Академический Документы
Профессиональный Документы
Культура Документы
M205 Ud02 02
Загружено:
Snow Gastón GaelОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
M205 Ud02 02
Загружено:
Snow Gastón GaelАвторское право:
Доступные форматы
02
Control Numrico
La mquina C.N.C.
Control Numrico
02
ndice
OBJETIVOS .......................................................................................................... 3 INTRODUCCIN .................................................................................................. 4 2.1. Sistemas de ejes ......................................................................................... 5 2.2. Puntos de orgen y referencias ................................................................ 11 2.2.1. Definiciones y nomenclatura utilizada ................................................. 12 2.3. Proceso de bsqueda de cero pieza ....................................................... 16 2.3.1. Bsqueda de referencia o Ref Point ................................................. 17 2.3.2. Decalaje de origen en torno: la bsqueda del cero pieza ................... 20 2.3.2.1. El concepto de frames programables ........................................... 22 2.3.2.2. Procesos de bsqueda de cero pieza .......................................... 24 2.3.3. Decalaje de origen en fresadora: la bsqueda del cero pieza ........... 31 2.3.3.1. Procesos de bsqueda de cero pieza. ......................................... 32 RESUMEN .......................................................................................................... 43
La mquina C.N.C.
Control Numrico
02
Objetivos
Definir claramente cules son los puntos significativos que posee una mquinaherramienta C.N.C. para un perfecto entendimiento de las prximas unidades. Asimilar la nomenclatura utilizada habitualmente para designar dichos puntos y en los procesos de bsqueda de los mismos. As mismo, conocer cules son los mtodos bsicos de bsqueda, ya que estos procedimientos o variaciones de los mismos (aunque basadas en los mismos conceptos de comparacin) son los utilizados habitualmente en la industria. Transmitir dichos conceptos mediante la explicacin con un control Sinumerik 840 de Siemens, de amplia difusin en el mercado, hacindolos as fcilmente extrapolables a cualquier otro C.N.C. del mercado.
La mquina C.N.C.
Formacin Abierta
Introduccin
Un aspecto muy importante antes de pasar a la programacin y la realizacin prctica de los ejercicios, es comprender perfectamente los sistemas de ejes y de referencias de la mquina. No hemos de olvidarnos que cuando se programa en C.N.C., las coordenadas de los diferentes puntos que han de irse alcanzando, se va haciendo siempre respecto a un determinado punto de referencia. Dicho punto de referencia puede ser fijo, o puede determinarse al inicio de la operacin. La programacin puede ser de tipo absoluto (estableciendo las coordenadas del punto de destino en relacin a un punto de referencia preestablecido) o de tipo incremental o relativo (en relacin al punto inmediatamente anterior), como veremos un poco ms adelante. Adems, dichas coordenadas pueden expresarse bien de forma cartesiana (mediante cotas X, Y, Z), bien de forma polar (mediante radio y ngulo) o incluso hbrida entre ambas.
Figura 2.1.
Centro de mecanizado de 5 ejes modelo VF-5 50TR de Haas.
La mquina C.N.C.
Control Numrico
02
2.1. Sistemas de ejes
Los sistemas de ejes quedan establecidos mediante las normas ISO R841, DIN 66217 o UNE 71-018, donde se definen su denominacin y orientacin. Simplificando al mximo, el criterio a seguir es el siguiente:
El eje Z es siempre el eje paralelo al eje principal de la mquina, por lo que es el primero que deberemos observar para poder ubicar correctamente el resto de los ejes. El sentido positivo acarrea un alejamiento entre pieza y herramienta, considerando que es sta ltima la que se desplaza y la pieza la que permanece fija. Los ejes X, Y son perpendiculares al eje Z. En las mquinas-herramientas en las que la pieza dispone de movimiento rotatorio, como los tornos, el eje X resulta perpendicular al eje de revolucin.
Una programacin positiva determinar un alejamiento entre la pieza fija y la herramienta desplazable. En las mquinas-herramientas en las que es la herramienta precisamente la que dispone de movimiento rotatorio, podemos determinar dos disposiciones bsicas:
Una posibilidad es que la disposicin del eje Z sea vertical, como en las fresadoras, el sentido positivo del eje X est orientado hacia la derecha, observando la mquina desde el husillo principal hacia el cuerpo de la mquina paralelo al mismo.
