Вам также может понравиться
- Bw450/5 Pump: PDF Pdffactory ProДокумент2 страницыBw450/5 Pump: PDF Pdffactory Proamelia100% (1)
- Logics PumpsДокумент155 страницLogics PumpsKashif ChaudhryОценок пока нет
- Submersible+Borehole+Pumps 60+HzДокумент114 страницSubmersible+Borehole+Pumps 60+HzNong Noc100% (1)
- Goulds PumpsДокумент44 страницыGoulds PumpscridavarОценок пока нет
- Design of Solar Water Pumping System in Urban Residential BuildingДокумент5 страницDesign of Solar Water Pumping System in Urban Residential BuildingWilmer BenavidesОценок пока нет
- Engine Lubricating Oil System: Design Iv Machinery System Department of Marine EngineeringДокумент22 страницыEngine Lubricating Oil System: Design Iv Machinery System Department of Marine EngineeringRaka Adhwa MaharikaОценок пока нет
- Residential Sprinkler System Design Handbook: A Step-By-Step Introduction To Design and InstallationДокумент7 страницResidential Sprinkler System Design Handbook: A Step-By-Step Introduction To Design and InstallationPedro JonesОценок пока нет
- Comparison of 4 Different Flow Control Methods of PumpsДокумент5 страницComparison of 4 Different Flow Control Methods of PumpsSebastianCicognaОценок пока нет
- Everything You Need to Know About Centrifugal PumpsДокумент27 страницEverything You Need to Know About Centrifugal PumpsNischal LgОценок пока нет
- Calculation and Specification of Engine Lubricating Oil SystemДокумент34 страницыCalculation and Specification of Engine Lubricating Oil SystemM Taufiq Khan100% (1)
- Waste Water Piping and Vent System Sir FhaДокумент40 страницWaste Water Piping and Vent System Sir Fhabradley100% (1)
- Friction Loss On SuctionДокумент2 страницыFriction Loss On SuctionSathish LingamОценок пока нет
- Pump Control With Variable Frequency Drives - Case Study: Hitachi America, Ltd.Документ4 страницыPump Control With Variable Frequency Drives - Case Study: Hitachi America, Ltd.Hitachi America, Ltd., Industrial Components and Equipment DivisionОценок пока нет
- Pressure Reducing ValveДокумент3 страницыPressure Reducing ValveSasa JadrovskiОценок пока нет
- Pump Selection, AJAX 2000Документ33 страницыPump Selection, AJAX 2000Asad Hayat WarraichОценок пока нет
- John Crane Acoplamientos Serie LДокумент8 страницJohn Crane Acoplamientos Serie LBenicio Joaquín Ferrero BrebesОценок пока нет
- Webtec Hydraulic Tester ManualДокумент68 страницWebtec Hydraulic Tester ManualisidoroОценок пока нет
- Trash Rack Rotary AdiyasaДокумент1 страницаTrash Rack Rotary AdiyasaHengki f Sukresno100% (1)
- Tech PDFДокумент3 страницыTech PDFAwais JalaliОценок пока нет
- Multistage Pump - Kirloskar PDFДокумент63 страницыMultistage Pump - Kirloskar PDFpsuvarnasОценок пока нет
- Fluid Power Formulas GuideДокумент6 страницFluid Power Formulas GuideSunil SahooОценок пока нет
- Lec 08, Hydraulic Grade Line (HGL) and EnergyДокумент8 страницLec 08, Hydraulic Grade Line (HGL) and EnergyMahar Mamoon Rasheed100% (1)
- Design of Hydraulic and Pneumatic SystemsДокумент11 страницDesign of Hydraulic and Pneumatic SystemsBoopathi Kalai100% (1)
- Basic Pump SizingДокумент50 страницBasic Pump SizingRizaldiSaputraОценок пока нет
- Forbes Marshall Consultancy specifications for compressed air accessoriesДокумент2 страницыForbes Marshall Consultancy specifications for compressed air accessoriessppatilОценок пока нет
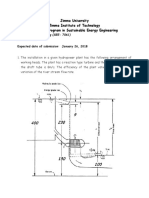
- Jimma University Hydropower Engineering AssignmentДокумент4 страницыJimma University Hydropower Engineering AssignmentAmexTesfayeKoraОценок пока нет
