Вам также может понравиться
- State Space Representation Part-1Документ47 страницState Space Representation Part-1SingappuliОценок пока нет
- Transfer Function: FOR Discrete Lti SystemДокумент38 страницTransfer Function: FOR Discrete Lti SystemKrishn LimbachiyaОценок пока нет
- EE 4443/4329 - Control Systems Design Project: Updated:Tuesday, June 15, 2004Документ6 страницEE 4443/4329 - Control Systems Design Project: Updated:Tuesday, June 15, 2004bcooper477Оценок пока нет
- ELG4152L305Документ33 страницыELG4152L305Rahul GalaОценок пока нет
- ENGM541 Lab5 Runge Kutta SimulinkstatespaceДокумент5 страницENGM541 Lab5 Runge Kutta SimulinkstatespaceAbiodun GbengaОценок пока нет
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkДокумент10 страницMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraОценок пока нет
- State SpaceДокумент20 страницState SpacepattanayaksuchiОценок пока нет
- Lect Note 1 IntroДокумент28 страницLect Note 1 IntroJie RongОценок пока нет
- Classnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityДокумент51 страницаClassnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityGürkan YamanОценок пока нет
- Method of Bifurcation Analysis of Hybrid Nonlinear Systems: Quentin BRANDON and Tetsushi UETA Dani'Ele Fournier-PrunaretДокумент4 страницыMethod of Bifurcation Analysis of Hybrid Nonlinear Systems: Quentin BRANDON and Tetsushi UETA Dani'Ele Fournier-PrunaretmenguemengueОценок пока нет
- Handout 1Документ16 страницHandout 1Chadwick BarclayОценок пока нет
- Professor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaДокумент120 страницProfessor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaAhmet KılıçОценок пока нет
- State SpaceДокумент101 страницаState SpaceShivam AroraОценок пока нет
- EE 312 Lecture 3Документ15 страницEE 312 Lecture 3دكتور كونوهاОценок пока нет
- Automatic Control ExerciseДокумент140 страницAutomatic Control Exercisetaile1995Оценок пока нет
- Lecture 2Документ47 страницLecture 2Houssam moussaОценок пока нет
- AppendixC 2012Документ6 страницAppendixC 2012Daniel LiawОценок пока нет
- 45 - 70685 - EE411 - 2013 - 1 - 1 - 1 - Control System I-State SpaceДокумент84 страницы45 - 70685 - EE411 - 2013 - 1 - 1 - 1 - Control System I-State SpaceSwifty SpotОценок пока нет
- Full State Feedback ControlДокумент29 страницFull State Feedback ControlBi Chen100% (1)
- Module 7: Discrete State Space Models: Lecture Note 1Документ4 страницыModule 7: Discrete State Space Models: Lecture Note 1venkat mandaОценок пока нет
- Control Systems EngineeringДокумент32 страницыControl Systems EngineeringSingappuli100% (2)
- Slides Control System 2Документ13 страницSlides Control System 2Eric GardnerОценок пока нет
- Inno2024 Emt4203 Control II Notes r5Документ63 страницыInno2024 Emt4203 Control II Notes r5kabuej3Оценок пока нет
- Week 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Документ5 страницWeek 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Michael LiОценок пока нет
- Control System II - Lecture NotesДокумент78 страницControl System II - Lecture Notes34plt34Оценок пока нет
- HET312 NotesДокумент41 страницаHET312 NotesTing SamuelОценок пока нет
- Lab3 v2Документ10 страницLab3 v2Pranshumaan SinghОценок пока нет
- Protection of Information in Quantum Databases: Y. OzhigovДокумент10 страницProtection of Information in Quantum Databases: Y. OzhigovAmaal GhaziОценок пока нет
- Elce 4003 - 3 - 2 PDFДокумент10 страницElce 4003 - 3 - 2 PDFomerОценок пока нет
- Ejercicios DSCДокумент39 страницEjercicios DSCFreyley LeyvaОценок пока нет
- Problem2 PDFДокумент3 страницыProblem2 PDFEdgar HuancaОценок пока нет
- Control System IДокумент95 страницControl System I34plt34Оценок пока нет
- Enee 660 HW #7Документ2 страницыEnee 660 HW #7PeacefulLion0% (1)
