Chapter 5: Two degrees of freedom systems
When the mass is attached to the lower end of the spring it deflects by from the position in Fig
5.x2a to that in Fig 5.2xb above.
Equations of motion, from equilibrium of the two masses:
m
1
x
1
= -k
1
x
1
+ k
2
(x
2
- x
1
) (i)
m
2
x
2
= -k
2
(x
2
- x
1
) - k
3
x
2
(ii)
m
1
x
1
+ k
1
x
1
- k
2
(x
2
- x
1
) = u (iii)
m
2
x
2
+ k
2
(x
2
- x
1
) + k
3
x
2
= u (iv)
Rearranging gives:
m
1
x
1
+ (k
1
+ k
2
)x
1
- k
2
x
2
= u (5.1a)
m
2
x
2
- k
2
x
1
+ (k
2
+ k
3
)x
2
= u (5.1b)
Let x
1
= X
1
cos t and hence x
1
= -X
1
sint and x
1
= -
2
X
1
cos t (5.2a)
x
2
x
1
m
1
m
2
k
1
k
2
k
3
m
1
m
2
k
1
x
1
k
2
(x
2
x
1
)
k
2
(x
2
x
1
)
K
3
x
2
m
1
x
1
m
2
x
2
Let x
2
= X
2
cos t and hence x
2
= -X
2
sint and x
2
= -
2
X
2
cos t (5.2b)
Substituting into equations 5.1a and 5.1b results in:
-m
1
2
X
1
cos t + (k
1
+ k
2
)X
1
cos t - k
2
X
2
cos t = u (v)
-m
2
2
X
2
cos t - k
2
X
1
cos t +(k
2
+ k
3
)X
2
cos t = u (vi)
Dividing through by cos t and results in:
|-m
1
2
+ k
1
+ k
2
]X
1
-k
2
X
2
= u (5.3a)
-k
2
X
1
+ |-m
2
2
+ k
2
+ k
3
]X
2
= u (5.3b)
In matrix form this can be expressed as:
_
-m
1
2
+ k
1
+ k
2
-k
2
-k
2
-m
2
2
+ k
2
+ k
3
_ _
X
1
X
2
_ = ]
u
u
(5.4)
The determinant for the matrix above is expressed as:
_
-m
1
2
+ k
1
+ k
2
-k
2
-k
2
-m
2
2
+ k
2
+ k
3
_ = u OR
(-m
1
2
+ k
1
+ k
2
)(-m
2
2
+ k
2
+ k
3
) - k
2
2
= u (5.5)
This determinant is known as the characteristic equation.
The solution of this equation can be expressed as:
m
1
m
2
4
- |(k
2
+ k
3
)m
1
+ (k
1
+ k
2
)m
2
]
2
+ |(k
1
+ k
2
) (k
2
+ k
3
) - k
2
2
] = u (5.6)
This is a quadratic equation in
2
which can be expressed as:
m
1
m
2
(
2
)
2
- |(k
2
+ k
3
)m
1
+ (k
1
+ k
2
)m
2
](
2
) + (k
1
k
2
+ k
1
k
3
+ k
2
k
3
) = u (5.7)
The solution can be written as:
2
1,2
=
|(k
2
+ k
3
)m
1
+ (k
1
+ k
2
)m
2
] _ |(k
2
+ k
3
)m
1
+ (k
1
+ k
2
)m
2
]
2
- 4m
1
m
2
(k
1
k
2
+ k
1
k
3
+ k
2
k
3
)
2m
1
m
2
(5.8a)
OR
2
1,2
=
b_
b
2
-4oc
2o
(5.8b)
Where a = m
1
m
2
, b = - [(k
2
+ k
3
)m
1
+ (k
1
+ k
2
)m
2
], and c = (k
1
k
2
+ k
1
k
3
+ k
2
k
3
)
And hence
2
1
=
-b+b
2
-4uc
2u
OR
1
=
_
-b+b
2
-4uc
2u
(5.9)
and
2
2
=
-b-b
2
-4uc
2u
OR
2
=
_
-b-b
2
-4uc
2u
(5.10)
Substitution of equation 5.9 into equation 5.4 gives the ratio, r
1
, of the amplitudes when =
1
.
