Вам также может понравиться
- SOW Fabrikasi C-335-01 - 19.116.1Документ1 страницаSOW Fabrikasi C-335-01 - 19.116.1AlfanОценок пока нет
- Gas Pipeline and Gas Metering and Regulating Station ProjectДокумент18 страницGas Pipeline and Gas Metering and Regulating Station ProjectAnonymous 7vljJzH100% (1)
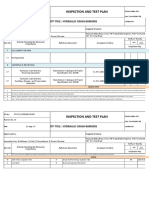
- ITP For Hydraulic BarrierДокумент4 страницыITP For Hydraulic Barriermoytabura96Оценок пока нет
- D-Erection Manual MAGHREB-SP-SMPДокумент357 страницD-Erection Manual MAGHREB-SP-SMPYoussef EL HamraouiОценок пока нет
- SAMPLE - P4A-Daily Progress Report 210427 KZP 988Документ3 страницыSAMPLE - P4A-Daily Progress Report 210427 KZP 988MEMOОценок пока нет
- Stationary Equipment Procedure (Pack 1)Документ5 страницStationary Equipment Procedure (Pack 1)Farhan SheikhОценок пока нет
- Boiler Hydro TestДокумент2 страницыBoiler Hydro TestKarthi KeyanОценок пока нет
- Spherical TankДокумент30 страницSpherical TankNuzuliana EnuzОценок пока нет
- Chemical Resistance (LLDPE) PDFДокумент24 страницыChemical Resistance (LLDPE) PDFrubyshreeОценок пока нет
- MS For Fabrication of Above-Ground Storage TankДокумент8 страницMS For Fabrication of Above-Ground Storage Tankdadz mingiОценок пока нет
- A1.2.3 Method Statement 4a Redacted Version2Документ98 страницA1.2.3 Method Statement 4a Redacted Version2ChanelОценок пока нет
- Weight Factors For Mechanical Equipment Installation WorkДокумент2 страницыWeight Factors For Mechanical Equipment Installation WorkMd Izzuddin OmarОценок пока нет
- Pump Commissioning Checklist - SafetyCultureДокумент3 страницыPump Commissioning Checklist - SafetyCultureMaxmore KarumamupiyoОценок пока нет
- NCTL Project: Proposal Welding Procedure SpecificationДокумент4 страницыNCTL Project: Proposal Welding Procedure SpecificationRotimi Shitta-BeyОценок пока нет
- How To Do A Tie-InДокумент2 страницыHow To Do A Tie-Inrenjithv_4100% (1)
- MNT-INTG-2007OP - Maintenance Welding InspectionДокумент43 страницыMNT-INTG-2007OP - Maintenance Welding InspectionNatarajan MurugesanОценок пока нет
- 7560-Hydro Test - Sequence 1Документ9 страниц7560-Hydro Test - Sequence 1Bala MuruganОценок пока нет
- WPQ TemplateДокумент1 страницаWPQ Templatejoshrathburn1980Оценок пока нет
- KP-00+++-CQ712-G0011 - Rev.0 - ITP For For Cathodic Protection WorksДокумент7 страницKP-00+++-CQ712-G0011 - Rev.0 - ITP For For Cathodic Protection WorksUtku Can KılıçОценок пока нет
- PWHT Job Card For p91 Butt Weld 14'' SupportДокумент2 страницыPWHT Job Card For p91 Butt Weld 14'' Support9703422499Оценок пока нет
- Sky Scraper SampleДокумент1 страницаSky Scraper SamplereghouacheОценок пока нет
- Approved Weld Procedure SpecificationsДокумент38 страницApproved Weld Procedure SpecificationsJohan0001Оценок пока нет
- Client Approval Remarks: Rev Date Descriptions Prepared by Reviewed by Approved byДокумент7 страницClient Approval Remarks: Rev Date Descriptions Prepared by Reviewed by Approved bySARSAN NDTОценок пока нет
- Jacking Procedurefor Construction of Tanks OLDДокумент10 страницJacking Procedurefor Construction of Tanks OLDVikram RangasamyОценок пока нет
- Checklist For Fifi Installation and StartupДокумент2 страницыChecklist For Fifi Installation and StartupTa Bon0% (1)
