Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Weather Prediction Using Machine Learning TechniquessДокумент53 страницыWeather Prediction Using Machine Learning Techniquessbakiz89Оценок пока нет
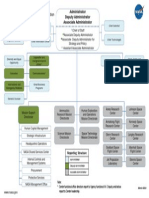
- NASA Org ChartДокумент1 страницаNASA Org ChartprasaddugadОценок пока нет
- Essay Guidelines and SamplesДокумент23 страницыEssay Guidelines and SamplesprasaddugadОценок пока нет
- Autonomous BipedДокумент30 страницAutonomous BipedprasaddugadОценок пока нет
- Issue Topics PDFДокумент26 страницIssue Topics PDFVishesh Gunner RaimugiaОценок пока нет
- Argument TopicsДокумент59 страницArgument TopicsRamchandra KasapuramОценок пока нет
- Autonomous Biped With Self Maneuvering AbilityДокумент14 страницAutonomous Biped With Self Maneuvering AbilityprasaddugadОценок пока нет
- Autonomous Biped With Self Maneuvering AbilityДокумент14 страницAutonomous Biped With Self Maneuvering AbilityprasaddugadОценок пока нет
- Autonomous Biped With Self Maneuvering AbilityДокумент14 страницAutonomous Biped With Self Maneuvering AbilityprasaddugadОценок пока нет
- MODULE 8. Ceiling WorksДокумент2 страницыMODULE 8. Ceiling WorksAj MacalinaoОценок пока нет
- Industrial RevolutionДокумент2 страницыIndustrial RevolutionDiana MariaОценок пока нет
- 555 TimerДокумент25 страниц555 TimerDr-Muhammad Aqeel AslamОценок пока нет
- Imaging Anatomy Brain and Spine Osborn 1 Ed 2020 PDFДокумент3 130 страницImaging Anatomy Brain and Spine Osborn 1 Ed 2020 PDFthe gaangster100% (1)
- Rizal Noli Me TangereДокумент35 страницRizal Noli Me TangereKristine Cantilero100% (2)
- Auditing Theory Auditing in A Computer Information Systems (Cis) EnvironmentДокумент32 страницыAuditing Theory Auditing in A Computer Information Systems (Cis) EnvironmentMajoy BantocОценок пока нет
- Dosificación Gac007-008 Sem2Документ2 страницыDosificación Gac007-008 Sem2Ohm EgaОценок пока нет
- The Path Vol 9 - William JudgeДокумент472 страницыThe Path Vol 9 - William JudgeMark R. JaquaОценок пока нет
- Btech CertificatesДокумент6 страницBtech CertificatesSuresh VadlamudiОценок пока нет
- Microcal P20Документ2 страницыMicrocal P20ctmtectrolОценок пока нет
- ReflectionДокумент3 страницыReflectionapi-174391216Оценок пока нет
- Paper 11-ICOSubmittedДокумент10 страницPaper 11-ICOSubmittedNhat Tan MaiОценок пока нет
- Ethernet: Outline Multiple Access and Ethernet Intro Ethernet Framing CSMA/CD Protocol Exponential BackoffДокумент25 страницEthernet: Outline Multiple Access and Ethernet Intro Ethernet Framing CSMA/CD Protocol Exponential BackoffcheckОценок пока нет
- Substitution Reactions - PMДокумент64 страницыSubstitution Reactions - PMprasoon jhaОценок пока нет
- Vialyn Group ResearchДокумент17 страницVialyn Group ResearchVial LynОценок пока нет
- Vehicles 6-Speed PowerShift Transmission DPS6 DescriptionДокумент3 страницыVehicles 6-Speed PowerShift Transmission DPS6 DescriptionCarlos SerapioОценок пока нет
- Preparation, Characterization, and Evaluation of Some Ashless Detergent-Dispersant Additives For Lubricating Engine OilДокумент10 страницPreparation, Characterization, and Evaluation of Some Ashless Detergent-Dispersant Additives For Lubricating Engine OilNelson Enrique Bessone MadridОценок пока нет
- Dadm Assesment #2: Akshat BansalДокумент24 страницыDadm Assesment #2: Akshat BansalAkshatОценок пока нет
- MGN815: Business Models: Ajay ChandelДокумент38 страницMGN815: Business Models: Ajay ChandelSam RehmanОценок пока нет
- Major Chnage at Tata TeaДокумент36 страницMajor Chnage at Tata Teasheetaltandon100% (1)
- Zanussi Parts & Accessories - Search Results3 - 91189203300Документ4 страницыZanussi Parts & Accessories - Search Results3 - 91189203300Melissa WilliamsОценок пока нет
- Th-Sunday Magazine 6 - 2Документ8 страницTh-Sunday Magazine 6 - 2NianotinoОценок пока нет
- Majan Audit Report Final2Документ46 страницMajan Audit Report Final2Sreekanth RallapalliОценок пока нет
- Maintaining Godly Spirituality in The Face of ChallengesДокумент3 страницыMaintaining Godly Spirituality in The Face of ChallengesDavid OmoniyiОценок пока нет
- Capacitor Trip Device CTD-4Документ2 страницыCapacitor Trip Device CTD-4DAS1300Оценок пока нет
- The Impact of Online Games To The AcademicДокумент20 страницThe Impact of Online Games To The AcademicJessica BacaniОценок пока нет
- Inglês - Advérbios - Adverbs.Документ18 страницInglês - Advérbios - Adverbs.KhyashiОценок пока нет
- His 101 Final ReportДокумент15 страницHis 101 Final ReportShohanur RahmanОценок пока нет
- Maharashtra State Board of Technical Education. Academic Monitoring Department ProfileДокумент14 страницMaharashtra State Board of Technical Education. Academic Monitoring Department Profilevspd2010Оценок пока нет