The amplitudes are denoted by X
1
(1)
, and X
2
(1)
, where the superscript (1) are placed to indicate the
first mode of vibration relating to the speed =
1
. Substitution:
(-m
1
1
2
+ k
1
+ k
2
)X
1
(1)
- k
2
X
2
(1)
= u (From row 1) OR
- k
2
X
1
(1)
+ (-m
2
1
2
+ k
2
+ k
3
) X
2
(1)
= u (From row 2)
One of the equations should be used to determine the ratio. The ratio is given by:
r
1
=
X
2
(1)
X
1
(1)
_ =
(-m
1
1
2
+ k
1
+ k
2
)
-k
2
_ (5.11a)
OR r
1
=
-k
2
(-m
2
1
2
+ k
2
+ k
S
)
_
(5.11b)
Similarly, substitution of equation 5.10 into equation 5.4 gives the ratio of the amplitudes when
=
2
. The amplitudes are X
1
(2)
, and X
2
(2)
, and the superscript becomes (2). Substitution:
(-m
1
2
2
+k
1
+ k
2
)X
1
(2)
- k
2
X
2
(2)
= u (From row 1) OR
- k
2
X
1
(2)
+ (-m
2
2
2
+ k
2
+ k
3
) X
2
(2)
= u (From row 2)
Again only one equation should be used and the ratio is given by:
r
2
=
X
2
(2)
X
1
(2)
_ =
(-m
1
2
2
+ k
1
+ k
2
)
-k
2
_ (5.12a)
OR r
2
=
-k
2
(-m
2
2
2
+ k
2
+ k
S
)
_
(5.12b)
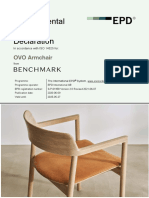
Mode shapes
Mode shapes show the typical relative positions of the masses, each with respect to its equilibrium
position. If r is positive, the masses are on the same direction of their equilibrium positions, and if
negative they fall on opposite sides.
Examples
l
2
k
2 k
1
l
1
G
M, k
x
k
2
k
1
G
1
2
-1
-2
r = 2
m
2
m
1
1
2
-1
-2
r = - 2
m
2
m
1
1
2
-1
-2
r = - 0.5
m
2
m
1
Consider the bar supported by two springs as in Fig 2xa above. As the bar vibrates it executes two
motions namely linear motion (up and down motion of the bar) and rotation about some centre. The
up and down motion is known as the bounce and the rotation, the spin. The coordinates x and can
be used to completely describe the motion of the bar. Consider the position when the bar has been
displaced downwards (positive) by x and the right hand side is displaced downwards (positive) by an
angle as in Fig 2xb. The free body diagram of the bar is shown in Fig 2x below.
For the equilibrium of the bar, the net of the forces in the spring must satisfy F = ma. Similarly the
moments must satisfy M
G
= J
G
, where J
G
is the moment of inertia of the bar about G, o = x and
o = 0
. The following equations can be formulated from the two conditions.
