Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- FDR - Jasper Racing Trailing ArmДокумент50 страницFDR - Jasper Racing Trailing ArmAkshay TilekarОценок пока нет
- MET2013 Hinojosa RicardoДокумент27 страницMET2013 Hinojosa RicardoAmal GeorgeОценок пока нет
- Senior Design ProjectДокумент26 страницSenior Design ProjectAmal GeorgeОценок пока нет
- Smashing Book #4 - New Perspectives On Web DesignДокумент496 страницSmashing Book #4 - New Perspectives On Web Designsoul_fryОценок пока нет
- Experiment No. 10 Calculate The Interpolating/Extrapolating Values of A Function Using Newton'S Backward MethodДокумент3 страницыExperiment No. 10 Calculate The Interpolating/Extrapolating Values of A Function Using Newton'S Backward MethodAmal GeorgeОценок пока нет
- Experiment No. 5 Calculate Area Under The Curve Using Simpson'S 1/3 RuleДокумент6 страницExperiment No. 5 Calculate Area Under The Curve Using Simpson'S 1/3 RuleAmal GeorgeОценок пока нет
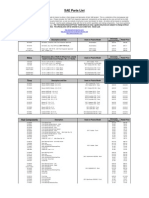
- Outer Diameter (Metres) Inner Diameter (Metres) Wall Thickness (Metres)Документ2 страницыOuter Diameter (Metres) Inner Diameter (Metres) Wall Thickness (Metres)Amal GeorgeОценок пока нет
- Operation ManualДокумент11 страницOperation ManualAlpesh ValaОценок пока нет
- Dear Customer,: Print This PageДокумент1 страницаDear Customer,: Print This PageAmal GeorgeОценок пока нет
- Center of GravityДокумент6 страницCenter of GravityAmal GeorgeОценок пока нет
- CarSim Licence Center DetailsДокумент3 страницыCarSim Licence Center DetailsAmal GeorgeОценок пока нет
- PolarisДокумент5 страницPolarisAmal GeorgeОценок пока нет
- Rajiv Gandhi University of Health Sciences Exam Result: PrintДокумент1 страницаRajiv Gandhi University of Health Sciences Exam Result: PrintAbhi NavОценок пока нет
- 2011 33 MaintenanceДокумент16 страниц2011 33 MaintenanceKrishna Khandige100% (1)
- Intro To BiochemДокумент2 страницыIntro To BiochemPeachy PieОценок пока нет
- 8 Field Quality PlanДокумент18 страниц8 Field Quality PlanRamaKrishna AОценок пока нет
- Conversion Tables by Cafe Fernando Food BlogДокумент5 страницConversion Tables by Cafe Fernando Food BlogElston FooОценок пока нет
- Watercolor SecretsДокумент60 страницWatercolor Secretsmissdoisneau98% (47)
- Soal Pat Bahasa Inggris Kelas 5Документ5 страницSoal Pat Bahasa Inggris Kelas 5Tini Bastuti Joyolaksono100% (1)
- F3 FDCS 1Документ3 страницыF3 FDCS 1Lucian LuciОценок пока нет
- Research Report 2011 Asses Water ChambalДокумент41 страницаResearch Report 2011 Asses Water Chambalsamyak sambhareОценок пока нет
- Appetizer Summative TestДокумент36 страницAppetizer Summative TestArgelynPadolinaPedernalОценок пока нет
- Welding Inspection Technology: Module 7 - Visual Inspection WorkshopДокумент20 страницWelding Inspection Technology: Module 7 - Visual Inspection Workshoprex valenciaОценок пока нет
- Tabla QuimicaДокумент12 страницTabla QuimicaPablo PasqualiniОценок пока нет
- Hydrostatic, Deviatoric StressesДокумент7 страницHydrostatic, Deviatoric StressespanbuОценок пока нет
- Volume 2 Part 1 - Civil & Arch SpecificationsДокумент173 страницыVolume 2 Part 1 - Civil & Arch Specificationsanish100% (1)
- Boil-Off Gas CalculationsДокумент14 страницBoil-Off Gas CalculationsAlberto100% (1)
- Research Proposal PHDДокумент19 страницResearch Proposal PHDSuleiman Mukhtar100% (2)
- China Care Foundation - Fall 2010 NewsletterДокумент8 страницChina Care Foundation - Fall 2010 NewsletterChinaCareОценок пока нет
- Chapter - 2 - Unit Hydrograph2Документ33 страницыChapter - 2 - Unit Hydrograph2Abhilekh PaudelОценок пока нет
- Indian Standard: Methods of Chemical Testing of LeatherДокумент75 страницIndian Standard: Methods of Chemical Testing of LeatherAshish DixitОценок пока нет
- Research Argumentative EssayДокумент6 страницResearch Argumentative EssayHoney LabajoОценок пока нет
- Ar ExportsДокумент1 страницаAr ExportsRais AlamОценок пока нет
- Cigarettes and AlcoholДокумент1 страницаCigarettes and AlcoholHye Jin KimОценок пока нет
- QuestionsДокумент6 страницQuestionsRomeo martinezОценок пока нет
- TSBДокумент3 страницыTSBnoe dela vegaОценок пока нет
- 1 s2.0 S0956713515002546 Main PDFДокумент9 страниц1 s2.0 S0956713515002546 Main PDFIfwat ThaqifОценок пока нет
- The DSG DQ200 LifespanДокумент1 страницаThe DSG DQ200 Lifespanqt99qzyhrbОценок пока нет
- B.W.G. - Birmingham Wire Gauge: The Wall Thickness of Pipes - Gauge and Decimal Parts of An InchДокумент3 страницыB.W.G. - Birmingham Wire Gauge: The Wall Thickness of Pipes - Gauge and Decimal Parts of An InchLuis Fernando Perez LaraОценок пока нет
- FLAC DynamicДокумент294 страницыFLAC DynamicMaximillian KrisnadiОценок пока нет
- HART - Wikipedia, The Free EncyclopediaДокумент3 страницыHART - Wikipedia, The Free EncyclopediakalyanupdownОценок пока нет
- Identifying - Explaining Brake System FunctionsДокумент39 страницIdentifying - Explaining Brake System FunctionsJestoni100% (1)