Вам также может понравиться
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- IEC61000-4-2 ESD Generator SPICE ModelДокумент5 страницIEC61000-4-2 ESD Generator SPICE ModelteomondoОценок пока нет
- AC Rectifier Bulk Capacitor Selection With Analysis+SPICE (Walker) PDFДокумент5 страницAC Rectifier Bulk Capacitor Selection With Analysis+SPICE (Walker) PDFjazbo8Оценок пока нет
- Conducted EMI Simulation of Switched Mode PDFДокумент6 страницConducted EMI Simulation of Switched Mode PDFPrabhu KumaraswamyОценок пока нет
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- GTO RectifierДокумент13 страницGTO RectifierBijay PoudelОценок пока нет
- Z TransformsДокумент25 страницZ TransformsSujesh ShettyОценок пока нет
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachОт EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachОценок пока нет
- Study of Model Predictive Control Using Ni LabviewДокумент10 страницStudy of Model Predictive Control Using Ni LabviewBrankko Jhonathan Torres SaavedraОценок пока нет
- Beamer - How To Customise The Header of A Frankfurt Slide?: 2 AnswersДокумент6 страницBeamer - How To Customise The Header of A Frankfurt Slide?: 2 Answersalanpicard2303Оценок пока нет
- Top-Down Digital VLSI Design: From Architectures to Gate-Level Circuits and FPGAsОт EverandTop-Down Digital VLSI Design: From Architectures to Gate-Level Circuits and FPGAsОценок пока нет
- Driving Relays With stm32f407vgtx Microcontroller Using Uln2003 Relay DriverДокумент12 страницDriving Relays With stm32f407vgtx Microcontroller Using Uln2003 Relay DriverAnonymous Nlaa5HОценок пока нет
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsОт EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsОценок пока нет
- Transient AnalysisДокумент16 страницTransient Analysisdr_biltОценок пока нет
- Switch Mode Power Conversion Fundamentals and Power Converters for PV SystemsДокумент45 страницSwitch Mode Power Conversion Fundamentals and Power Converters for PV SystemsRoberto Castillo MirandaОценок пока нет
- Digital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsОт EverandDigital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsОценок пока нет
- Evaluation of The Transient Response of A DC MotorДокумент6 страницEvaluation of The Transient Response of A DC MotorNesuh MalangОценок пока нет
- Transistorized Series Voltage RegulatorДокумент4 страницыTransistorized Series Voltage RegulatorIpsita MishraОценок пока нет
- 16 IIR Filter DesignДокумент23 страницы16 IIR Filter DesignManisman ParidaОценок пока нет
- Electrical Machinery by Dr. P S BimbhraДокумент339 страницElectrical Machinery by Dr. P S BimbhraNikhilОценок пока нет
- Slyb 174 BДокумент152 страницыSlyb 174 BAdi PopaОценок пока нет
- HP ProBook 450 G4 Quanta X63 DA0X83MB6H1 REV H SchematicsДокумент67 страницHP ProBook 450 G4 Quanta X63 DA0X83MB6H1 REV H Schematicsedwar cardenasОценок пока нет
- Matrix Converter ThesisДокумент148 страницMatrix Converter ThesisHollie Rosa100% (1)
- Electrotek Concepts - Harmonic StudiesДокумент4 страницыElectrotek Concepts - Harmonic StudiesHarikrishna MudaОценок пока нет
- CH.4 Full-wave and Three-phase Rectifiers for AC to DC ConversionДокумент55 страницCH.4 Full-wave and Three-phase Rectifiers for AC to DC ConversionImran AbdullahОценок пока нет
- Articol - Dewan - Rectifier Filter Design PDFДокумент7 страницArticol - Dewan - Rectifier Filter Design PDFCovaci BogdanОценок пока нет
- Digital Control Tutorial: Designing Digital Systems from Continuous ModelsДокумент12 страницDigital Control Tutorial: Designing Digital Systems from Continuous ModelsDan AnghelОценок пока нет
- DSP Basics ManualДокумент70 страницDSP Basics ManualpavithraОценок пока нет
- Modeling and Simulation of Reluctance Motor Using Digital ComputerДокумент5 страницModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatОценок пока нет
- Introduction To DSPДокумент59 страницIntroduction To DSPSiony BelloОценок пока нет
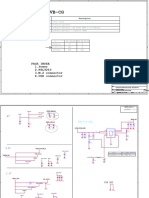
- RTL9210-VB-CG Demo V203 PDFДокумент5 страницRTL9210-VB-CG Demo V203 PDFCenusa MihaiОценок пока нет