m x = -k
1
x
1
- k
2
x
2
(Negative because of upward direction of the forces) (i)
[
u
0
= (k
1
x
1
)l
1
- (k
2
x
2
)l
2
(Signs show directions of the moments) (ii)
From the free body diagram it can be seen that x
1
= (x l
1
) and x
2
= (x + l
2
). Substituting into
equations (i) and (ii) above and rearranging results in:
m x + k
1
( x - l
1
) + k
2
(x + l
2
) = u (iii)
[
u
0
- |k
1
( x - l
1
)]l
1
+ |k
2
(x + l
2
)]l
2
= u (iv)
OR
m x + (k
1
+ k
2
)x -(k
1
l
1
- k
2
l
2
) = u (5.13a)
[
u
0
- (k
1
l
1
- k
2
l
2
)x + (k
1
l
1
2
+ k
2
l
2
2
) = u (5.13b)
Let x = Xcos t and hence x = -Xsin t and x = -
2
Xcos t (5.14a)
Let = cos t and hence
= -sint and
= -
2
cos t (5.14b)
Substituting into equations 5.x and 5.x results in:
-m
1
2
Xcos t + (k
1
+ k
2
)Xcos t - (k
1
l
1
- k
2
l
2
)cos t = u (v)
-[
u
2
cos t - (k
1
l
1
-k
2
l
2
)Xcos t + (k
1
l
1
2
+ k
2
l
2
2
)cos t = u (vi)
k
1
x
1
k
2
x
2
x
x
1
x
2
l
1
l
2
Dividing through by cos t and rearranging leads to:
|-m
2
+ k
1
+ k
2
]X - (k
1
l
1
-k
2
l
2
) = u (5.15a)
-(k
1
l
1
- k
2
l
2
)X + |-[
u
2
+ k
1
l
1
2
+ k
2
l
2
2
] = u (5.15b)
In matrix form this can be expressed as:
_
(-m
2
+ k
1
+ k
2
) (k
1
l
1
-k
2
l
2
)
-(k
1
l
1
- k
2
l
2
) (-[
u
2
+ k
1
l
1
2
+ k
2
l
2
2
)
_ ]
X
= ]
u
u
(5.16)
The characteristic equation id then expressed as.
_
(-m
2
+k
1
+ k
2
) -(k
1
l
1
- k
2
l
2
)
-(k
1
l
1
- k
2
l
2
) (-[
u
2
+ k
1
l
1
2
+ k
2
l
2
2
)
_ = u OR
(-m
2
+ k
1
+ k
2
)(-[
u
2
+ k
1
l
1
2
+ k
2
l
2
2
) - (k
1
l
1
- k
2
l
2
)
2
= u (5.17)
m[
u
4
- |(k
1
l
1
2
+ k
2
l
2
2
)m+ (k
1
+ k
2
)[
u
]
2
+ j(k
1
+ k
2
) (k
1
l
1
2
+ k
2
l
2
2
) - (k
1
l
1
2
+
k
2
l
2
2
)
2
[
= u (5.18)
This equation can be expressed as:
o(
2
)
2
- b(
2
) + c = u (5.19)
Where: o = m[
u
, b = |(k
1
l
1
2
+ k
2
l
2
2
)m+ (k
1
+ k
2
)[
0
] onJ
c = j(k
1
+ k
2
) (k
1
l
1
2
+ k
2
l
2
2
) - (k
1
l
1
2
+ k
2
l
2
2
)
2
[
The solution can be written as:
2
1,2
=
b_
b
2
-4oc
2o
(5.20)
And hence
2
1
=
-b+b
2
-4uc
2u
OR
1
=
_
-b+b
2
-4uc
2u
(5.21)
and
2
2
=
-b-b
2
-4uc
2u
OR
2
=
_
-b-b
2
-4uc
2u
(5.22)
Substitution of equation 5.21 into equation 5.16 gives the ratio, r
1
, of the amplitudes when =
1
.
The amplitudes are denoted by X
(1)
, and
(1)
, where the superscript (1) are placed to indicate the
first mode of vibration relating to the speed =
1
. Substitution:
(-m
1
1
2
+ k
1
+ k
2
)X
(1)
- (k
1
l
1
- k
2
l
2
)
(1)
= u (From row 1) OR
- (k
1
l
1
- k
2
l
2
)X
(1)
+ (-[
u
1
2
+ k
1
l
1
2
+ k
2
l
2
2
)
(1)
= u (From row 2)
One of the equations should be used to determine the ratio. The ratio is given by:
r
1
=
(1)
X
(1)
_ =
(-m
1
1
2
+ k
1
+ k
2
)
-(k
1
l
1
- k
2
l
2
)
_
(5.23a)
OR r
1
=
-(k
1
l
1
- k
2
l
2
)
(-[
0
1
2
+ k
1
l
1
2
+ k
2
l
2
2
)
_ (5.23b)
Similarly, substitution of equation 5.22 into equation 5.16 gives the ratio of the amplitudes when
=
2
. The amplitudes are X
(2)
, and
(2)
, and the superscript denoting the second mode.