- ROS-020 Edition 2015 Rev 00-2015 - Scaffold PDFДокумент24 страницыROS-020 Edition 2015 Rev 00-2015 - Scaffold PDFFayaz MohammedОценок пока нет
- Weld ShrinkageДокумент16 страницWeld ShrinkageWeff JingОценок пока нет
- ES.5.06.0001 RA - PressureVesselsДокумент28 страницES.5.06.0001 RA - PressureVesselsJagadeesh PuppalaОценок пока нет
- Package 2s E0001 - Jupiter DCR 30-10-2021Документ96 страницPackage 2s E0001 - Jupiter DCR 30-10-2021senthilОценок пока нет
- T 2171 - Diesel Storage TankДокумент2 страницыT 2171 - Diesel Storage TankHuynh Thanh TamОценок пока нет
- Inspection Request: Report #: RE/INRQ/ Date: 24-Sep-17 Page: 1 of 1Документ1 страницаInspection Request: Report #: RE/INRQ/ Date: 24-Sep-17 Page: 1 of 1mansih457Оценок пока нет
- Document Title: Technical Proposal For 6500cbm LNG Storage TankДокумент4 страницыDocument Title: Technical Proposal For 6500cbm LNG Storage Tankroni_arsyahОценок пока нет
- List of Nozzles List of Nozzles: T T 1 T T 1Документ1 страницаList of Nozzles List of Nozzles: T T 1 T T 1גרבר פליקס100% (1)
- Elding Rocedure Pecification: 7200-HDPE Butt WeldДокумент2 страницыElding Rocedure Pecification: 7200-HDPE Butt Weldsamer8saifОценок пока нет
- Daily Report - XLSX 01Документ1 страницаDaily Report - XLSX 01kishoryawaleОценок пока нет
- SECTION 16270 Transformers Rev 0Документ26 страницSECTION 16270 Transformers Rev 0syedanwerОценок пока нет
- Maintenance and User Manual: Borehole TV Camera Inspection System Setting Up InstructionsДокумент21 страницаMaintenance and User Manual: Borehole TV Camera Inspection System Setting Up InstructionsFranklin L SilvaОценок пока нет
- Inspection Storage Tank STD 129Документ42 страницыInspection Storage Tank STD 129Sanath Kumar100% (1)
- Release For GroutingДокумент1 страницаRelease For GroutingUmair AwanОценок пока нет
- Installation of Columns: Installation Recommendations For Precast Reinforced Concrete Production Edition 1 September 2008Документ14 страницInstallation of Columns: Installation Recommendations For Precast Reinforced Concrete Production Edition 1 September 2008j_herndz100% (1)
- Pressure Vessel Dimension Inspection PDFДокумент17 страницPressure Vessel Dimension Inspection PDFEqubal KhanОценок пока нет
- Pressure Vessel Hydrotest Procedure - Google SearchДокумент3 страницыPressure Vessel Hydrotest Procedure - Google SearchAsad KhanОценок пока нет
- Method Statement: Al-Khafji FDP Phase-I Onshore FacilitiesДокумент8 страницMethod Statement: Al-Khafji FDP Phase-I Onshore FacilitiesSiddiqui Muhammad AshfaqueОценок пока нет
- Tank Fabrication & ErectionДокумент72 страницыTank Fabrication & ErectionPramod GrОценок пока нет
- How To Write A Welding Procedure Specification (WPS)Документ5 страницHow To Write A Welding Procedure Specification (WPS)Mohamed Atef100% (1)
- Method Statement For CW INTAKE SCREEN WASH WATER SYSTEM FLUSHING BL.1 5 PDFДокумент8 страницMethod Statement For CW INTAKE SCREEN WASH WATER SYSTEM FLUSHING BL.1 5 PDFFredie UnabiaОценок пока нет
- Manufacturing Quality Plan For Tank: FGD Sysyem, 2X550 MW TpsДокумент4 страницыManufacturing Quality Plan For Tank: FGD Sysyem, 2X550 MW TpsBhanu Pratap ChoudhuryОценок пока нет