- Rasheef Maths AssignmantДокумент10 страницRasheef Maths AssignmantMohamed SanoosОценок пока нет
- Applications of Dynamical SystemsДокумент32 страницыApplications of Dynamical SystemsAl VlearОценок пока нет
- 6243 Spring 2008Документ153 страницы6243 Spring 2008combatps1Оценок пока нет
- FEEDLAB 02 - System ModelsДокумент8 страницFEEDLAB 02 - System ModelsAnonymous DHJ8C3oОценок пока нет
- EGR214B1 19 16LSp1Документ19 страницEGR214B1 19 16LSp1sultanОценок пока нет
- Nonlinear Observers: University of California, Davis, CA, USAДокумент21 страницаNonlinear Observers: University of California, Davis, CA, USASarah CarmanОценок пока нет
- Matlab Training Session Iv Simulating Dynamic Systems: Sampling The Solution EquationДокумент9 страницMatlab Training Session Iv Simulating Dynamic Systems: Sampling The Solution EquationAli AhmadОценок пока нет
- Output-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceДокумент10 страницOutput-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceEva KaslikОценок пока нет
- Chapter 03Документ89 страницChapter 03Şirin AdaОценок пока нет
- Automatic Control III Homework Assignment 3 2015Документ4 страницыAutomatic Control III Homework Assignment 3 2015salimОценок пока нет
- 26 Control Engineering LAbДокумент50 страниц26 Control Engineering LAbEashan PendseОценок пока нет
- Using Dynamic Neural Networks To Generate Chaos: An Inverse Optimal Control ApproachДокумент7 страницUsing Dynamic Neural Networks To Generate Chaos: An Inverse Optimal Control ApproachmxjoeОценок пока нет
- Basic Control System With Matlab ExamplesДокумент19 страницBasic Control System With Matlab ExamplesMostafa8425Оценок пока нет
- Advanced Control SystemsДокумент81 страницаAdvanced Control Systemsanoop sathyanОценок пока нет
- C-T Systems Laplace Transform Solving Differential EquationsДокумент21 страницаC-T Systems Laplace Transform Solving Differential Equationshamza abdo mohamoudОценок пока нет
- I. Introduction To Nonlinear Dynamics Question To The Class: Why Do We Model Things As Engineers?Документ5 страницI. Introduction To Nonlinear Dynamics Question To The Class: Why Do We Model Things As Engineers?Abdesselem BoulkrouneОценок пока нет
- Inno2018 CE I MET4 ModellingДокумент12 страницInno2018 CE I MET4 ModellinginnoodiraОценок пока нет
- Chapter 1 IntroductionДокумент32 страницыChapter 1 IntroductionYucheng XiangОценок пока нет
- A Mathematical Approach of Fractional-Order Systems: Costandin Marius-SimionДокумент4 страницыA Mathematical Approach of Fractional-Order Systems: Costandin Marius-SimionMOKANSОценок пока нет
- 01 IntroДокумент28 страниц01 Introsouvik5000Оценок пока нет
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОт EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОценок пока нет
- Difference Equations in Normed Spaces: Stability and OscillationsОт EverandDifference Equations in Normed Spaces: Stability and OscillationsОценок пока нет
- Induction Motor 1Документ34 страницыInduction Motor 1hitesh89Оценок пока нет
- AC Machine FundamentalsДокумент15 страницAC Machine Fundamentalshitesh89Оценок пока нет
- ELE-351 Electrical Energy Conversion Electrical Energy ConversionДокумент16 страницELE-351 Electrical Energy Conversion Electrical Energy Conversionhitesh89Оценок пока нет
- Lab 05 (Servo)Документ4 страницыLab 05 (Servo)hitesh89Оценок пока нет
- Windowing PDFДокумент7 страницWindowing PDFhitesh89Оценок пока нет
- American University of Sharjah College of Engineering Department of Electrical EngineeringДокумент1 страницаAmerican University of Sharjah College of Engineering Department of Electrical Engineeringhitesh89Оценок пока нет
- "View" "Slide Show.": Resources Chapter MenuДокумент92 страницы"View" "Slide Show.": Resources Chapter Menuelty TanОценок пока нет