- Yazd-System Description For Clean Drain System PDFДокумент7 страницYazd-System Description For Clean Drain System PDFace-winnieОценок пока нет
- Pump station design recommendations for midrange centrifugal pumpsДокумент8 страницPump station design recommendations for midrange centrifugal pumpsalan toomeyОценок пока нет
- ELMO-F Vacuum Units with Vacuum Pumps, Range 2BE Selection GuideДокумент17 страницELMO-F Vacuum Units with Vacuum Pumps, Range 2BE Selection GuideDSdds0% (1)
- Wilo PumpsДокумент40 страницWilo Pumpsnile_asterОценок пока нет
- HD150 Pump Maintenance ManualДокумент35 страницHD150 Pump Maintenance Manualjacklyn ade putraОценок пока нет
- Heavy Duty Carrier Parts ManualДокумент164 страницыHeavy Duty Carrier Parts ManualRodrigo CruzОценок пока нет
- Data Sheet For Positive Displacement Pumps Reciprocating S 728Dv2020 08Документ10 страницData Sheet For Positive Displacement Pumps Reciprocating S 728Dv2020 08roronoa_zorro11Оценок пока нет
- Centrifugal Pumps: How They Work and Their Performance CurvesДокумент8 страницCentrifugal Pumps: How They Work and Their Performance CurvesSaleem Chohan100% (1)
- Pump selection and head calculation exampleДокумент37 страницPump selection and head calculation exampleIhsan Wiratama100% (1)
- Hydraulic Resevoir Design Criteria PDFДокумент10 страницHydraulic Resevoir Design Criteria PDF2345421Оценок пока нет
- T Pot StrainerДокумент4 страницыT Pot Strainerewanz89Оценок пока нет
- Red Jacket Family BrochureДокумент8 страницRed Jacket Family BrochurekuraimundОценок пока нет
- Fire Pump Relief Valve Model 108FC/108FCA Sizes Features SpecificationsДокумент2 страницыFire Pump Relief Valve Model 108FC/108FCA Sizes Features SpecificationsAdil AzizОценок пока нет
- Impeller DesignДокумент6 страницImpeller Design19MECH052 SYED YOUNUS100% (1)
- Formula Basic Hydraulic Formulas Pressure, Force and Horsepower RelationshipsДокумент5 страницFormula Basic Hydraulic Formulas Pressure, Force and Horsepower Relationshipsshashidhar h vОценок пока нет
- Pump Equations and Formulas CalculatorДокумент11 страницPump Equations and Formulas CalculatorOmar Elhady100% (2)
- The Affinity Laws of Centrifugal PumpsДокумент8 страницThe Affinity Laws of Centrifugal PumpsArunkumar SubramanianОценок пока нет
- Pump Power Calculator PDFДокумент6 страницPump Power Calculator PDFDjalel la ParoleОценок пока нет
- Vertical Sump PumpДокумент6 страницVertical Sump Pumpsahildhingra100% (1)
- MoEF ManualДокумент256 страницMoEF Manualjack jОценок пока нет
- Air Valves ValmaticДокумент28 страницAir Valves Valmaticnimm1962100% (1)
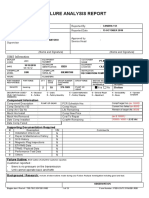
- Failure Analysis Report: SIMS InformationДокумент13 страницFailure Analysis Report: SIMS InformationHasby PotterОценок пока нет
- Kuenz TRCMДокумент9 страницKuenz TRCMklcy1987Оценок пока нет
- Wsfu Storey BuildingДокумент2 страницыWsfu Storey BuildingfebousОценок пока нет
- Pipe WorkДокумент12 страницPipe WorkSudheepОценок пока нет
- FORMULAS FOR PREDICTING VGF-GL/GLD/GSID BHP and Intake Manifold PressureДокумент19 страницFORMULAS FOR PREDICTING VGF-GL/GLD/GSID BHP and Intake Manifold PressureClemente Rafael Marval Escalona100% (1)
- Lecture 5 Irrigation Engineeing IIДокумент26 страницLecture 5 Irrigation Engineeing IIOmar IsaackОценок пока нет
- Report of Pump StationДокумент45 страницReport of Pump StationXolelwa Gasela100% (1)
- Designing Efficient Sewage Pumping SystemsДокумент10 страницDesigning Efficient Sewage Pumping SystemsPriyanka Rupasinghe67% (3)
- Sump DesignДокумент4 страницыSump DesignThiru AnanthОценок пока нет
- PlumbingДокумент62 страницыPlumbingyildyusuf100% (2)
