Вам также может понравиться
- 555 and 556 Timer CircuitsДокумент16 страниц555 and 556 Timer Circuitssiddharthmohta100% (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- DC Motor Speed Controller Using IC 555 TimerДокумент8 страницDC Motor Speed Controller Using IC 555 Timerfarazpayoneer21Оценок пока нет
- Power Electronics ProjectsДокумент5 страницPower Electronics ProjectsEngr FN AОценок пока нет
- List of 7400 Series Integrated Circuits PDFДокумент22 страницыList of 7400 Series Integrated Circuits PDFduriiОценок пока нет
- Stepper Motor ControllerДокумент3 страницыStepper Motor Controllerelfrich100% (3)
- Stepper Motor: Program Studi Mekatronika Politeknik Mekatronika Sanata Dharma 2014Документ33 страницыStepper Motor: Program Studi Mekatronika Politeknik Mekatronika Sanata Dharma 2014Klemens Reynaldo100% (1)
- Oscillator: How To Build An InverterДокумент7 страницOscillator: How To Build An InverterGopal Prasad BansalОценок пока нет
- The 1974 RCA Triac SCR and Diacs Data BookДокумент538 страницThe 1974 RCA Triac SCR and Diacs Data BookEdd Whatley100% (1)
- Mechanical Properties ExplainedДокумент38 страницMechanical Properties ExplainedJamaica VelascoОценок пока нет
- 0-50V 3A Variable Power SupplyДокумент17 страниц0-50V 3A Variable Power SupplyferdinandОценок пока нет
- Bipolar Stepper Motor Driver 74194Документ12 страницBipolar Stepper Motor Driver 74194mekuannintmesfin100% (2)
- Aviation band receiver guideДокумент8 страницAviation band receiver guidedp500100% (1)
- LCD 16X2 para PicsДокумент21 страницаLCD 16X2 para Picsjuarez100% (1)
- Fourth Monthly Exam T.L.E 7 S.Y. 2019 - 2020Документ2 страницыFourth Monthly Exam T.L.E 7 S.Y. 2019 - 2020riela dhee lagramaОценок пока нет
- Open Die ForgingДокумент7 страницOpen Die ForgingCharanjeet Singh0% (1)
- RENAULT Quality PlanningДокумент20 страницRENAULT Quality PlanningEhsan ArbabtaftiОценок пока нет
- hd44780 1602A LCDДокумент74 страницыhd44780 1602A LCDJoão Paulo Versiani LadeiaОценок пока нет
- Arduino Basics for Amateur RadioДокумент36 страницArduino Basics for Amateur Radiomercury7k29750Оценок пока нет
- A Grammar of The Sgaw KarenДокумент59 страницA Grammar of The Sgaw KarenPoisonous FlowerОценок пока нет
- Ebook - Proteus LibraryДокумент67 страницEbook - Proteus LibraryAkhmad GuiОценок пока нет
- Measurements & Electronic Instruments Laboratory Experiment ManualДокумент3 страницыMeasurements & Electronic Instruments Laboratory Experiment Manualfirst lastОценок пока нет
- Noritake Display 7k A-Apn200 E21Документ52 страницыNoritake Display 7k A-Apn200 E21Muhammad ArslanОценок пока нет
- Adafruit Optical Fingerprint Sensor: Created by Lady AdaДокумент26 страницAdafruit Optical Fingerprint Sensor: Created by Lady AdaPaulina Cortes100% (1)
- 60MHz LCD Frequency CounterДокумент3 страницы60MHz LCD Frequency CounterHector Ledesma IIIОценок пока нет
- Power Suply ATXДокумент6 страницPower Suply ATXamanda100% (1)
- 16x2 LCD Display Module GuideДокумент5 страниц16x2 LCD Display Module GuidesalmanОценок пока нет
- Concrete Compressive StrengthДокумент4 страницыConcrete Compressive StrengthklynchelleОценок пока нет
- Adafruit GFX Graphics LibraryДокумент18 страницAdafruit GFX Graphics Librarylyonsm_6Оценок пока нет
- Manual TB6560Документ16 страницManual TB6560erickmoraesОценок пока нет
- JVL QuickStep Integrated Stepper Motor MIS34 Up To 9 NMДокумент8 страницJVL QuickStep Integrated Stepper Motor MIS34 Up To 9 NMElectromate100% (2)