+Z +Y
+X
Otra posibilidad es que la disposicin del eje Z sea horizontal, como por ejemplo en las mandrinadoras y una parte importante de centros de mecanizado. El sentido positivo del eje X est orientado hacia la derecha, observando la mquina desde el husillo principal hacia la pieza.
+Y
+X +Z
La mquina C.N.C.
Formacin Abierta
Para establecer un correcto posicionamiento y direccionamiento de los ejes cartesianos puede recurrirse a la conocida como 'regla de la mano derecha', donde el dedo pulgar establecer la direccin positiva del eje X, el dedo ndice la del eje Y, y el dedo corazn la del eje Z cuando apunte hacia nuestro cuerpo. Como ya sabemos, los tres ejes cartesianos (X, Y, Z) van a ser la base en la que nos apoyaremos para programar los desplazamientos, pero tambin existen otros ejes a considerar. Algunos de estos ejes son tambin lineales, aunque de carcter auxiliar, pero por su utilidad es especialmente importante la existencia de los ejes de rotacin, utilizados para la programacin de desplazamientos polares (indicando los grados de rotacin de algn elemento giratorio u oscilante, como por ejemplo un plato de torno dotado del correspondiente encder). Pasemos a continuacin a definir dichos ejes en su totalidad.
Los ejes U, V, W son ejes auxiliares paralelos a X, Y, Z respectivamente. Se utilizan cuando encontramos movimientos lineales realizados por otro carro o elemento desplazable linealmente (si dispusiese la mquina de l, claro est). Los ejes P, Q, R son ejes auxiliares de tercer orden, con las mismas caractersticas que los anteriormente citados. Los ejes A, B, C son ejes de rotacin alrededor de X, Y, Z respectivamente. El criterio para determinar el origen y sentido es el utilizado en trigonometra, mirando el eje desde su parte positiva hacia su origen. Los ejes D, E, F son ejes de rotacin auxiliares, alrededor de ejes especiales.
No obstante, ha de recordarse que los ejes U, V, W, P, Q, R tambin pueden determinar direcciones de desplazamiento no paralelas a los ejes principales. En ocasiones algunas marcas pueden variar la aplicacin de estos caracteres, por ejemplo el control numrico Fanuc utiliza los caracteres U, V, W para establecer los desplazamientos en X, Y, Z cuando son incrementales sin utilizar G91 previamente. A continuacin vamos a ir observando la disposicin de ejes de las mquinas ms habituales en un taller de mecanizado.
La mquina C.N.C.
Control Numrico
02
En lo referente a la disposicin en un torno horizontal, puntualizar que las direcciones positivas y negativas de los ejes X, Z se hallan directamente relacionadas con la posicin de la 'torreta' (donde se sita la herramienta). En tornos C.N.C. es habitual que dicho dispositivo (denominado 'revlver') est ubicado en el extremo opuesto, lo que influir en el signo de los ejes. El eje de rotacin C permite el volteo hasta alcanzar una posicin angular controlada, si es que dispone de encder para fijar las posiciones.
Figura 2.2. Disposicin de ejes en torno horizontal.
Es muy importante sealar que la fresadora representada imprime los movimientos de avance mediante el desplazamiento de la mesa (y no de la herramienta), por lo que la disposicin de los ejes est simbolizada de este modo. A efectos de programacin nos resultar indiferente que por ejemplo- sea la herramienta la que se dirija hacia la derecha, o la mesa hacia la izquierda: el resultado final ser el mismo. Como se ver en programacin, el funcionamiento de la mquina no nos supondr problema alguno en este aspecto.
Figura 2.3. Disposicin de ejes en fresadora vertical.
La mquina C.N.C.
Formacin Abierta
A dicha mquina pueden rsele aadiendo diferentes accesorios gobernados mediante C.N.C., por ejemplo, un plato divisor, que se accionara siguiendo los criterios expuestos con anterioridad.
Figura 2.4. Mesa basculante de dos ejes Mori Seiki.
+Y
+B
+X +Z
Comparndolo con el ejemplo anterior, localizamos dos diferencias muy importantes: por un lado, el eje principal (husillo de la herramienta) se encuentra en posicin horizontal, lo que afecta a la distribucin del resto de los ejes. Por otro lado, se incluye una mesa rotativa controlada por un eje de rotacin, en este caso el eje B por tratarse de un eje paralelo al eje Y.
Figura 2.5. Disposicin de ejes en centro de mecanizado.