- Conradi Probe ExercisesДокумент13 страницConradi Probe ExercisesEray ArıkОценок пока нет
- MOSFET Selector Guide Definitions: Status DescriptionДокумент84 страницыMOSFET Selector Guide Definitions: Status DescriptionBanyugeaОценок пока нет
- HW1 Diode Bridge Rectifiers-Rev0Документ28 страницHW1 Diode Bridge Rectifiers-Rev0nikolakaОценок пока нет
- P-N Junction Diode & Diode CharacteristicsДокумент13 страницP-N Junction Diode & Diode Characteristicsapi-19822723Оценок пока нет
- Performance of Radiant Cooling Surfaces With Respect To Energy Consumption and Thermal ComfortДокумент11 страницPerformance of Radiant Cooling Surfaces With Respect To Energy Consumption and Thermal ComfortTheen BadhushОценок пока нет
- 2010 HSC Term4 Theory PhysicsДокумент9 страниц2010 HSC Term4 Theory PhysicsSandy WongОценок пока нет
- PKA-RP2.5FAL Pka-Rp3Fal Pka-Rp4Fal: Technical & Service ManualДокумент56 страницPKA-RP2.5FAL Pka-Rp3Fal Pka-Rp4Fal: Technical & Service ManualMihaela CaciumarciucОценок пока нет
- Applied Thermodynamics: BSEE 2019-2023 3 Semester Pakistan Institute of Engineering and Applied Sciences, IslamabadДокумент26 страницApplied Thermodynamics: BSEE 2019-2023 3 Semester Pakistan Institute of Engineering and Applied Sciences, IslamabadAliОценок пока нет
- Em - 16 MarksДокумент14 страницEm - 16 MarkskesavantОценок пока нет
- SVP 917 ManualДокумент8 страницSVP 917 ManualGalvao.endОценок пока нет
- AE 2012 Fuid Mechanics SyllabusДокумент4 страницыAE 2012 Fuid Mechanics SyllabusamaniОценок пока нет
- Problem Set 9 SolutionsДокумент10 страницProblem Set 9 SolutionssagarnitishpirtheeОценок пока нет
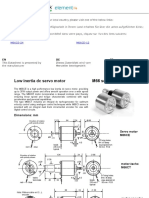
- Maxon ConfigДокумент12 страницMaxon ConfigFurkan YAŞARОценок пока нет
- Problems On Resultant of Two Forces Acting at A Point (Parallelogram Law of Forces) Tutorial ProblemsДокумент2 страницыProblems On Resultant of Two Forces Acting at A Point (Parallelogram Law of Forces) Tutorial ProblemsSudhakar UppalapatiОценок пока нет
- Revision Paper Physics-12, Unit-XiДокумент2 страницыRevision Paper Physics-12, Unit-XiroshanvalexОценок пока нет
- M66ce-24 M66ce-12Документ6 страницM66ce-24 M66ce-12TECH NEWSОценок пока нет
- STK0380P: PreliminaryДокумент4 страницыSTK0380P: PreliminaryHaider AliОценок пока нет
- Combined Gas LawДокумент4 страницыCombined Gas LawAgyao Yam FaithОценок пока нет
- Frequency Response: Reading: Sedra & Smith: Chapter 1.6, Chapter 3.6 and Chapter 9 (MOS Portions)Документ40 страницFrequency Response: Reading: Sedra & Smith: Chapter 1.6, Chapter 3.6 and Chapter 9 (MOS Portions)pravin patilОценок пока нет
- Systemair MUB - F 042 400D4Документ2 страницыSystemair MUB - F 042 400D4diziodavide21Оценок пока нет
- SEN-30201: MAX31865 RTD-to-Digital Breakout Board, Multiple Cal OptionsДокумент8 страницSEN-30201: MAX31865 RTD-to-Digital Breakout Board, Multiple Cal OptionsAchref NajjarОценок пока нет
- Fundamentals of Electric Circuits Basic ConceptsДокумент15 страницFundamentals of Electric Circuits Basic ConceptsThiruppathy KesavanОценок пока нет
- Module 3 TorsionДокумент13 страницModule 3 TorsionJay LopezОценок пока нет
- Design of Reliable High Voltage Avalanche Transistor PulsersДокумент3 страницыDesign of Reliable High Voltage Avalanche Transistor Pulsersapchar1Оценок пока нет
- Signal Integrity and Power Integrity AnalysisДокумент51 страницаSignal Integrity and Power Integrity AnalysisvietsangtaoОценок пока нет
- Origin Have A Negative Y-Value, and Points Below A Positive Y-Value. We Have That, ForДокумент4 страницыOrigin Have A Negative Y-Value, and Points Below A Positive Y-Value. We Have That, ForVictor CoronelОценок пока нет
- Cubic Conversion TLE PracticeДокумент2 страницыCubic Conversion TLE PracticeInktactics YahОценок пока нет