- Arduino-Info - ArduinoPower PDFДокумент33 страницыArduino-Info - ArduinoPower PDFNc BeanОценок пока нет
- LS7290 Stepper Motor ControlДокумент12 страницLS7290 Stepper Motor ControlOlger NavarroОценок пока нет
- 1992 Harris Product Selection GuideДокумент312 страниц1992 Harris Product Selection GuidePradeep PolavarpuОценок пока нет
- Opa An AssДокумент8 страницOpa An Assgvkreddyg100% (1)
- The MosfetДокумент10 страницThe MosfetRene100% (2)
- Schematic NanoVNA-H4 2Документ1 страницаSchematic NanoVNA-H4 2Dadang100% (2)
- Servo Motor Speed and Direction ControlДокумент7 страницServo Motor Speed and Direction Controltazeb100% (1)
- Display LCDДокумент4 страницыDisplay LCDwilliams missael100% (2)
- JVL Quickstep BrochureДокумент8 страницJVL Quickstep BrochureElectromate100% (1)
- Touch Lamp Circuit DiagramДокумент4 страницыTouch Lamp Circuit DiagramedwardОценок пока нет
- Stepper Motor DriverДокумент3 страницыStepper Motor Driverfrank_grimesОценок пока нет
- Adafruit Si5351 Clock Generator BreakoutДокумент25 страницAdafruit Si5351 Clock Generator BreakoutDirson Volmir WilligОценок пока нет
- Pololu - A4988 Stepper Motor Driver CarrierДокумент7 страницPololu - A4988 Stepper Motor Driver CarrierJuan Alberto Casares ZaragozaОценок пока нет
- AN-478A TextДокумент12 страницAN-478A TextAl BenОценок пока нет
- JLH Class-A Update: (Back To Index)Документ10 страницJLH Class-A Update: (Back To Index)Daniel ScardiniОценок пока нет
- HD44780 LCD Datasheet ExplainedДокумент1 страницаHD44780 LCD Datasheet ExplainedAnkit Daftery100% (4)
- ACTIVE MINI SUBWOOFER PART 1Документ5 страницACTIVE MINI SUBWOOFER PART 1Abdul GeaОценок пока нет
- Datasheet - M542H Stepper Motor DriverДокумент10 страницDatasheet - M542H Stepper Motor DriversthollanderОценок пока нет
- Improve Your Octopus Curve Tracer with a Single Voltage TransformerДокумент5 страницImprove Your Octopus Curve Tracer with a Single Voltage TransformerWilliams BurgosОценок пока нет
- HY-DIV268N-5A two-phase hybrid stepper motor drive manualДокумент8 страницHY-DIV268N-5A two-phase hybrid stepper motor drive manualArmin SelimovicОценок пока нет
- Digital DiceДокумент3 страницыDigital DicechakralabsОценок пока нет
- Lafayette Ha 73b CB Walkie Talkie User Manual SchematicДокумент7 страницLafayette Ha 73b CB Walkie Talkie User Manual SchematicRobert ParsonsОценок пока нет
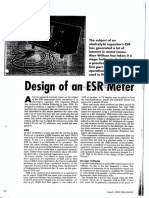
- ESR Capacitor Meter Project PDFДокумент22 страницыESR Capacitor Meter Project PDFzoran_stev100% (1)
- User Guide - Air Quality Sensor Kit PDFДокумент45 страницUser Guide - Air Quality Sensor Kit PDFMR. TОценок пока нет
- Print Page - Ov7670 With Both Arduino Uno and Now MegaДокумент60 страницPrint Page - Ov7670 With Both Arduino Uno and Now MegaAhmad Arif Sakti100% (1)
- Gyro Camera For Motorcycle Using ArduinoДокумент8 страницGyro Camera For Motorcycle Using ArduinoCUIDAITOОценок пока нет
- Electronics Lab IIДокумент3 страницыElectronics Lab IIVikram RaoОценок пока нет
- Datasheet Sensor FotoelectricoДокумент3 страницыDatasheet Sensor FotoelectricoFederico CalcopietroОценок пока нет
- JLH 2001 DesignДокумент4 страницыJLH 2001 DesignDaniel ScardiniОценок пока нет
- Stepper Motor Driver (74194)Документ10 страницStepper Motor Driver (74194)kizt_mpoeОценок пока нет
- Bipolar Stepper Motor..Документ17 страницBipolar Stepper Motor..Jaka Rusmana100% (1)
- (212142518) Stepper Motor Control Using MicrocontrollerДокумент4 страницы(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiОценок пока нет