+Y +U +W
+Z +B
+X
En este otro ejemplo, la existencia de un eje W y un eje Z, ambos paralelos, nos delata la posibilidad de mover el cuerpo principal de la mandrinadora y el cabezal por separado. Lo mismo sucede con el eje X y el eje U, dando la posibilidad este ltimo eje de ajustar el mecanizado de los agujeros con total precisin y quedando reservado el eje X al desplazamiento de la mesa y la pieza que soporta. Existe, adems, un eje de rotacin B (paralelo al Y) que permite la rotacin de la pieza sin tener que voltear y amarrar de nuevo.
Figura 2.6.
Disposicin de ejes en mandrinadora horizontal.
La mquina C.N.C.
Control Numrico
02
No obstante, y aunque existen muchos otros tipos de mquinas gobernables mediante CNC, es fcil determinar cuales son sus ejes guindonos por los parmetros fijados anteriormente. Basta con imaginar las nuevas disposiciones de ejes en tornos verticales, mandrinadoras verticales, etc. En la imagen siguiente puede verse un centro de mecanizado provisto de cinco ejes, ya que a los tres ejes cartesianos X, Y, Z hay que sumarle los dos ejes de rotacin B, C de la mesa basculante: slo la accin combinada de los desplazamientos longitudinales de la herramienta y de la rotacin de la pieza, permite que se puedan realizar mecanizados tan complejos.
Figura 2.7.
Mecanizado con centro de mecanizado de cinco ejes (CNC Fadal).
A modo de ejemplo comparativo, una cortadora lser o de plasma dispone bsicamente de la misma configuracin que la fresadora de husillo vertical que mostramos en los ejemplos; basta con sustituir la bancada donde se apoyan las piezas a fresar por la bandeja de apoyo de las que dispone la cortadora en una misma posicin. Ejemplo prctico A modo de ejemplo, en la siguiente figura puede observarse un moderno centro de torneado del conocido fabricante Mazak. Como observamos en la figura, al igual que otros tornos ms sencillos dispone de un carro desplazable en los ejes X, Z donde se ubica la herramienta de corte, as como de un plato de amarre de las piezas con capacidad para poder orientar y enfrenar el cabezal en una determinada posicin expresada angularmente; el gobierno de dicho cabezal queda asignado al eje de rotacin C, ya que el eje sobre el que gira el citado plato es precisamente el eje Z.
La mquina C.N.C.
Formacin Abierta
Sin embargo, el aspecto ms novedoso de esta mquina radica en su cabezal rotatorio de fresado (con un poco de atencin puede distinguirse en la parte central, justo a la izquierda del panel del control numrico, una herramienta rotada a unos 45), y que es precisamente por el que recibe el nombre de centro de torneado. Si nos atenemos a las reglas comentadas con anterioridad, dicho cabezal rotar en torno al eje B, puesto que se trata de un eje de rotacin paralelo al eje cartesiano Y.
Figura 2.8.
Centro de torneado Mazak Integrex 200.
10
La mquina C.N.C.
Control Numrico
02
2.2. Puntos de orgen y referencias
Prcticamente en cualquier mquina-herramienta con C.N.C. existirn unos puntos de origen y de referencia, que son los que se detallan grficamente a continuacin. Primeramente realizaremos una representacin grfica de dichos puntos en un torno, reservndonos la localizacin en fresadoras y similares para ms adelante. Es importante observar que tanto en cualquier mquina, el punto W (denominado cero pieza, como veremos ms adelante) queda establecido libremente por el usuario, dentro de los lmites de trabajo de la mquina. Por consiguiente, la ubicacin que se le ha dado en la figura siguiente se ha realizado al azar; evidentemente, el usuario podr establecer dicho punto donde ms til le resulte.
F a
microrruptor b
Figura 2.9.
Disposicin del cero mquina y de los puntos de referencia en torno.
A continuacin, mostraremos la ubicacin de los puntos de referencia a considerar en una fresadora (dicha distribucin es igualmente vlida para centros de mecanizado, taladradoras, etc.). Al igual que sucede en la figura anterior, el punto W o cero pieza es determinado libremente por el usuario.
La mquina C.N.C.
11
Formacin Abierta
F a W
Figura 2.10.
Disposicin del cero mquina y de los puntos de referencia en fresadora.
2.2.1.
