Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Grade 10.00 Out of 10.00 (100%) : Question TextДокумент69 страницGrade 10.00 Out of 10.00 (100%) : Question Textmarlon corpuzОценок пока нет
- I Preferences and Choice 1Документ17 страницI Preferences and Choice 1shere0002923Оценок пока нет
- Probability Random Variables and Stochastic Processes by Papoulis PillaiДокумент437 страницProbability Random Variables and Stochastic Processes by Papoulis Pillaishere0002923100% (2)
- Lecture Notes On Probability TheoryДокумент6 страницLecture Notes On Probability Theoryshere0002923Оценок пока нет
- Why Encouraging More People To Become EntrepreneursДокумент9 страницWhy Encouraging More People To Become Entrepreneursshere0002923Оценок пока нет
- MCQ Week07ansДокумент6 страницMCQ Week07ansSiu SiuОценок пока нет
- TQ - StatДокумент9 страницTQ - StatJohn Mark Fernandez DanlagОценок пока нет
- 1 Developing A Risk ProfileДокумент15 страниц1 Developing A Risk ProfileNitu Roy100% (1)
- ASTM D7778-15 Planificación InterlaboratorioДокумент11 страницASTM D7778-15 Planificación InterlaboratorioDoina Marquez100% (1)
- Optimal Strategy For Inspection and Repair of Structural Systems PDFДокумент8 страницOptimal Strategy For Inspection and Repair of Structural Systems PDFSai RamОценок пока нет
- Mean Value TheoremДокумент4 страницыMean Value Theorembella_duaneОценок пока нет
- What Is Column ChromatographyДокумент5 страницWhat Is Column ChromatographyAngelОценок пока нет
- Jasco HPLC ManualДокумент40 страницJasco HPLC ManualanangОценок пока нет
- 19 12 20 InequalitiesДокумент21 страница19 12 20 InequalitiesKauan KakáОценок пока нет
- Linear Relations and FunctionsДокумент2 страницыLinear Relations and FunctionsayeshaОценок пока нет
- Higher Mathematics MathematicsДокумент4 страницыHigher Mathematics MathematicsRuslan AganiОценок пока нет
- NCERT Solutions Class 12 Maths Chapter 9 Differential EquationsДокумент50 страницNCERT Solutions Class 12 Maths Chapter 9 Differential EquationsVidyakulОценок пока нет
- Sample Qualitative Methods Section of Research PaperДокумент5 страницSample Qualitative Methods Section of Research PaperwfoyquvkgОценок пока нет
- Data Structure Part 1 50 MCQ CexamindiaДокумент21 страницаData Structure Part 1 50 MCQ Cexamindiashristy kumariОценок пока нет
- Answer All The Following QuestionsДокумент3 страницыAnswer All The Following QuestionsMohamed RaheemОценок пока нет
- Lect 6 Stability2Документ42 страницыLect 6 Stability2Bruce ChanОценок пока нет
- Lecture03 Fourier Representations of SignalsДокумент50 страницLecture03 Fourier Representations of Signalschw2054100% (2)
- Quantitative Data Analysis PresentationДокумент23 страницыQuantitative Data Analysis PresentationFaisal QureshiОценок пока нет
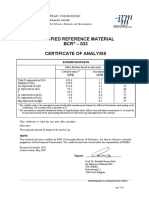
- Certified Reference Material BCR - 033 Certificate of AnalysisДокумент3 страницыCertified Reference Material BCR - 033 Certificate of Analysisandri gerhanaОценок пока нет
- BesselДокумент69 страницBesselrОценок пока нет
- The Role of Integrability in A Large Class of Physical SystemsДокумент56 страницThe Role of Integrability in A Large Class of Physical Systemsconmec.crplОценок пока нет
- Data Mining For Business in Python DeckДокумент93 страницыData Mining For Business in Python DeckCloudzoneОценок пока нет
- FX Ax BX C: The Quadratic Function - Chapter 8Документ8 страницFX Ax BX C: The Quadratic Function - Chapter 8api-298592212Оценок пока нет
- FFTandMatLab Wanjun HuangДокумент26 страницFFTandMatLab Wanjun HuangDiego PurizagaОценок пока нет
- Integration SummaryДокумент5 страницIntegration SummarySweekrut SahooОценок пока нет
- Theoretical Framework & HypothesisДокумент28 страницTheoretical Framework & HypothesisDjoko PriyonoОценок пока нет
- Divided Difference ExamplesДокумент10 страницDivided Difference ExamplesKokKeiОценок пока нет
- MCQS of Operations ReearchДокумент7 страницMCQS of Operations Reearchrachit100% (2)
- Introduction To Complex Analysis (Lecture Notes, 2003) ChenДокумент194 страницыIntroduction To Complex Analysis (Lecture Notes, 2003) Chenapi-3840623Оценок пока нет