- EDM V2.0 Stepper Motor Conversion GuideДокумент4 страницыEDM V2.0 Stepper Motor Conversion GuideNacer MezghicheОценок пока нет
- Automatic Speed Control of 1-Ph Induction MotorДокумент41 страницаAutomatic Speed Control of 1-Ph Induction MotorPrakash Dudharkar100% (1)
- STEPPER MOTOR CONTROL USING INFERA REDMinor ProjectДокумент22 страницыSTEPPER MOTOR CONTROL USING INFERA REDMinor ProjectJet's100% (2)
- Steel Castings, Welding, Qualifications of Procedures and PersonnelДокумент15 страницSteel Castings, Welding, Qualifications of Procedures and PersonnelRafael CossolinoОценок пока нет
- Full Text 01Документ110 страницFull Text 01GumbuzaОценок пока нет
- 0580 w13 QP 41Документ20 страниц0580 w13 QP 41Haider AliОценок пока нет
- Coreldraw 12 Hotkeys - Keyboard ShortcutsДокумент6 страницCoreldraw 12 Hotkeys - Keyboard ShortcutsRais AhmadОценок пока нет
- 1910 179bookletДокумент12 страниц1910 179bookletRichard DeNijsОценок пока нет
- Test Automation Design PrinciplesДокумент15 страницTest Automation Design PrinciplesSujay KumarОценок пока нет
- 2 (Molecular Diffusion in Gases)Документ66 страниц2 (Molecular Diffusion in Gases)Nasir ShamsОценок пока нет
- Dome Enclosure: MoellerДокумент3 страницыDome Enclosure: MoellerLjubomir VasicОценок пока нет
- High-Resolution Micromachined Interferometric AccelerometerДокумент75 страницHigh-Resolution Micromachined Interferometric AccelerometerjitendraОценок пока нет
- Pending Exception RДокумент17 страницPending Exception Rsyafri maryonoОценок пока нет
- Recent Updates For The Heat Transfer Solver in Ls Dyna R With Focus On Computational Welding MechanicsДокумент14 страницRecent Updates For The Heat Transfer Solver in Ls Dyna R With Focus On Computational Welding MechanicsamitkmrjОценок пока нет
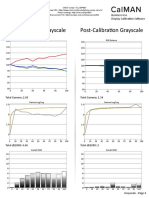
- TCL 55P607 CNET Review Calibration ResultsДокумент3 страницыTCL 55P607 CNET Review Calibration ResultsDavid KatzmaierОценок пока нет
- Shop Exercise 5Документ16 страницShop Exercise 5Athena GrotesqueОценок пока нет
- Xy6112 EtcДокумент4 страницыXy6112 EtcJalal AsadianОценок пока нет
- CM-4G-GPS Quick Guide: Short Guide How To Start Using CM-GPRS ModuleДокумент4 страницыCM-4G-GPS Quick Guide: Short Guide How To Start Using CM-GPRS Modulezakki ahmadОценок пока нет
- G4pc50ud-Fd IgbtДокумент10 страницG4pc50ud-Fd IgbtMiguel DuranОценок пока нет
- Clients Class Workbook v5.1 CBTДокумент192 страницыClients Class Workbook v5.1 CBTmich0pОценок пока нет
- Understanding the Strength and Limitations of DES EncryptionДокумент32 страницыUnderstanding the Strength and Limitations of DES EncryptionArya KumariОценок пока нет
- Columns and preconditions reportДокумент2 страницыColumns and preconditions reportIndradeep ChatterjeeОценок пока нет
- Materials and Techniques Used For The "Vienna Moamin": Multianalytical Investigation of A Book About Hunting With Falcons From The Thirteenth CenturyДокумент17 страницMaterials and Techniques Used For The "Vienna Moamin": Multianalytical Investigation of A Book About Hunting With Falcons From The Thirteenth CenturyAirish FОценок пока нет
- Lecture 10 - Dry Etching PDFДокумент7 страницLecture 10 - Dry Etching PDFSiddhant ModiОценок пока нет
- Eq Generacion Electrica Iluminacion Olympian GEP445Документ6 страницEq Generacion Electrica Iluminacion Olympian GEP445jedu202Оценок пока нет
- Narayana Iit Academy India: Paper - IДокумент39 страницNarayana Iit Academy India: Paper - Iaatt aattОценок пока нет
- MQTT RGB Light For HomeДокумент3 страницыMQTT RGB Light For HomearevazhagunvcОценок пока нет