Вам также может понравиться
- 1º Manual Retroescavadeira 416E Julho 2007Документ938 страниц1º Manual Retroescavadeira 416E Julho 2007Rafael Milan100% (24)
- Janela Da Alma - Antonio Carreiro.Документ325 страницJanela Da Alma - Antonio Carreiro.RenataSantos100% (8)
- Decodifição Da BHS Critica Textual Do PentateucoДокумент8 страницDecodifição Da BHS Critica Textual Do PentateucoAndré Costa0% (1)
- O desmioladoДокумент132 страницыO desmioladoCelso100% (1)
- A Sinagoga de Satanás - A Linhagem Dos RothschildДокумент43 страницыA Sinagoga de Satanás - A Linhagem Dos Rothschildgoldtrade86% (43)
- Teses 5 Congresso PT FinalДокумент165 страницTeses 5 Congresso PT FinalAugustoCesarRibeiroVieiraОценок пока нет
- Manual de Critica TextualДокумент69 страницManual de Critica TextualAndré CostaОценок пока нет
- Colas e Colagem PDFДокумент14 страницColas e Colagem PDFLásaro Lima100% (1)
- MW Ebook AcoesДокумент51 страницаMW Ebook AcoesAndré CostaОценок пока нет
- Estudos Da Critica Textual Do Novo TestamentoДокумент98 страницEstudos Da Critica Textual Do Novo TestamentoAndré Costa100% (1)
- A Religião ProibidaДокумент62 страницыA Religião ProibidaRobert Shankar100% (3)
- Ímã e suas propriedades: atração de ferro e campo magnéticoДокумент59 страницÍmã e suas propriedades: atração de ferro e campo magnéticoHyagoTayaОценок пока нет
- Condicionantes de vida e escolhasДокумент3 страницыCondicionantes de vida e escolhasBetânia CoelhoОценок пока нет
- Apostila Siemens CNCДокумент507 страницApostila Siemens CNClipedalan83% (6)
- SE205Документ73 страницыSE205g30.mirandaОценок пока нет
- HermenêuticaДокумент17 страницHermenêuticaAndré CostaОценок пока нет
- Controle LED Botão ArduinoДокумент7 страницControle LED Botão ArduinoGabriel GustavoОценок пока нет
- NF-162669 The ButtonДокумент1 страницаNF-162669 The ButtonAndré CostaОценок пока нет
- Modulacao AM-DSB-SC PDFДокумент15 страницModulacao AM-DSB-SC PDFBreno Oliveira UTОценок пока нет
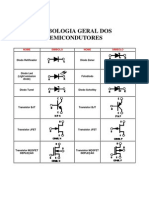
- Simbologia Geral Dos Semicondutores Páginas 1 2Документ2 страницыSimbologia Geral Dos Semicondutores Páginas 1 2André CostaОценок пока нет
- Simbologia Geral Dos Semicondutores Páginas 1 2Документ2 страницыSimbologia Geral Dos Semicondutores Páginas 1 2André CostaОценок пока нет
- Simbolos SemicondutoresДокумент9 страницSimbolos SemicondutoresFábio RibeiroОценок пока нет
- Projeto Integrador - Nervo Teste - 2018-2Документ6 страницProjeto Integrador - Nervo Teste - 2018-2André CostaОценок пока нет
- Modulacao AM-DSB-SC PDFДокумент15 страницModulacao AM-DSB-SC PDFBreno Oliveira UTОценок пока нет
- NF-162669 The ButtonДокумент1 страницаNF-162669 The ButtonAndré CostaОценок пока нет
- 1 INTRODUCaOДокумент4 страницы1 INTRODUCaOAndré CostaОценок пока нет
- (E-BOOK) Guia - Automação Residencial e Construtoras - WOWДокумент26 страниц(E-BOOK) Guia - Automação Residencial e Construtoras - WOWAndré CostaОценок пока нет
- Apostila+A Udio+e+acu SticaДокумент71 страницаApostila+A Udio+e+acu SticaAndré CostaОценок пока нет
- O Seculo II e o Canone Do Novo TestamentoДокумент22 страницыO Seculo II e o Canone Do Novo TestamentoAndré CostaОценок пока нет
- Como montar uma loja de animaisДокумент32 страницыComo montar uma loja de animaisSérgio PereiraОценок пока нет