- Pspice Lab ManualДокумент30 страницPspice Lab ManualSrinivasarao ThumatiОценок пока нет
- A REVIEW ON LDO PASS ELEMENTSДокумент5 страницA REVIEW ON LDO PASS ELEMENTSChristina ReyesОценок пока нет
- Power Devices and IGBT CharacteristicsДокумент38 страницPower Devices and IGBT CharacteristicsKien Trung50% (2)
- PMAC Whitepaper PDFДокумент15 страницPMAC Whitepaper PDFIFeLisTigrisОценок пока нет
- DC-DC Switching Boost ConverterДокумент16 страницDC-DC Switching Boost ConverterRaden Mas AgoenkОценок пока нет
- Lab6 Phase Locked LoopsДокумент20 страницLab6 Phase Locked Loopsuitce2011Оценок пока нет
- APLab Programmable Multi Output DC Power SupplyДокумент2 страницыAPLab Programmable Multi Output DC Power Supplyanoop116Оценок пока нет
- An Innovative Compact Saturable-Core HTS FCL - Development Testing & Application To Transmission Class NetworksДокумент8 страницAn Innovative Compact Saturable-Core HTS FCL - Development Testing & Application To Transmission Class NetworksIr Harriezan AhmadОценок пока нет
- DTTTДокумент528 страницDTTTMỹ Phước NguyễnОценок пока нет
- Class Ab Output BufferДокумент4 страницыClass Ab Output BufferrivercamОценок пока нет
- Dynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkДокумент6 страницDynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkSuhail Ahmad SuhailОценок пока нет
- Synchronous Machine: Generator MotorДокумент14 страницSynchronous Machine: Generator Motorhafiz_jaaffar100% (1)
- Whitepaper Slot Fill WindingsДокумент7 страницWhitepaper Slot Fill WindingsSnowdenKonanОценок пока нет
- PWM Based DC Motor Speed Control Using MicrocontrollerДокумент8 страницPWM Based DC Motor Speed Control Using MicrocontrollertazebОценок пока нет
- DC Motor Speed Control MethodsДокумент16 страницDC Motor Speed Control MethodsmrsploogeОценок пока нет
- Workshop ON Ltspice: Fabrice WATEAUДокумент60 страницWorkshop ON Ltspice: Fabrice WATEAUkalimbaloОценок пока нет
- Colpitts Oscillator Using Op Amp PDFДокумент2 страницыColpitts Oscillator Using Op Amp PDFStewartОценок пока нет
- Generating 50Hz PWM Using PIC16F877AДокумент2 страницыGenerating 50Hz PWM Using PIC16F877AZarko DacevicОценок пока нет
- Series-parallel DC circuits worksheetДокумент48 страницSeries-parallel DC circuits worksheetbryarОценок пока нет
- Analysis of Power Electronics ConvertesДокумент1 страницаAnalysis of Power Electronics Convertesksurya136Оценок пока нет
- 442 Revised Lab Manual w07Документ51 страница442 Revised Lab Manual w07srinu247Оценок пока нет
- Line Commutated Converters ExplainedДокумент10 страницLine Commutated Converters ExplainedJay Romar PabianiaОценок пока нет
- Modelling of The Three-Phase Induction Motor Using SIMULINKДокумент3 страницыModelling of The Three-Phase Induction Motor Using SIMULINKsajs20175% (4)
- How Will Climate Change Affect The Cairns Region?Документ2 страницыHow Will Climate Change Affect The Cairns Region?kurabyqld100% (1)
- Ucc3941 5Документ20 страницUcc3941 5kurabyqldОценок пока нет
- 0115Документ7 страниц0115kurabyqldОценок пока нет
- Azeez SramlimitsДокумент4 страницыAzeez SramlimitskurabyqldОценок пока нет
- P578Документ1 страницаP578Anonymous 0YEApBuZIОценок пока нет
- Pronouns EnglishДокумент13 страницPronouns EnglishMihai AlexxОценок пока нет
- Low Frequency CapacitorsДокумент3 страницыLow Frequency CapacitorskurabyqldОценок пока нет
- Features Description: Ltc3536 1A Low Noise, Buck-Boost DC/DC ConverterДокумент28 страницFeatures Description: Ltc3536 1A Low Noise, Buck-Boost DC/DC ConverternevdullОценок пока нет
- RHPZ, A Two Way Control PathДокумент11 страницRHPZ, A Two Way Control PathkurabyqldОценок пока нет
- APL 2009 RateequationanalysisДокумент3 страницыAPL 2009 RateequationanalysiskurabyqldОценок пока нет
- 0217Документ1 страница0217kurabyqldОценок пока нет
- 15 Thomsen ISSCC 2000Документ2 страницы15 Thomsen ISSCC 2000kurabyqldОценок пока нет
- Logicworks4 TutorialДокумент10 страницLogicworks4 TutorialAbdullah HasanОценок пока нет
- JAP1998 Nonvolatilememory Ac NitrogendopedДокумент5 страницJAP1998 Nonvolatilememory Ac NitrogendopedkurabyqldОценок пока нет