- Flange Joint Box-UpДокумент1 страницаFlange Joint Box-UpJR MohanОценок пока нет
- Curriculum Vitae: Professional ExperienceДокумент5 страницCurriculum Vitae: Professional ExperiencemanojballaОценок пока нет
- API-1000-11 Rev 0Документ3 страницыAPI-1000-11 Rev 0Mahesh MishraОценок пока нет
- PDS - EP-10 Etch PrimerДокумент2 страницыPDS - EP-10 Etch Primercarlogeretto2Оценок пока нет
- Pamphlet TG-X SeriesДокумент2 страницыPamphlet TG-X SeriesrajeshОценок пока нет
- Storage Tank Foundation Settlement Quality Control and Inspection Report FormДокумент1 страницаStorage Tank Foundation Settlement Quality Control and Inspection Report FormKhepa BabaОценок пока нет
- Static and Rotating Equipment PDFДокумент4 страницыStatic and Rotating Equipment PDFjpr220022Оценок пока нет
- Job Procedure For Tanks Radiography Test: 10 of Ramadan City, Industrial Area A1, EgyptДокумент13 страницJob Procedure For Tanks Radiography Test: 10 of Ramadan City, Industrial Area A1, EgyptShubham ShuklaОценок пока нет
- Final - Commercial & SOR-Vol IДокумент86 страницFinal - Commercial & SOR-Vol IengharshОценок пока нет
- Fabrication Tracking Sheet (29-June 4.00 AmДокумент9 страницFabrication Tracking Sheet (29-June 4.00 Amvishal bailurОценок пока нет
- Welding Procedure Specification (WPS) : Joint Design PositionДокумент9 страницWelding Procedure Specification (WPS) : Joint Design PositionpetermanroelibraryОценок пока нет
- Electric Actuators: Technical Manual FORДокумент42 страницыElectric Actuators: Technical Manual FORSouvik DaluiОценок пока нет
- Container DesignДокумент13 страницContainer Designmdk50100% (10)
- Best Practice Guide (Mechanical Insulation)Документ158 страницBest Practice Guide (Mechanical Insulation)Sky LarksОценок пока нет
- PSB 07 - Origen - Scrieri Alese, Partea A DouaДокумент528 страницPSB 07 - Origen - Scrieri Alese, Partea A DouaGabriel100% (4)
- Catalog Rominserv Valves IaifoДокумент0 страницCatalog Rominserv Valves IaifoClaudiu DinuОценок пока нет
- SF - Ioan Gura de Aur - Omilii La Facere - Vol. IIДокумент364 страницыSF - Ioan Gura de Aur - Omilii La Facere - Vol. IIMarkTM100% (5)
- SF - Ioan Gura de Aur - Omilii La Facere - Vol. IДокумент444 страницыSF - Ioan Gura de Aur - Omilii La Facere - Vol. IMarkTM100% (12)
- SF - Ioan Gura de Aur - Omilii La Facere - Vol. IДокумент444 страницыSF - Ioan Gura de Aur - Omilii La Facere - Vol. IMarkTM100% (12)
- ArchiCAD Step by StepДокумент154 страницыArchiCAD Step by Stepfrankiesaybook100% (1)
- Gwen White - Perspective - A Guide For Artists, Architects and DesignersДокумент80 страницGwen White - Perspective - A Guide For Artists, Architects and DesignersJérémy TrillesОценок пока нет
- Cathodic Protection For Storage Tanks and Buried PipingДокумент62 страницыCathodic Protection For Storage Tanks and Buried PipingBalakumar100% (1)
- Civil - Structuri Static Determinate M.E. TeodorescuДокумент120 страницCivil - Structuri Static Determinate M.E. Teodorescumdk50Оценок пока нет
- Aço Sa 537 cl1Документ23 страницыAço Sa 537 cl1pcorreia68100% (1)
- M Mooddeell 669900Xxvv: Iinnssttaallllaattiioonn G GuuiiddeeДокумент28 страницM Mooddeell 669900Xxvv: Iinnssttaallllaattiioonn G Guuiiddeemdk50Оценок пока нет
