Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Group 4 HR201 Last Case StudyДокумент3 страницыGroup 4 HR201 Last Case StudyMatt Tejada100% (2)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
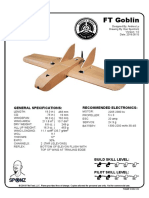
- FT Goblin Full SizeДокумент7 страницFT Goblin Full SizeDeakon Frost100% (1)
- Prestressing ProductsДокумент40 страницPrestressing ProductsSakshi Sana100% (1)
- Banas Dairy ETP Training ReportДокумент38 страницBanas Dairy ETP Training ReportEagle eye0% (2)
- 2.8 V6 5V (Aha & Atq)Документ200 страниц2.8 V6 5V (Aha & Atq)Vladimir Socin ShakhbazyanОценок пока нет
- Prog Lang PosterДокумент1 страницаProg Lang PosterEric RosalesОценок пока нет
- The Anatomy of Programming LanguagesДокумент623 страницыThe Anatomy of Programming Languageseliphant0723100% (2)
- Signals Samples and Stuff - A DSP PrimerДокумент11 страницSignals Samples and Stuff - A DSP PrimerAnonymous UZ5xA8Оценок пока нет
- Electronic Instrumentation 2nd Edition by P.P.L. RegtienДокумент413 страницElectronic Instrumentation 2nd Edition by P.P.L. Regtiensandeepuae100% (7)
- 1970 On The Theoretical and Experimental Determination of The Electromagnetic Torque in Electrical MachinesДокумент174 страницы1970 On The Theoretical and Experimental Determination of The Electromagnetic Torque in Electrical MachinesAnonymous UZ5xA8Оценок пока нет
- LabviewДокумент47 страницLabviewVijaya Shree100% (10)
- Understanding The Fast Fourier TransformДокумент186 страницUnderstanding The Fast Fourier TransformAnonymous UZ5xA8Оценок пока нет
- Understanding The Fast Fourier TransformДокумент186 страницUnderstanding The Fast Fourier TransformAnonymous UZ5xA8Оценок пока нет
- Fourier Transform - Signal ProcessingДокумент366 страницFourier Transform - Signal ProcessingAnonymous UZ5xA8Оценок пока нет
- Modelling of Dynamic Ductile Fracture and Application To TheДокумент27 страницModelling of Dynamic Ductile Fracture and Application To TheChana PalominoОценок пока нет
- 1993 Synchronous Generator Stability As Affected by Tie-Line Reactance !!Документ5 страниц1993 Synchronous Generator Stability As Affected by Tie-Line Reactance !!Anonymous UZ5xA8Оценок пока нет
- 1928 The Calculation of The Armature Reactance !!Документ20 страниц1928 The Calculation of The Armature Reactance !!Anonymous UZ5xA8Оценок пока нет
- LabviewДокумент47 страницLabviewVijaya Shree100% (10)
- The Key Reactances of Synchronous MachinesДокумент22 страницыThe Key Reactances of Synchronous MachinesAnonymous UZ5xA8Оценок пока нет
- LTspiceIV FlyerДокумент2 страницыLTspiceIV FlyerAnonymous UZ5xA8Оценок пока нет
- 1926 Variable Armature Leakage Reactance !!Документ6 страниц1926 Variable Armature Leakage Reactance !!Anonymous UZ5xA8Оценок пока нет
- LTspiceGettingStartedGuide PDFДокумент53 страницыLTspiceGettingStartedGuide PDFRichard ZerpaОценок пока нет
- Catia-Mechanism DesignДокумент37 страницCatia-Mechanism DesignMeriç AkyüzОценок пока нет
- Individual Differences: Mental Ability, Personality and DemographicsДокумент22 страницыIndividual Differences: Mental Ability, Personality and DemographicsAlera Kim100% (2)
- Ieee Research Papers On Software Testing PDFДокумент5 страницIeee Research Papers On Software Testing PDFfvgjcq6a100% (1)
- Green Management: Nestlé's Approach To Green Management 1. Research and DevelopmentДокумент6 страницGreen Management: Nestlé's Approach To Green Management 1. Research and DevelopmentAbaidullah TanveerОценок пока нет
- OBHR Case StudyДокумент8 страницOBHR Case StudyYvonne TanОценок пока нет
- Tata Group's Global Expansion and Business StrategiesДокумент23 страницыTata Group's Global Expansion and Business Strategiesvgl tamizhОценок пока нет
- Beams On Elastic Foundations TheoryДокумент15 страницBeams On Elastic Foundations TheoryCharl de Reuck100% (1)
- Haryana Retial GarmentsДокумент8 страницHaryana Retial Garmentssudesh.samastОценок пока нет
- Introduction To Succession-1Документ8 страницIntroduction To Succession-1amun dinОценок пока нет
- Usa Easa 145Документ31 страницаUsa Easa 145Surya VenkatОценок пока нет
- Sop EcuДокумент11 страницSop Ecuahmed saeedОценок пока нет
- CASE DigeSTДокумент2 страницыCASE DigeSTZepht BadillaОценок пока нет
- AnkitДокумент24 страницыAnkitAnkit MalhotraОценок пока нет
- Internship Report Recruitment & Performance Appraisal of Rancon Motorbikes LTD, Suzuki Bangladesh BUS 400Документ59 страницInternship Report Recruitment & Performance Appraisal of Rancon Motorbikes LTD, Suzuki Bangladesh BUS 400Mohammad Shafaet JamilОценок пока нет
- Information Pack For Indonesian Candidate 23.06.2023Документ6 страницInformation Pack For Indonesian Candidate 23.06.2023Serevinna DewitaОценок пока нет
- AWC SDPWS2015 Commentary PrintableДокумент52 страницыAWC SDPWS2015 Commentary PrintableTerry TriestОценок пока нет
- Product Manual 36693 (Revision D, 5/2015) : PG Base AssembliesДокумент10 страницProduct Manual 36693 (Revision D, 5/2015) : PG Base AssemblieslmarcheboutОценок пока нет
- MN AG v. SANOFI - 3:18-cv-14999 - Defendants' Joint Motion To Dismiss - 2019-08-12Документ124 страницыMN AG v. SANOFI - 3:18-cv-14999 - Defendants' Joint Motion To Dismiss - 2019-08-12The Type 1 Diabetes Defense FoundationОценок пока нет
- PTAS-11 Stump - All About Learning CurvesДокумент43 страницыPTAS-11 Stump - All About Learning CurvesinSowaeОценок пока нет
- AKTA MERGER (FINAL) - MND 05 07 2020 FNLДокумент19 страницAKTA MERGER (FINAL) - MND 05 07 2020 FNLNicoleОценок пока нет
- Philippine Architecture, Film Industry EvolutionДокумент4 страницыPhilippine Architecture, Film Industry EvolutionCharly Mint Atamosa IsraelОценок пока нет
- Sav 5446Документ21 страницаSav 5446Michael100% (2)
- Meanwhile Elsewhere - Lizzie Le Blond.1pdfДокумент1 страницаMeanwhile Elsewhere - Lizzie Le Blond.1pdftheyomangamingОценок пока нет
- Bunkering Check List: Yacht InformationДокумент3 страницыBunkering Check List: Yacht InformationMarian VisanОценок пока нет
- Case Study - Soren ChemicalДокумент3 страницыCase Study - Soren ChemicalSallySakhvadzeОценок пока нет
- 2CG ELTT2 KS TitanMagazine Anazelle-Shan PromoДокумент12 страниц2CG ELTT2 KS TitanMagazine Anazelle-Shan PromoJohn SmithОценок пока нет