Definiciones y nomenclatura utilizada
Antes de avanzar con el tema, procederemos a definir cules son los puntos a los que hemos hecho referencia en las imgenes anteriores y cul es el carcter que utilizaremos para definirlos en ocasiones posteriores. Cero mquina (M) El cero mquina (M) o punto de origen de la mquina es el origen del sistema de coordenadas de la mquina, o dicho de otro modo, el punto en el que todos los ejes valen cero. Es un punto prefijado por el fabricante de la mquina, pero cabe la posibilidad de variarlo; ya que los nuevos valores se introducen en los parmetros de la mquina y se resetea, tras lo cual el C.N.C. asume los nuevos valores (no es recomendable hacerlo y evidentemente es una operacin reservada a especialistas, ya que deben modificarse otros parmetros relacionados). En los tornos suele estar en el eje de revolucin en lo que concierne al eje X, mientras que el eje Z suele colocarse en el punto de acoplamiento entre eje motor y plato, por lo que un cambio de plato o de sistema de sujecin no supone problema alguno en dicho aspecto. Tambin es habitual que en el eje Z dicho punto recaiga en la cara exterior del propio plato, pero un cambio de ste por otro de diferentes dimensiones o por otro sistema de fijacin har recomendable desplazar dicho cero a un punto ms conveniente para evitar confusiones. En fresadora puede suceder que el cero mquina coincida con el que denominaremos punto de referencia, por lo que tras hacer referencia (en el correspondiente prrafo se explicar en qu consiste dicha operacin), apareceran en pantalla los valores X0, Y0, Z0. Sin embargo, lo ms habitual es que dichos puntos no coincidan, tal y como queda reflejado en la figura precedente. Estdiese detenidamente dicha imagen.
12
La mquina C.N.C.
Control Numrico
02
Cero pieza (W) Tal y como se mencion anteriormente, el punto de cero pieza es un punto que fija el propio programador a fin de hacer ms sencilla la programacin, y que se establece con respecto al cero mquina. Generalmente suele hacerse coincidir con alguna de las caras de referencia utilizadas para la acotacin desde oficina tcnica en la pieza a mecanizar. Llegados a este punto, debemos recordar que puede efectuarse el posicionamiento de este punto W de dos modos bsicos:
Puede efectuarse mediante una medicin previa de pieza y sistema de sujecin utilizado, introduciendo a continuacin de modo directo los valores numricos adecuados (una suma sencillamente de dicha pieza y el sistema de sujecin). Es por tanto un sistema digamoslo as matemtico, en el que no existe un contacto con la pieza, eso s, si no tenemos en cuenta lo que es la propia medicin con un pie de rey o micrmetro de la pieza. Otro mtodo ms utilizado consiste en lo que podramos denominar una bsqueda de cero al roce. Utilizando una herramienta o algn dispositivo del que conozcamos ya su longitud, podemos acercarnos a la pieza y que sea la propia mquina quien efecte esa suma que hemos comentado en el prrafo anterior. En cualquier caso, el modo de proceder en ambos mtodos se explicar ms adelante.
Cuando las dimensiones de la mquina as lo aconsejan, suelen utilizarse los denominados volantes, en realidad una extensin de los mandos de control de la mquina que permite al operario trabajar con mayor comodidad y precisin cerca del rea de trabajo. En mquinas grandes tales como fresadoras y centros de mecanizado, dado que el teclado suele estar alejado de dicha rea de trabajo y se convierte en un accesorio casi indispensable. Punto de referencia mquina (R) El punto de referencia mquina (R) es un punto fijado por el fabricante de la mquina donde deber posicionarse el carro (para torno) o la mesa (para fresadora) tras el encendido de la mquina, corte del suministro elctrico, impactos, etc. De este modo se asegura el posicionamiento de la mquina sobre un punto conocido y se confirman la exactitud de los datos. O dicho de otro modo, conseguiremos as la sincronizacin de la propia mquina con el C.N.C. que la gobierna. Es obligatorio en el caso de que la mquina posea un sistema de medicin incremental, aunque la mayora de las mquinas trabajan de este modo. En cualquier caso, el carro o la mesa poseen unos microrruptores que entrarn en contacto con unas levas fijadas sobre las guas, cerca ya del lmite de la carrera de cada eje, tras lo cual se disminuye la velocidad, se posiciona el captador y, finalmente, el CNC asume y almacena las distancias xMF y zMF.
La mquina C.N.C.