- NanoMat12 Optional Paper 01bДокумент6 страницNanoMat12 Optional Paper 01bkurabyqldОценок пока нет
- ECE 304: Iterative Design of Feedback Network: SchematicДокумент6 страницECE 304: Iterative Design of Feedback Network: SchematickurabyqldОценок пока нет
- Fully DepletedДокумент4 страницыFully DepletedkurabyqldОценок пока нет
- Apl 2002 Electronic CharacДокумент3 страницыApl 2002 Electronic CharackurabyqldОценок пока нет
- Integrator's Time ConstantsДокумент2 страницыIntegrator's Time ConstantskurabyqldОценок пока нет
- 13.1 A Fully-Integrated Single-Chip SOC For BluetoothДокумент3 страницы13.1 A Fully-Integrated Single-Chip SOC For BluetoothkurabyqldОценок пока нет
- Abstract ISSCC2011 SC2 AbstractДокумент1 страницаAbstract ISSCC2011 SC2 AbstractkurabyqldОценок пока нет
- 30 Bollati JSSC 2001Документ11 страниц30 Bollati JSSC 2001kurabyqldОценок пока нет
- Analysis and Optimization of Accumulation-Mode Varactor For RFДокумент2 страницыAnalysis and Optimization of Accumulation-Mode Varactor For RFkurabyqldОценок пока нет
- 65 Caprio ElecLett 1973Документ2 страницы65 Caprio ElecLett 1973kurabyqldОценок пока нет
- Abstract ISSCC2011 SC1 AbstractДокумент1 страницаAbstract ISSCC2011 SC1 AbstractkurabyqldОценок пока нет
- New F820 Survival Magnesium Flint Fire Steel Starter Start StickДокумент4 страницыNew F820 Survival Magnesium Flint Fire Steel Starter Start StickkurabyqldОценок пока нет
- 2 Kinget CICC 2008Документ6 страниц2 Kinget CICC 2008kurabyqldОценок пока нет
- Transactions Briefs: Improved Switched Tuning of Differential Cmos VcosДокумент4 страницыTransactions Briefs: Improved Switched Tuning of Differential Cmos VcoskurabyqldОценок пока нет
- 709 Op AmpДокумент7 страниц709 Op AmpWuttichai KiamОценок пока нет
- PLCC Lightbar Modules (IP67) - Eng - v2Документ0 страницPLCC Lightbar Modules (IP67) - Eng - v2kurabyqldОценок пока нет
- DBX 586 ManualДокумент16 страницDBX 586 ManualkidlexОценок пока нет
- Slipperman's Recording Distorted Guitars From Hell (Readable Version) PDFДокумент85 страницSlipperman's Recording Distorted Guitars From Hell (Readable Version) PDFKenneth CastilloОценок пока нет
- V-AMP3: User ManualДокумент19 страницV-AMP3: User Manualnutmeg_kickerОценок пока нет
- Audio Sink Application Configuration User GuideДокумент71 страницаAudio Sink Application Configuration User GuideСерхио ДимитриоОценок пока нет
- M61 Guide en-USДокумент2 страницыM61 Guide en-USJuan OlivaОценок пока нет
- Nonlin (Manual)Документ80 страницNonlin (Manual)rojica06Оценок пока нет
- Pedal Phreakery: Vol. 4: Review EditionДокумент32 страницыPedal Phreakery: Vol. 4: Review EditionMDОценок пока нет
- A Quickish Guide To Making Audio Recordings PDFДокумент7 страницA Quickish Guide To Making Audio Recordings PDFapi-624478936Оценок пока нет
- Digital CommunicationДокумент9 страницDigital CommunicationSaraswathi AsirvathamОценок пока нет
- EQ Cheat Sheet FullДокумент15 страницEQ Cheat Sheet Fullvali29100% (5)
- DSPXmini-AM v1.01 ManualДокумент44 страницыDSPXmini-AM v1.01 ManualRaul Angel Perez AbadОценок пока нет
- LspCAD 6 Tutorial PDFДокумент30 страницLspCAD 6 Tutorial PDFPatrik LövströmОценок пока нет
- X32 UserGuideДокумент28 страницX32 UserGuideVolmir de PaulaОценок пока нет
- Big Ceil Suite ManualДокумент9 страницBig Ceil Suite ManualBlogul TendinteОценок пока нет
- User'S Manual: Featuring Software Version 2.2.0Документ49 страницUser'S Manual: Featuring Software Version 2.2.0ahsОценок пока нет
- Harbinger L2404FX USB Mixer ManualДокумент24 страницыHarbinger L2404FX USB Mixer ManualEd C . HernandezОценок пока нет
- Creating Custom Voices on Tyros 2 using Samples (40Документ10 страницCreating Custom Voices on Tyros 2 using Samples (40Ali DkaliОценок пока нет
- Joyo - AC Tone DiscussionДокумент13 страницJoyo - AC Tone DiscussionLorenzo ZuluetaОценок пока нет
- tEXtures Yamaha EX5 - Joel SilverДокумент35 страницtEXtures Yamaha EX5 - Joel SilverjboltnzОценок пока нет
- Management) Chapter Six (Solid Waste Collection of Solid Waste 6.1 Waste CollectionДокумент14 страницManagement) Chapter Six (Solid Waste Collection of Solid Waste 6.1 Waste CollectionDebasish DasОценок пока нет