- Battery TipsДокумент2 страницыBattery TipsSripath RoyОценок пока нет
- User Guide Compact NSXM - SchneiderДокумент88 страницUser Guide Compact NSXM - SchneiderSomnath DasОценок пока нет
- CSS 9 Curriculum Map FINALДокумент3 страницыCSS 9 Curriculum Map FINALDon Besic100% (1)
- Css11 4th Quarter l3Документ8 страницCss11 4th Quarter l3RGS MagsОценок пока нет
- Lab 2 - Muhd Haziq Sufi - F1128Документ10 страницLab 2 - Muhd Haziq Sufi - F1128Muhamad HaziqОценок пока нет
- Test Results of Pile Load TestДокумент9 страницTest Results of Pile Load TestMYTHRI INFRA VIZAGОценок пока нет
- Bathy 500 MFДокумент58 страницBathy 500 MFJohn E Cutipa LОценок пока нет
- User Manual: Ggcad, Fast and Easy CNCДокумент34 страницыUser Manual: Ggcad, Fast and Easy CNCasritaipОценок пока нет
- Spruhj 1 CДокумент482 страницыSpruhj 1 CthietdaucongОценок пока нет
- DAVIS CMS UF Catalog V4.18Документ18 страницDAVIS CMS UF Catalog V4.18Xin XiОценок пока нет
- Is 6821 1973Документ12 страницIs 6821 1973sarath6725Оценок пока нет
- Interpreting Tables and ChartsДокумент3 страницыInterpreting Tables and ChartsLILIAN ROSE DE LARAОценок пока нет
- CTS-9006 CTS-9009 Operation Manual v1.4 ReleaseДокумент93 страницыCTS-9006 CTS-9009 Operation Manual v1.4 ReleaseRoberto Chang Palma100% (2)
- Turbo Pascal Version 4.0 Owners Manual 1987 PDFДокумент715 страницTurbo Pascal Version 4.0 Owners Manual 1987 PDFRian MagsОценок пока нет
- Connections For Supported MMDVM BoardsДокумент1 страницаConnections For Supported MMDVM BoardsFABIANОценок пока нет
- 8dio Borosilicate Bells Read MeДокумент8 страниц8dio Borosilicate Bells Read MebizzysgsОценок пока нет
- GraphMasterPro0303 780 1119 12Документ146 страницGraphMasterPro0303 780 1119 12OMATОценок пока нет
- Drive Calculator ManualДокумент22 страницыDrive Calculator ManualDemetrio Hinojosa EОценок пока нет
- Examples Femap 1031Документ492 страницыExamples Femap 1031Cesar Gonzalez MurilloОценок пока нет
- Cisco Catalyst Blade Switch 3020 SW Configuration GuideДокумент1 036 страницCisco Catalyst Blade Switch 3020 SW Configuration GuideAhmed Abd El-KawyОценок пока нет
- Panaview Usersmanual Revf EnglishДокумент124 страницыPanaview Usersmanual Revf EnglishGarcia RaulОценок пока нет
- 40 EfozДокумент68 страниц40 Efozduc hai phamОценок пока нет
- Horizon Manual For IVUEДокумент14 страницHorizon Manual For IVUEGabriel MoyaОценок пока нет
- Yamaha R6 2007 Varios Modelos PDFДокумент538 страницYamaha R6 2007 Varios Modelos PDFCARLOSОценок пока нет
- Seminarski CPUДокумент10 страницSeminarski CPUnfix007Оценок пока нет
- HCF4018Документ12 страницHCF4018jnax101Оценок пока нет
- About Internet Using Mobile Phone: Wednesday December 5th, 2007 - , ,, CategoryДокумент4 страницыAbout Internet Using Mobile Phone: Wednesday December 5th, 2007 - , ,, CategoryNafisul AbrarОценок пока нет
- Amiga BASIC - eBook-ENG PDFДокумент314 страницAmiga BASIC - eBook-ENG PDFTajana KlaricОценок пока нет
- Juno T41 Android UserGuide Rev1Документ44 страницыJuno T41 Android UserGuide Rev1Levi StrausОценок пока нет
- Figure 1 - Creating A Blank SolutionДокумент14 страницFigure 1 - Creating A Blank SolutionBernadus PranataОценок пока нет