- TAILIN ThickenerДокумент0 страницTAILIN ThickenerAlejandra Vega AvilezОценок пока нет
- AttachmentДокумент31 страницаAttachmenttedy yidegОценок пока нет
- Dry Well PSДокумент7 страницDry Well PSprajmenОценок пока нет
- DN 600m Amirabad 3Документ5 страницDN 600m Amirabad 3anirbanpwd76Оценок пока нет
- Chemical Hazards at Construction SitesДокумент1 страницаChemical Hazards at Construction Sitesanirbanpwd76Оценок пока нет
- Fir Format For KapsitДокумент15 страницFir Format For Kapsitanirbanpwd76Оценок пока нет
- 1118mm - Thickness Calculator For MS or DI PipesДокумент8 страниц1118mm - Thickness Calculator For MS or DI Pipesanirbanpwd76Оценок пока нет
- Seismic Analysis 2Документ6 страницSeismic Analysis 2anirbanpwd76Оценок пока нет
- Img 20210502 0001Документ4 страницыImg 20210502 0001anirbanpwd76Оценок пока нет
- Design of Reinforced Concrete FoundationsДокумент16 страницDesign of Reinforced Concrete Foundationsanirbanpwd76Оценок пока нет
- 1118mm - Thickness Calculator For MS or DI PipesДокумент8 страниц1118mm - Thickness Calculator For MS or DI Pipesanirbanpwd76Оценок пока нет
- Design of Shear Reinforcement in RCC Structures: Intended Learning Outcomes (ILO)Документ16 страницDesign of Shear Reinforcement in RCC Structures: Intended Learning Outcomes (ILO)anirbanpwd76Оценок пока нет
- Chapter 2 - Shear Design SP 17-09-07Документ37 страницChapter 2 - Shear Design SP 17-09-07Alex FerrariОценок пока нет
- 1118mm - Thickness Calculator For MS or DI PipesДокумент8 страниц1118mm - Thickness Calculator For MS or DI Pipesanirbanpwd76Оценок пока нет
- Seismic Analysis 2Документ6 страницSeismic Analysis 2anirbanpwd76Оценок пока нет
- Designof DomesДокумент33 страницыDesignof DomesMukesh KumarОценок пока нет
- Seismic Analysis 200 CumДокумент6 страницSeismic Analysis 200 Cumanirbanpwd76Оценок пока нет
- Seismic Analysis 2Документ6 страницSeismic Analysis 2anirbanpwd76Оценок пока нет
- Design Requirements - IIДокумент1 страницаDesign Requirements - IIanirbanpwd76Оценок пока нет
- Seismic Analysis 200 CumДокумент6 страницSeismic Analysis 200 Cumanirbanpwd76Оценок пока нет
- r1 CPP Estimate July 2019Документ4 страницыr1 CPP Estimate July 2019anirbanpwd76Оценок пока нет
- TectonicsДокумент1 страницаTectonicsanirbanpwd76Оценок пока нет
- Erroneous ATM withdrawal - Rs. 300 missing from Rs. 1500 transactionДокумент1 страницаErroneous ATM withdrawal - Rs. 300 missing from Rs. 1500 transactionanirbanpwd76Оценок пока нет
- Unified Schedule of Rates Iw DeptДокумент96 страницUnified Schedule of Rates Iw Deptanirbanpwd76Оценок пока нет
- Seismic AnalysisДокумент6 страницSeismic Analysisanirbanpwd76Оценок пока нет
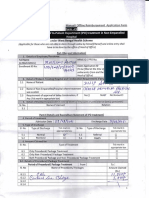
- Submission of Asset Statement to West Bengal GovernmentДокумент1 страницаSubmission of Asset Statement to West Bengal Governmentanirbanpwd76Оценок пока нет
- Design Requirements - IIДокумент1 страницаDesign Requirements - IIanirbanpwd76Оценок пока нет
- Technical Data Pertaining To Source For Clearance by State Level Scheme Sanctioning CommitteeДокумент3 страницыTechnical Data Pertaining To Source For Clearance by State Level Scheme Sanctioning Committeeanirbanpwd76Оценок пока нет
- MedicalДокумент1 страницаMedicalanirbanpwd76Оценок пока нет
- Tectonics 2Документ1 страницаTectonics 2anirbanpwd76Оценок пока нет
- Flow Area CalcДокумент4 страницыFlow Area Calcanirbanpwd76Оценок пока нет
- Dimensional AnalysisДокумент1 страницаDimensional Analysisanirbanpwd76Оценок пока нет
- WTP DetailsДокумент2 страницыWTP Detailsanirbanpwd76Оценок пока нет