- Biografia de Luigi Francescon Um Dos Pioneiros Do Pentecostalismo No Brasil 1 PDFДокумент74 страницыBiografia de Luigi Francescon Um Dos Pioneiros Do Pentecostalismo No Brasil 1 PDFDaniel Siqueira BarãoОценок пока нет
- Apostila de DevДокумент74 страницыApostila de DevWeliton V. BorgesОценок пока нет
- Como montar uma loja de animaisДокумент32 страницыComo montar uma loja de animaisSérgio PereiraОценок пока нет
- Impedância: conceito, símbolo e aplicações em circuitos ACДокумент36 страницImpedância: conceito, símbolo e aplicações em circuitos ACJwaibal SilОценок пока нет
- Acidentes Causados Durante A Movimentação de CargasДокумент26 страницAcidentes Causados Durante A Movimentação de CargasAntonio Fernando Navarro100% (1)
- Manual Avatar Cuatro TUS 0904 R04Документ48 страницManual Avatar Cuatro TUS 0904 R04Clemente Mota Souza CostaОценок пока нет
- Os calções verdes do BrunoДокумент3 страницыOs calções verdes do BrunoAlbina DinisОценок пока нет
- A incomensurabilidade e a racionalidade da ciênciaДокумент15 страницA incomensurabilidade e a racionalidade da ciênciaGian LuccaОценок пока нет
- Instalação ventilador teto 2,30m manual instruçõesДокумент2 страницыInstalação ventilador teto 2,30m manual instruçõesNarciso Silva100% (1)
- Universidade ZambezeДокумент19 страницUniversidade ZambezeSérgio FabiaoОценок пока нет
- Dados técnicos motor elétrico WEGДокумент4 страницыDados técnicos motor elétrico WEGAnderson MancianoОценок пока нет
- Tradução Interlingual - Análise Dos Procedimentos Técnicos de Tradução de Língua Portuguesa para Libras Do CD Rom As Aventuras de PinóquioДокумент7 страницTradução Interlingual - Análise Dos Procedimentos Técnicos de Tradução de Língua Portuguesa para Libras Do CD Rom As Aventuras de PinóquioDayane SoaresОценок пока нет
- Car Aula 2Документ34 страницыCar Aula 2claudioОценок пока нет
- Aula11 QuiquadradoA12012 PDFДокумент32 страницыAula11 QuiquadradoA12012 PDFRodrigo CarvalhoОценок пока нет
- Relatório prática lei OhmДокумент4 страницыRelatório prática lei OhmWillian LimaОценок пока нет
- Química Inorgânica Funções InorgânicasДокумент15 страницQuímica Inorgânica Funções Inorgânicascb_penatrujilloОценок пока нет
- Grandezas ElétricasДокумент11 страницGrandezas Elétricasbruno_teruoОценок пока нет
- Comunicação interna na EPAMIGДокумент134 страницыComunicação interna na EPAMIGjonatasОценок пока нет
- Física I - Exercícios de vetores e grandezas físicasДокумент4 страницыFísica I - Exercícios de vetores e grandezas físicasBárbara PintoОценок пока нет
- Geometria Analítica EspaçoДокумент15 страницGeometria Analítica EspaçoAfonso MachadoОценок пока нет
- Atividade 2 - Mat - Cálculo Diferencial e Integral I - 54-2023Документ8 страницAtividade 2 - Mat - Cálculo Diferencial e Integral I - 54-2023Cavalini Assessoria Acadêmica0% (1)
- Definição e propriedades da NeográficaДокумент12 страницDefinição e propriedades da NeográficaDaniel LealОценок пока нет
- Arteche Mu CA-ut-ka PTДокумент22 страницыArteche Mu CA-ut-ka PTMárcio JuniorОценок пока нет
- Monitoramento Ruído EmpresaДокумент11 страницMonitoramento Ruído EmpresaPaberinniОценок пока нет
- O papel da tradição na formação do ethos segundo a fenomenologiaДокумент15 страницO papel da tradição na formação do ethos segundo a fenomenologiamierjamОценок пока нет
- Origem da Homoquiralidade e a VidaДокумент10 страницOrigem da Homoquiralidade e a VidaRicardo BlondetОценок пока нет