Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Tamu Iws 1982Документ461 страницаTamu Iws 1982davih007Оценок пока нет
- Wiley - Transients in Power Systems (2001) Lou Van Der Sluis PDFДокумент221 страницаWiley - Transients in Power Systems (2001) Lou Van Der Sluis PDFMahdi Amini100% (3)
- Parallel Operation of Alternators FundamentalsДокумент12 страницParallel Operation of Alternators FundamentalsSharad ChouguleОценок пока нет
- Transportation and Construction Vibration Guidance ManualДокумент190 страницTransportation and Construction Vibration Guidance ManualAhmad Waal100% (1)
- Oscillations And Waves ExplainedДокумент48 страницOscillations And Waves ExplainedTrilok AkhaniОценок пока нет
- Ccip 016 - 1Документ84 страницыCcip 016 - 1Mac100% (1)
- Python For PhysicsДокумент196 страницPython For PhysicsRosieОценок пока нет
- LANDAU BreakthroughДокумент12 страницLANDAU BreakthroughJoão CunhaОценок пока нет
- 2010 Morley SpacePy A Python Based Lib of Tools For The Space SciencesДокумент7 страниц2010 Morley SpacePy A Python Based Lib of Tools For The Space SciencesJoão CunhaОценок пока нет
- PhysRevB 62 R4790Документ4 страницыPhysRevB 62 R4790João CunhaОценок пока нет
- CH 2 Contact Mechanics 2Документ17 страницCH 2 Contact Mechanics 2Alexander BennettОценок пока нет
- Trainee Promotes HEPTech Node Tech to European IndustryДокумент1 страницаTrainee Promotes HEPTech Node Tech to European IndustryJoão CunhaОценок пока нет
- Utouch CHI2013Документ4 страницыUtouch CHI2013João CunhaОценок пока нет
- Trig WikiДокумент21 страницаTrig WikiJoão CunhaОценок пока нет
- Trig WikiДокумент21 страницаTrig WikiJoão CunhaОценок пока нет
- Perez-Ineichen 1992 - Dynamic Global-To-direct Irradiance Conversion Model (Ashrae)Документ16 страницPerez-Ineichen 1992 - Dynamic Global-To-direct Irradiance Conversion Model (Ashrae)João CunhaОценок пока нет
- An Energy Harvesting Circuit For Self-Powered SensorsДокумент5 страницAn Energy Harvesting Circuit For Self-Powered SensorsJoão CunhaОценок пока нет
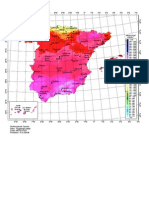
- Media Anual KWH/M : Bilbao Santander León Gijón La Coruña Santiago de Compostela VigoДокумент1 страницаMedia Anual KWH/M : Bilbao Santander León Gijón La Coruña Santiago de Compostela VigoJoão CunhaОценок пока нет
- Eigenvalues EigenvectorsДокумент15 страницEigenvalues EigenvectorsJoão CunhaОценок пока нет
- 1 - Optimu M Solar Flat-Plate Collector Slope Case Study For Helwan Cairo EgyptДокумент14 страниц1 - Optimu M Solar Flat-Plate Collector Slope Case Study For Helwan Cairo EgyptJoão CunhaОценок пока нет
- Pspice TutorialДокумент71 страницаPspice TutorialMarce CampanelliОценок пока нет
- Eigenvalues EigenvectorsДокумент15 страницEigenvalues EigenvectorsJoão CunhaОценок пока нет
- Overview of Rogoski Sensing TechnologyДокумент13 страницOverview of Rogoski Sensing Technologybbsabuya1955Оценок пока нет
- 6MW Wind Turbine Control Design AnalysisДокумент8 страниц6MW Wind Turbine Control Design Analysisoat_sohoОценок пока нет
- Tsokos Teacher's Note Topic C New SyllabusДокумент34 страницыTsokos Teacher's Note Topic C New Syllabusmkedawat09Оценок пока нет
- Airframe Structural Design (Asd)Документ10 страницAirframe Structural Design (Asd)Salim Omer Bamukra Al-MashjariОценок пока нет
- IB Physics IA Ideas Investigations - IdeasДокумент1 страницаIB Physics IA Ideas Investigations - IdeasjohnОценок пока нет
- Oscillation Notes Neet - PDF 44Документ13 страницOscillation Notes Neet - PDF 44merrythomas873Оценок пока нет
- Physics Paper 3 TZ1 HLДокумент36 страницPhysics Paper 3 TZ1 HLd bОценок пока нет
- WAVES FORM 5the diagram, identify the followingДокумент52 страницыWAVES FORM 5the diagram, identify the followingHuda IdrisОценок пока нет
- Phy 1231 SolutionДокумент73 страницыPhy 1231 Solutionhusnerh musaОценок пока нет
- BTEC HNC - Electrical and Electronic Principles - Investigate Transients in RLC CircuitsДокумент20 страницBTEC HNC - Electrical and Electronic Principles - Investigate Transients in RLC CircuitsBrendan BurrОценок пока нет
- Stera 3d Manual v.3.3Документ42 страницыStera 3d Manual v.3.3constantine2008Оценок пока нет
- Aeronautical Engineering V Semester Scheme and SyllabusДокумент41 страницаAeronautical Engineering V Semester Scheme and SyllabusshivurbОценок пока нет
- Assignment 2 - Damped VibrationДокумент1 страницаAssignment 2 - Damped VibrationDr. Pradeep Kumar SharmaОценок пока нет
- Mee5206 Chapter 3Документ62 страницыMee5206 Chapter 3Lim AndrewОценок пока нет
- 2020 2024 ECE SyllabusДокумент211 страниц2020 2024 ECE SyllabusG Ravi Kiran HSCОценок пока нет
- Release Notes Csi Bridge 2016 V 1820Документ16 страницRelease Notes Csi Bridge 2016 V 1820Ihab El AghouryОценок пока нет
- 0505swan A Practical Review of Rotating Machinery Critical Speeds and ModesДокумент8 страниц0505swan A Practical Review of Rotating Machinery Critical Speeds and ModestrebeardОценок пока нет
- Pendulum Lab Report 3 (Final Rough Copy 1)Документ15 страницPendulum Lab Report 3 (Final Rough Copy 1)joe zouОценок пока нет
- 4 Oscillations and WavesДокумент4 страницы4 Oscillations and WavesVincent VetterОценок пока нет
- 1 s2.0 S2352710218307782 MainДокумент11 страниц1 s2.0 S2352710218307782 MainG MdОценок пока нет
- Section Study Guide: Teacher Notes and AnswersДокумент5 страницSection Study Guide: Teacher Notes and AnswerszahraОценок пока нет
- Ir Spectroscopy 2021 SkoogДокумент48 страницIr Spectroscopy 2021 SkoogAlan MathewОценок пока нет
- Oscillations A2Документ28 страницOscillations A2Ali MohamedОценок пока нет