Substitution:
(-m
1
2
2
+k
1
+ k
2
)X
(2)
- (k
1
l
1
-k
2
l
2
)
(2)
= u (From row 1) OR
- (k
1
l
1
- k
2
l
2
)X
(2)
+ (-[
u
2
2
+ k
1
l
1
2
+k
2
l
2
2
)
(2)
= u (From row 2)
Again only one equation should be used and the ratio is given by:
r
2
=
(2)
X
(2)
_ =
(-m
1
2
2
+ k
1
+ k
2
)
-(k
1
l
1
- k
2
l
2
)
_
(5.24a)
OR r
2
=
-(k
1
l
1
- k
2
l
2
)
(-[
0
2
2
+ k
1
l
1
2
+ k
2
l
2
2
)
_ (5.24b)
Mode shapes
Mode shapes show the typical relative positions of the masses, each with respect to its equilibrium
position. If r is positive, the masses are on the same direction of their equilibrium positions, and if
negative they fall on opposite sides.
Examples
Vibration in structures
Structural work as in Fig 5.xa can be treated as vibration elements swinging from side to side as in
Fig 5.xb below. Each floor is taken as the mass element and the wall provides the spring
characteristics.
When the mass is attached to the lower end of the spring it deflects by from the position in Fig
1.x2a to that in Fig 1.2xb above.
Equations of motion, from equilibrium of the two masses:
m
1
x
1
= -k
1
x
1
+ k
2
(x
2
- x
1
) (i)
m
2
x
2
= -k
2
(x
2
- x
1
) (ii)
m
1
m
2
k
1
k
2
m
1
m
2
k
1
k
2
x
2
x
1
m
1
m
2
k
1
x
1
k
2
(x
2
x
1
)
k
2
(x
2
x
1
)
m
1
x
1
m
2
x
2
-1 1
-
0
r = 0.5
-1 2
1
0
r = - 1.5
m
1
x
1
+ k
1
x
1
- k
2
(x
2
- x
1
) = u (iii)
m
2
x
2
+ k
2
(x
2
- x
1
) = u (iv)
Rearranging gives:
m
1
x
1
+ (k
1
+ k
2
)x
1
- k
2
x
2
= u (5.1a)
m
2
x
2
- k
2
x
1
+ k
2
x
2
= u (5.1b)
Let x
1
= X
1
cos t and hence x
1
= -X
1
sint and x
1
= -
2
X
1
cos t (5.2a)
Let x
2
= X
2
cos t and hence x
2
= -X
2
sint and x
2
= -
2
X
2
cos t (5.2b)
Substituting into equations 5.1a and 5.1b results in:
-m
1
2
X
1
cos t + (k
1
+ k
2
)X
1
cos t - k
2
X
2
cos t = u (v)
-m
2
2
X
2
cos t - k
2
X
1
cos t +k
2
x
2
X
2
cos t = u (vi)
Dividing through by cos t and results in:
|-m
1
2
+ k
1
+ k
2
]X
1
-k
2
X
2
= u (5.3a)
-k
2
X
1
+ |-m
2
2
+ k
2
]X
2
= u (5.3b)
In matrix form this can be expressed as:
_
-m
1
2
+ k
1
+ k
2
-k
2
-k
2
-m
2
2
+ k
2
_ _
X
1
X
2
_ = ]
u
u
(5.4)
The determinant for the matrix above is expressed as:
_
-m
1
2
+ k
1
+ k
2
-k
2
-k
2
-m
2
2
+ k
2
_ = u OR
(-m
1
2
+ k
1
+ k
2
)(-m
2
2
+ k
2
) - k
2
2
= u (5.5)
This determinant is known as the characteristic equation.
