Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- JH Ckcwyky Fujkiqjs in HK'R Ds Dvks K I D DH Okf"Kzd Ys (KK Iphz O"KzДокумент2 страницыJH Ckcwyky Fujkiqjs in HK'R Ds Dvks K I D DH Okf"Kzd Ys (KK Iphz O"KzRaj MikeОценок пока нет
- A Modified Pso Based Solution Approach For Economic Load Dispatch Problem in Power SystemДокумент63 страницыA Modified Pso Based Solution Approach For Economic Load Dispatch Problem in Power SystemRaj Mike100% (1)
- Guided By:-Head of Department: - Presented ByДокумент63 страницыGuided By:-Head of Department: - Presented ByRaj MikeОценок пока нет
- Load Balancing in Cloud ComputingДокумент35 страницLoad Balancing in Cloud ComputingRaj MikeОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- EPAS 11 - Q1 - W1 - Mod1Документ45 страницEPAS 11 - Q1 - W1 - Mod1Alberto A. FugenОценок пока нет
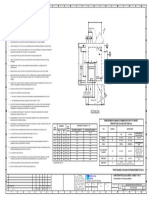
- Notes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0MДокумент1 страницаNotes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0Mسجى وليدОценок пока нет
- Out PDFДокумент211 страницOut PDFAbraham RojasОценок пока нет
- Test 51Документ7 страницTest 51Nguyễn Hiền Giang AnhОценок пока нет
- Skills Checklist - Gastrostomy Tube FeedingДокумент2 страницыSkills Checklist - Gastrostomy Tube Feedingpunam todkar100% (1)
- LM2576/LM2576HV Series Simple Switcher 3A Step-Down Voltage RegulatorДокумент21 страницаLM2576/LM2576HV Series Simple Switcher 3A Step-Down Voltage RegulatorcgmannerheimОценок пока нет
- Hidrl1 PDFДокумент7 страницHidrl1 PDFRajesh Kumar100% (1)
- Assignment of Chemistry For B.sc-B.ed First Semester Session 2019-2023-1Документ2 страницыAssignment of Chemistry For B.sc-B.ed First Semester Session 2019-2023-1Payal sahaОценок пока нет
- Catify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Документ315 страницCatify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Paz Libros100% (2)
- Canoe Matlab 001Документ58 страницCanoe Matlab 001Coolboy RoadsterОценок пока нет
- Microsmart GEODTU Eng 7Документ335 страницMicrosmart GEODTU Eng 7Jim JonesjrОценок пока нет
- Design of Combinational Circuit For Code ConversionДокумент5 страницDesign of Combinational Circuit For Code ConversionMani BharathiОценок пока нет
- Topic 3Документ21 страницаTopic 3Ivan SimonОценок пока нет
- Application Form InnofundДокумент13 страницApplication Form InnofundharavinthanОценок пока нет
- Apple Change ManagementДокумент31 страницаApple Change ManagementimuffysОценок пока нет
- Patrick Meyer Reliability Understanding Statistics 2010Документ160 страницPatrick Meyer Reliability Understanding Statistics 2010jcgueinj100% (1)
- Algoritm BackTracking EnglezaДокумент6 страницAlgoritm BackTracking Englezaionutz_67Оценок пока нет
- Wholesale Terminal Markets - Relocation and RedevelopmentДокумент30 страницWholesale Terminal Markets - Relocation and RedevelopmentNeha Bhusri100% (1)
- Jackson V AEGLive - May 10 Transcripts, of Karen Faye-Michael Jackson - Make-up/HairДокумент65 страницJackson V AEGLive - May 10 Transcripts, of Karen Faye-Michael Jackson - Make-up/HairTeamMichael100% (2)
- ChatGpt PDFДокумент19 страницChatGpt PDFsanx2014100% (1)
- Gas Dynamics and Jet Propulsion 2marksДокумент15 страницGas Dynamics and Jet Propulsion 2marksAbdul rahumanОценок пока нет
- Meno's Paradox of Inquiry and Socrates' Theory of RecollectionДокумент10 страницMeno's Paradox of Inquiry and Socrates' Theory of RecollectionPhilip DarbyОценок пока нет
- Lieh TzuДокумент203 страницыLieh TzuBrent Cullen100% (2)
- Chapter 23Документ9 страницChapter 23Javier Chuchullo TitoОценок пока нет
- Tool Charts PDFДокумент3 страницыTool Charts PDFtebengz100% (2)
- Cooperative Learning: Complied By: ANGELICA T. ORDINEZAДокумент16 страницCooperative Learning: Complied By: ANGELICA T. ORDINEZAAlexis Kaye GullaОценок пока нет
- UntitledДокумент216 страницUntitledMONICA SIERRA VICENTEОценок пока нет
- Drug Addiction Final (Term Paper)Документ15 страницDrug Addiction Final (Term Paper)Dessa Patiga IIОценок пока нет
- postedcontentadminuploadsFAQs20for20Organization PDFДокумент10 страницpostedcontentadminuploadsFAQs20for20Organization PDFMohd Adil AliОценок пока нет
- Chapter 13 (Automatic Transmission)Документ26 страницChapter 13 (Automatic Transmission)ZIBA KHADIBIОценок пока нет