Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Contribution of Obesity and Abdominal Fat Mass To Risk of Stroke and TransientДокумент8 страницContribution of Obesity and Abdominal Fat Mass To Risk of Stroke and TransientLubna AmrОценок пока нет
- Bachelor Project PowerpointДокумент26 страницBachelor Project PowerpointLubna AmrОценок пока нет
- A Nonparametric Test For Symmetry Using RSS PDFДокумент19 страницA Nonparametric Test For Symmetry Using RSS PDFLubna AmrОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- WHO's Drinking Water Standards 1993Документ1 страницаWHO's Drinking Water Standards 1993Lubna Amr100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Koti and Pau PDFДокумент14 страницKoti and Pau PDFLubna AmrОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Question 1 Matlab CodeДокумент3 страницыQuestion 1 Matlab CodeLubna AmrОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- APA Citation StyleДокумент13 страницAPA Citation StyleCamille FernandezОценок пока нет
- Q2) Gaussian Elimination: FunctionДокумент3 страницыQ2) Gaussian Elimination: FunctionLubna AmrОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Minitab f1&2Документ42 страницыMinitab f1&2Lubna AmrОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Ecoflam Burners 2014 enДокумент60 страницEcoflam Burners 2014 enanonimppОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- University of Cambridge International Examinations General Certificate of Education Advanced LevelДокумент4 страницыUniversity of Cambridge International Examinations General Certificate of Education Advanced LevelHubbak KhanОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Factors That Affect College Students' Attitudes Toward MathematicsДокумент17 страницFactors That Affect College Students' Attitudes Toward MathematicsAnthony BernardinoОценок пока нет
- Class VI (Second Term)Документ29 страницClass VI (Second Term)Yogesh BansalОценок пока нет
- Disc Brake System ReportДокумент20 страницDisc Brake System ReportGovindaram Rajesh100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- 1.project FullДокумент75 страниц1.project FullKolliparaDeepakОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Microprocessor I - Lecture 01Документ27 страницMicroprocessor I - Lecture 01Omar Mohamed Farag Abd El FattahОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Chap005 3Документ26 страницChap005 3Anass BОценок пока нет
- Epson WorkForce Pro WF-C878-879RДокумент8 страницEpson WorkForce Pro WF-C878-879Rsales2 HARMONYSISTEMОценок пока нет
- Serie W11 PDFДокумент2 страницыSerie W11 PDFOrlandoОценок пока нет
- Thermal Breakthrough Calculations To Optimize Design of Amultiple-Stage EGS 2015-10Документ11 страницThermal Breakthrough Calculations To Optimize Design of Amultiple-Stage EGS 2015-10orso brunoОценок пока нет
- Synthesis of Glycerol Monooctadecanoate From Octadecanoic Acid and Glycerol. Influence of Solvent On The Catalytic Properties of Basic OxidesДокумент6 страницSynthesis of Glycerol Monooctadecanoate From Octadecanoic Acid and Glycerol. Influence of Solvent On The Catalytic Properties of Basic OxidesAnonymous yNMZplPbVОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Famous MathematicianДокумент116 страницFamous MathematicianAngelyn MontibolaОценок пока нет
- 21 API Functions PDFДокумент14 страниц21 API Functions PDFjet_mediaОценок пока нет
- Grade-9 (3rd)Документ57 страницGrade-9 (3rd)Jen Ina Lora-Velasco GacutanОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Chapter 1 IntroductionДокумент49 страницChapter 1 IntroductionGemex4fshОценок пока нет
- Lab 3.1 - Configuring and Verifying Standard ACLsДокумент9 страницLab 3.1 - Configuring and Verifying Standard ACLsRas Abel BekeleОценок пока нет
- TitleДокумент142 страницыTitleAmar PašićОценок пока нет
- Biztalk and Oracle IntegrationДокумент2 страницыBiztalk and Oracle IntegrationkaushiksinОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Sample Chapter - Oil and Gas Well Drilling Technology PDFДокумент19 страницSample Chapter - Oil and Gas Well Drilling Technology PDFDavid John100% (1)
- PRD Doc Pro 3201-00001 Sen Ain V31Документ10 страницPRD Doc Pro 3201-00001 Sen Ain V31rudybestyjОценок пока нет
- The Number MysteriesДокумент3 страницыThe Number Mysterieskothari080903Оценок пока нет
- HANA OverviewДокумент69 страницHANA OverviewSelva KumarОценок пока нет
- Student - The Passive Voice Without AnswersДокумент5 страницStudent - The Passive Voice Without AnswersMichelleОценок пока нет
- OK Flux 231 (F7AZ-EL12) PDFДокумент2 страницыOK Flux 231 (F7AZ-EL12) PDFborovniskiОценок пока нет
- 003pcu3001 Baja California - JMH - v4 PDFДокумент15 страниц003pcu3001 Baja California - JMH - v4 PDFEmir RubliovОценок пока нет
- DocuДокумент77 страницDocuDon'tAsK TheStupidOnesОценок пока нет
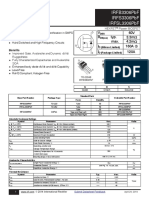
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120AДокумент12 страницIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligОценок пока нет
- Workshop 2 Electrical Installations Single PhaseДокумент3 страницыWorkshop 2 Electrical Installations Single PhaseDIAN NUR AIN BINTI ABD RAHIM A20MJ0019Оценок пока нет