The solution of this equation can be expressed as:
m
1
m
2
4
- |k
2
m
1
+ (k
1
+ k
2
)m
2
]
2
+ |(k
1
+ k
2
) k
2
- k
2
2
] = u (5.6)
This is a quadratic equation in
2
which can be expressed as:
m
1
m
2
(
2
)
2
- |k
2
m
1
+ (k
1
+ k
2
)m
2
](
2
) + k
1
k
2
= u (5.7)
The solution can be written as:
2
1,2
=
|k
2
m
1
+ (k
1
+ k
2
)m
2
] _|k
2
m
1
+ (k
1
+ k
2
)m
2
]
2
- 4m
1
m
2
(k
1
k
2
)
2m
1
m
2
(5.8a)
OR
2
1,2
=
b_
b
2
-4oc
2o
(5.8b)
Where a = m
1
m
2
, b = - [(k
2
)m
1
+ (k
1
+ k
2
)m
2
], and c = (k
1
k
2
)
And hence
2
1
=
-b+b
2
-4uc
2u
OR
1
=
_
-b+b
2
-4uc
2u
(5.9)
and
2
2
=
-b-b
2
-4uc
2u
OR
2
=
_
-b-b
2
-4uc
2u
(5.10)
Substitution of equation 5.9 into equation 5.4 gives the ratio, r
1
, of the amplitudes when =
1
.
The amplitudes are denoted by X
1
(1)
, and X
2
(1)
, where the superscript (1) are placed to indicate the
first mode of vibration relating to the speed =
1
. Substitution:
(-m
1
1
2
+ k
1
+ k
2
)X
1
(1)
- k
2
X
2
(1)
= u (From row 1) OR
- k
2
X
1
(1)
+ (-m
2
1
2
+ k
2
) X
2
(1)
= u (From row 2)
One of the equations should be used to determine the ratio. The ratio is given by:
r
1
=
X
2
(1)
X
1
(1)
_ =
(-m
1
1
2
+ k
1
+ k
2
)
-k
2
_ (5.11a)
OR r
1
=
-k
2
(-m
2
1
2
+ k
2
)
_
(5.11b)
Similarly, substitution of equation 5.10 into equation 5.4 gives the ratio of the amplitudes when
=
2
. The amplitudes are X
1
(2)
, and X
2
(2)
, and the superscript becomes (2). Substitution:
(-m
1
2
2
+k
1
+ k
2
)X
1
(2)
- k
2
X
2
(2)
= u (From row 1) OR
- k
2
X
1
(2)
+ (-m
2
2
2
+ k
2
) X
2
(2)
= u (From row 2)
Again only one equation should be used and the ratio is given by:
r
2
=
X
2
(2)
X
1
(2)
_ =
(-m
1
2
2
+ k
1
+ k
2
)
-k
2
_ (5.12a)
OR r
2
=
-k
2
(-m
2
2
2
+ k
2
)
_
(5.12b)
When the mass is attached to the lower end of the spring it deflects by from the position in Fig
1.x2a to that in Fig 1.2xb above.
Equations of motion, from equilibrium of the two masses:
[
1
1
= -k
t1
1
+ k
t2
(
2
-
1
) (i)
[
2
2
= -k
t2
(
2
-
1
) - k
t3
2
(ii)
J
1
0
1
J
1
k
t1
(0
2
-0
1
)
k
t1
0
1
J
2
0
2
J
2
k
t1
(0
2
-0
1
)
k
t3
0
2
k
t3
2
J
1
J
2
k
t2 k
t1
[
1
1
+ k
t1
1
- k
t2
(
2
-
1
) = u (iii)
[
2
2
+k
t2
(
2
-
1
) + k
t3
2
= u (iv)
Rearranging gives:
[
1
1
+ (k
t1
+ k
t2
)
1
- k
t2
2
= u (5.1a)
[
2
2
-k
t2
1
+(k
t2
+ k
t3
)
2
= u (5.1b)
Let
1
=
1
cos t and hence
1
= -
1
sint and
1
= -
2
1
cos t (5.2a)
Let
2
=
2
cos t and hence
2
= -
2
sint and
2
= -
2
2
cos t (5.2b)
Substituting into equations 5.1a and 5.1b results in:
-[
1
1
cos t + (k
t1
+ k
t2
)
1
cos t - k
t2
2
cos t = u (v)
-[
2
2
cos t - k
t2
1
cos t + (k
t2
+ k
t3
)
2
cos t = u (vi)
Dividing through by cos t and results in:
|-[
1
2
+ k
t1
+ k
t2
]
1
-k
t2
2
= u (5.3a)
-k
t2
1
+|-[
2
2
+ k
t2
+ k
t3
]
2
= u (5.3b)
In matrix form this can be expressed as:
_
-[
1
2
+ k
t1
+ k
t2
-k
t2
-k
t2
-[
2
2
+ k
t2
+ k
t3
_ _
2
_ = ]
u
u
(5.4)
The determinant for the matrix above is expressed as:
_
-[
1
2
+ k
t1
+ k
t2
-k
t2
-k
t2
-[
2
2
+ k
t2
+ k
t3
_ = u OR
(-[
1
2
+ k
t1
+ k
t2
)(-[
2
2
+ k
t2
+ k
t3
) - k
2
2
= u (5.5)
This determinant is known as the characteristic equation.
