligana0% (1)
- Arcaismo en El EspanolДокумент8 страницArcaismo en El EspanolAngel RiveraОценок пока нет
- Nueva Visita A La Filosofía Del Derecho en La Argentina - Manuel AtiezaДокумент22 страницыNueva Visita A La Filosofía Del Derecho en La Argentina - Manuel AtiezaAndrewMartínezОценок пока нет
- Test Guestáltico Visomotor de BenderДокумент8 страницTest Guestáltico Visomotor de BenderYelfry RamosОценок пока нет
- Ejemplo de Proyecto 5to GradoДокумент7 страницEjemplo de Proyecto 5to Gradodanielagre1965colligОценок пока нет
- Discapacidad IntelectualДокумент6 страницDiscapacidad IntelectualRocío CuervoОценок пока нет
- GUIDE No.1 Fourth Term Regular Verbs-Simple Past Tense 3Документ6 страницGUIDE No.1 Fourth Term Regular Verbs-Simple Past Tense 3RAMIREZ REYES ESTEBAN DAVID RAMIREZ REYES ESTEBAN DAVIDОценок пока нет
- Clase Adultos 3Документ9 страницClase Adultos 3Daniela Pereira SepúlvedaОценок пока нет
- Trabajo Lenguaje 3Документ13 страницTrabajo Lenguaje 3Carlos RieraОценок пока нет
- Entrenamiento de Habilidades Sociales en Fobia SocialДокумент27 страницEntrenamiento de Habilidades Sociales en Fobia SocialAaron Ponce Silva100% (1)
- 6 Informe Psicotecnico 1Документ11 страниц6 Informe Psicotecnico 1Maria Del Carmen VirgiliОценок пока нет
- 29 113 1 PBДокумент19 страниц29 113 1 PBEvelyn SalazarОценок пока нет
- Para Qué Sirve La Filosofía Del DerechoДокумент2 страницыPara Qué Sirve La Filosofía Del Derechocarmen mercedes qquesihuallpa de la sotaОценок пока нет
- Material Complementario DUA en Educación Superior PDFДокумент103 страницыMaterial Complementario DUA en Educación Superior PDFJeimy Vargas CordovaОценок пока нет
- Su StratosДокумент12 страницSu StratosGerardo DenadaОценок пока нет
- Perspectivas de La Ciencia Escolar / Claudio Piatti MartínezДокумент5 страницPerspectivas de La Ciencia Escolar / Claudio Piatti Martínezrodolfo_prat_1Оценок пока нет
- Marco Buena EnseñanzaДокумент20 страницMarco Buena EnseñanzaAndrea WalkerОценок пока нет
- Memorias Una 2005 PsicoДокумент344 страницыMemorias Una 2005 PsicoLalau AlfaroОценок пока нет
- Cassier - Heidegger Davos 1929Документ30 страницCassier - Heidegger Davos 1929luiscalder100% (1)