13
Formacin Abierta
MF (z)
F MF (x) M
Figura 2.11.
Relacin entre cero mquina y punto referencia revlver.
Este punto de referencia mquina se ha simbolizado mediante el carcter R en los apuntes. No obstante, en el monitor del C.N.C. se ofrecern por defecto las cotas del punto F (desde el que se medirn las herramientas), y no de ese punto R.
Punto cero del revlver (F) En torno se trata de un punto mvil del revlver respecto del que se miden las longitudes de las herramientas. Tras inicializar la mquina y hacer referencia, la mquina ya tiene capacidad para poder mostrar en pantalla las cotas de este punto, indispensable para medir cada una de las herramientas. En torno, dicho punto suele localizarse en la cara exterior del revlver, concretamente donde se alojara una broca o herramienta tipo mandrino, coincidiendo de este modo con el eje de dichas herramientas (como puede verse en la figura siguiente a la izquierda, eso conlleva que slo sea necesario medir la longitud en el eje Z de tales herramientas).
b b
Figura 2.12.
Ubicacin del punto cero del revlver (torno).
14
La mquina C.N.C.
Control Numrico
02
No obstante, cuando los carros del torno comiencen a desplazarse, las coordenadas que aparecern en el monitor en relacin a este punto mvil irn variando, y ya no coincidirn con las que el C.N.C. marcaba al hacer referencia. Lgicamente, conforme los carros del torno se vayan acercando al plato, la distancia entre ambos ser cada vez menor y el valor de las cotas que aparezcan en el monitor as habr de ir reflejndolo. Punto de referencia mvil (F) En fresadora, taladradoras, centros de mecanizado, etc., se trata del punto del husillo principal respecto del que se mide la longitud de las diferentes herramientas. Como puede comprobarse observando el dibujo, realmente la longitud a medir es nicamente la altura de la herramienta (en realidad, lo que sobresale desde el punto F), y no la verdadera longitud de la herramienta.
a
Figura 2.13. Ubicacin del punto de referencia mvil (fresadora).
El dimetro de la misma, aunque se trata de otro de los datos a considerar por el C.N.C., no resulta necesario calibrarlo porque evidentemente es un dato conocido directamente al adquirir la herramienta.
La mquina C.N.C.
15
Formacin Abierta
2.3.
Proceso de bsqueda de cero pieza
En este apartado vamos a describir los procesos a seguir para la bsqueda del punto de referencia (Ref. Point.) y tambin de los diferentes ceros pieza que potencialmente puedan interesarnos. En este aspecto no todos los controles numricos actuarn al cien por cien de idntico modo, ya que los mens que aparecen en pantalla lgicamente no son los mismos. Al fin y al cabo estamos hablando de controles numricos de diferentes casas o incluso, dentro de una misma casa, de diferentes versiones ms o menos modernas. Los controles numricos fundamentarn su procedimiento de creacin del cero pieza bien numricamente (sencillamente sumando cotas, como veremos ms adelante), bien mediante una herramienta o dispositivo palpador que ha de estar previamente medido. Como podemos ver, existen dos mtodos bsicos de creacin de ceros pieza. Pero adems, una vez calculado el dato (la distancia existente entre el cero mquina y el cero pieza a crear), existen otras dos posibilidades:
Introducir dicho dato en una de las tabla de las que dispondr el control, o que se guarde directamente en memoria de mquina (cero flotante). Para el primero de los dos casos, el operario podr acceder desde el programa que cree la tabla escogida mediante las funciones ISO adecuadas (G54, G55, G56 o G57 concretamente). Sin embargo, en el segundo de los casos resulta ms sencillo dado que, al no existir estas tablas y pasar directamente a memoria de mquina, no hace falta elegir entre alguna de ellas. A cambio, slo se dispondr de un nico cero, y quizs deba recurrirse posteriormente a engorrosos desplazamientos del sistema de coordenadas e incluso a la posterior bsqueda manual de un hipottico nuevo cero pieza que pudiese necesitarse.
Algunos de los controles numricos existentes en el mercado pueden realizarlo de ambos modos, pero otros nicamente pueden efectuarlo de un nico modo. Es habitual que controles conocidos y muy potentes, estn destinados a trabajos de piezas unitarias (fundamentalmente prototipaje y molde), por lo que no incluyan la posibilidad de varios ceros de pieza preprogramados. El control numrico Sinumerik 840 utilizado aqu, dispone de las tablas accesibles mediante las funciones G54 a G57 (segn norma ISO), as como otras adicionales.