The solution of this equation can be expressed as:
[
1
[
2
4
- |(k
t2
+ k
t3
)[
1
+ (k
t1
+ k
t2
)[
2
]
2
+ |(k
t1
+ k
t2
) (k
t2
+ k
t3
) - k
t2
2
] = u (5.6)
This is a quadratic equation in
2
which can be expressed as:
[
1
[
2
(
2
)
2
- |(k
t2
+ k
t3
)[
1
+ (k
t1
+ k
t2
)[
2
](
2
) + (k
t1
k
t2
+ k
t1
k
t3
+ k
t2
k
t3
) = u (5.7)
The solution can be written as:
OR
2
1,2
=
b_
b
2
-4oc
2o
(5.8b)
Where a = m
1
m
2
, b = - [(k
t2
+ k
t3
)J
1
+ (k
t1
+ k
t2
)J
2
], and c = (k
t1
k
t2
+ k
t1
k
t3
+ k
t2
k
t3
)
And hence
2
1
=
-b+b
2
-4uc
2u
OR
1
=
_
-b+b
2
-4uc
2u
(5.9)
and
2
2
=
-b-b
2
-4uc
2u
OR
2
=
_
-b-b
2
-4uc
2u
(5.10)
Substitution of equation 5.9 into equation 5.4 gives the ratio, r
1
, of the amplitudes when =
1
.
The amplitudes are denoted by X
1
(1)
, and X
2
(1)
, where the superscript (1) are placed to indicate the
first mode of vibration relating to the speed =
1
. Substitution:
(-[
1
1
2
+ k
t1
+ k
t2
)
1
(1)
-k
t2
2
(1)
= u (From row 1) OR
- k
t2
1
(1)
+ (-[
2
1
2
+ k
t2
+ k
t3
)
2
(1)
= u (From row 2)
One of the equations should be used to determine the ratio. The ratio is given by:
r
1
=
2
(1)
1
(1)
_ =
(-[
1
1
2
+ k
t1
+ k
t2
)
-k
t2
_
(5.11a)
OR r
1
=
-k
t2
[-[
2
1
2
+ k
t2
+ k
tS
_
(5.11b)
Similarly, substitution of equation 5.10 into equation 5.4 gives the ratio of the amplitudes when
=
2
. The amplitudes are X
1
(2)
, and X
2
(2)
, and the superscript becomes (2). Substitution:
(-[
1
2
2
+ k
t1
+ k
t2
)
1
(2)
- k
2
2
(2)
= u (From row 1) OR
- k
t2
1
(2)
+ (-[
2
2
2
+ k
t2
+ k
t3
)
2
(2)
= u (From row 2)
Again only one equation should be used and the ratio is given by:
r
2
=
2
(2)
1
(2)
_ =
(-[
1
2
2
+ k
t1
+ k
t2
)
-k
t2
_
(5.12a)
OR r
2
=
-k
t2
[-[
2
2
2
+ k
t2
+ k
tS
_
(5.12b)
Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Application of SPACE MatrixДокумент11 страницApplication of SPACE Matrixdecker444975% (4)
- LAB Find Out The Bottle ContentsДокумент4 страницыLAB Find Out The Bottle ContentschanОценок пока нет
- Alternatoer Lvsi804s WDG 12 v9 TdsДокумент8 страницAlternatoer Lvsi804s WDG 12 v9 TdsCris_eu09Оценок пока нет
- Chrysler Dodge Ram Jeep Drive Cycle InformationДокумент2 страницыChrysler Dodge Ram Jeep Drive Cycle InformationslpkthОценок пока нет
- Unit 12 BriefДокумент7 страницUnit 12 Briefapi-477397447Оценок пока нет
- 8 3ThingWorxInstallation 1 0 174675 PDFДокумент157 страниц8 3ThingWorxInstallation 1 0 174675 PDFAuditio MandhanyОценок пока нет
- 12.3 What Is The Nomenclature System For CFCS/HCFCS/HFCS? (Chemistry)Документ3 страницы12.3 What Is The Nomenclature System For CFCS/HCFCS/HFCS? (Chemistry)Riska IndriyaniОценок пока нет
- Answer KeyДокумент4 страницыAnswer KeyLouina YnciertoОценок пока нет