- 270291-DX26 (Digital Loudspeaker Processor)Документ4 страницы270291-DX26 (Digital Loudspeaker Processor)Olger Quintero TapiaОценок пока нет
- VI One ManualДокумент24 страницыVI One ManualSundarJaisinghОценок пока нет
- Circuit Programmers Reference Guide v1-1 - 0Документ19 страницCircuit Programmers Reference Guide v1-1 - 0Aldo TernavasioОценок пока нет
- BlueTubes EqualizersДокумент18 страницBlueTubes EqualizersrhaumeoОценок пока нет
- Dream Theater - Octavarium in Presence of EnemiesДокумент2 страницыDream Theater - Octavarium in Presence of EnemiesRakurai Dojo-choОценок пока нет
- Mastering Music for Maximum ImpactДокумент20 страницMastering Music for Maximum ImpactRuggine eeОценок пока нет
- Yamaha Stagepas 400BT Portable PA Sy (End 1 - 2 - 2022 12 - 00 AM)Документ7 страницYamaha Stagepas 400BT Portable PA Sy (End 1 - 2 - 2022 12 - 00 AM)kandau85Оценок пока нет
- High-End Car Audio 2005 - Pioneer Tuning - Pioneer EuropeДокумент21 страницаHigh-End Car Audio 2005 - Pioneer Tuning - Pioneer EuropeVICTOR MANUELОценок пока нет
- Marshall MG15CD MG15CDR MG15DFX Users ManualДокумент8 страницMarshall MG15CD MG15CDR MG15DFX Users Manualb0beiii100% (1)
- The Subjective and Objective Evaluation of Room Correction ProductsДокумент30 страницThe Subjective and Objective Evaluation of Room Correction ProductsМаксим НестеренкоОценок пока нет
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionОт EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionРейтинг: 4.5 из 5 звезд4.5/5 (542)
- 8051 Microcontroller: An Applications Based IntroductionОт Everand8051 Microcontroller: An Applications Based IntroductionРейтинг: 5 из 5 звезд5/5 (6)
- Understanding Automotive Electronics: An Engineering PerspectiveОт EverandUnderstanding Automotive Electronics: An Engineering PerspectiveРейтинг: 3.5 из 5 звезд3.5/5 (16)
- Build Your Own Electric Vehicle, Third EditionОт EverandBuild Your Own Electric Vehicle, Third EditionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsОт EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsРейтинг: 4 из 5 звезд4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026От EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Рейтинг: 5 из 5 звезд5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionОт EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionРейтинг: 4 из 5 звезд4/5 (331)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersОт Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersРейтинг: 5 из 5 звезд5/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsОт EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsРейтинг: 5 из 5 звезд5/5 (2)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemОт EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemОценок пока нет
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)От EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Рейтинг: 4.5 из 5 звезд4.5/5 (2)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowОт EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowОценок пока нет
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesОт EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesРейтинг: 5 из 5 звезд5/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesОт EverandThe Rare Metals War: the dark side of clean energy and digital technologiesРейтинг: 5 из 5 звезд5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeОт EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeРейтинг: 5 из 5 звезд5/5 (8)
- Operational Amplifier Circuits: Analysis and DesignОт EverandOperational Amplifier Circuits: Analysis and DesignРейтинг: 4.5 из 5 звезд4.5/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingОт EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingРейтинг: 4 из 5 звезд4/5 (1)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsОт EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsРейтинг: 5 из 5 звезд5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinОт EverandThe Graphene Revolution: The Weird Science of the Ultra-thinРейтинг: 4.5 из 5 звезд4.5/5 (4)