- Proac Studio 100: Monitor Level Performance From An Established Compact DesignДокумент2 страницыProac Studio 100: Monitor Level Performance From An Established Compact DesignAnonymous c3vuAsWAОценок пока нет
- Algorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, SilverkiteДокумент3 страницыAlgorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, Silverkitesiper34606Оценок пока нет
- Math Habits of MindДокумент12 страницMath Habits of MindAzmi SallehОценок пока нет
- THE PERFECT DAY Compressed 1 PDFДокумент218 страницTHE PERFECT DAY Compressed 1 PDFMariaОценок пока нет
- S P 01958 Version 2 EPD OVO ArmchairДокумент16 страницS P 01958 Version 2 EPD OVO ArmchairboiОценок пока нет
- Action Research in Araling PanlipunanДокумент3 страницыAction Research in Araling PanlipunanLotisBlanca94% (17)
- Homeopatia Vibracional RatesДокумент45 страницHomeopatia Vibracional RatesAugusto Bd100% (4)
- The Four Types of Gaps and How To Play Them PDFДокумент17 страницThe Four Types of Gaps and How To Play Them PDFshaikiftakar100% (2)
- MatrixДокумент4 страницыMatrixReni Anggraini100% (1)
- High School Department PAASCU Accredited Academic Year 2017 - 2018Документ6 страницHigh School Department PAASCU Accredited Academic Year 2017 - 2018Kevin T. OnaroОценок пока нет
- AMC Middle Primary Years 3 and 4 - SolutionsДокумент6 страницAMC Middle Primary Years 3 and 4 - SolutionsSherry JiangОценок пока нет
- Bluesil Ep 150 A3: Insulator Grade Silicone RubberДокумент2 страницыBluesil Ep 150 A3: Insulator Grade Silicone RubberNagendra KumarОценок пока нет
- The Senior High School in The Phillipines: The Way To The WorldДокумент5 страницThe Senior High School in The Phillipines: The Way To The WorldRodel Ramos DaquioagОценок пока нет
- Bach Polonaise G Min BWV 119 A4Документ1 страницаBach Polonaise G Min BWV 119 A4vincenzovaiaОценок пока нет
- FacebookДокумент2 страницыFacebookAbhijeet SingareОценок пока нет
- Detailed Lesson Plan (DLP) Format: Learning Competency/iesДокумент1 страницаDetailed Lesson Plan (DLP) Format: Learning Competency/iesErma JalemОценок пока нет
- 50 Interview Question Code Galatta - HandbookДокумент16 страниц50 Interview Question Code Galatta - HandbookSai DhanushОценок пока нет
- ADAPT-Builder 2019 GUI Quick Reference GuideДокумент103 страницыADAPT-Builder 2019 GUI Quick Reference GuideephremОценок пока нет
- Liquid Process Piping - Part 1 General Piping Design PDFДокумент33 страницыLiquid Process Piping - Part 1 General Piping Design PDFnitin guptaОценок пока нет
- 1939 - Hammer - Terrain Corrections For Gravimeter StationsДокумент11 страниц1939 - Hammer - Terrain Corrections For Gravimeter Stationslinapgeo09100% (1)
- Month Puzzle Two VariableДокумент6 страницMonth Puzzle Two VariableNayan KaithwasОценок пока нет
- Roles of Community Health NursingДокумент2 страницыRoles of Community Health Nursingdy kimОценок пока нет