16
La mquina C.N.C.
Control Numrico
02
2.3.1.
Bsqueda de referencia o Ref Point
Como ya comentamos en su momento, al inicio de la jornada de trabajo la mquina o tras algn incidente (paradas intempestivas por corte del fluido elctrico, golpes bruscos, etc.) debe llevarse a cabo una bsqueda de la referencia de mquina. Generalmente, cuando se inicializa la mquina tras un estado anterior de paro, las coordenadas que aparecen en pantalla mostrarn un valor cero, pero esto realmente no es cierto, ya que a efectos prcticos lo que debera indicarnos el C.N.C. es que no tiene consciencia de dnde se hallan los carros o la mesa.
Como es de suponer, algunas de las nomenclaturas aqu utilizadas pueden variar segn el fabricante que se consulte, al igual que vara la consola de un fabricante a otro, el tecleado y el modo de introduccin de datos tambin variar sin lugar a dudas. Sin embargo, en general, las secuencias y los datos solicitados suelen ser los mismos a efectos prcticos.
En las siguientes lneas explicaremos los pasos a seguir para hacer referencia en un torno gobernado mediante control Sinumerik 840T (para torno) y con el teclado de mquina propuesto. Proceso de bsqueda El proceso de bsqueda en un control Sinumerik 840 es realmente sencillo. En el resto de los controles numricos, se efecta de un modo muy similar. Para el ejemplo supondremos la bsqueda con un sencillo torno de dos ejes, aunque si la mquina es ms compleja y posee un mayor nmero de ejes bastar con pulsar las teclas de todos los ejes disponibles. Primeramente ha de colocarse el conmutador rotativo en la primera de las posiciones (paso 1 en la imagen adjunta), para a continuacin pulsar las teclas de accionamiento simultneo de los ejes de la mquina (pasos 2); los carros del torno saldrn automticamente en bsqueda del microrruptor que define el punto de referencia de la mquina en cuestin, para su sincronizacin.
La mquina C.N.C.
17
Formacin Abierta
SIEMENS
SINUMERIK 810D/840D
F1
F
7
G
8
H
9
I
/
J
F2
K
4
L
5
M
6
N
*
O
F3
P
1
Q
2
R
3
S
F4 F5 F6 F7 F8
U
V \ , ? ; <
:
W ! > $
X ,
"
%
End
SINUMERIK 810D / 840D SIEMENS
M
USB
+X +C
1 10
RS-232
40 20 10 6 2 0 60 70 80 90 100 110
SKIP
DRY RUN
1X
OPT. STOP
-Z
+Z
100%
100 1000
SBL
-C
-X
+4
10000
120
0
AUX AUX
1
1
Figura 2.14.
Proceso de bsqueda del Ref. Point (para Sinumerik 840).
Al inicializar la mquina, el contador de desplazamiento para ambos ejes se encuentra a cero, algo irreal si tenemos en cuenta que la distancia entre el punto de referencia y el cero mquina no puede ser cero en el caso de un torno. Expresado de un modo sencillo, es como si la mquina no supiese donde se encuentran los carros realmente. Slo al completarse el proceso descrito aparecer en el monitor las cotas exactas correspondientes a la distancia entre cero mquina y Ref. Point. En el ejemplo siguiente, la pantalla del control Sinumerik 840 mostrara inicialmente las cotas X0, Z0. Tras seguir los pasos descritos para bsqueda del Ref. Point, los carros del torno alcanzaran la posicin X82, Z81. La indicacin WKS que puede verse en pantalla indica que la cota X est expresada en dimetro y no en radio.
18
La mquina C.N.C.
Control Numrico
02
Figura 2.15.
Ejemplo de valores alcanzados tras bsqueda de Ref. Point (control numrico Sinumerik 840M).
Lgicamente esta distancia variar en funcin del tamao de la mquina y la carrera que posea, es decir, depender bsicamente del torno y no del C.N.C. adquirido para equiparlo. En las fresadoras y centros de mecanizado, en principio con mayor nmero de ejes, la bsqueda automtica se efectuar de modo similar. Para este tipo de mquinas, el primer eje en desplazarse ser el Z, luego el eje X y finalmente el eje Y. El que sea el eje Z el primero en desplazarse retirndose en la vertical, minimiza el riesgo de colisiones con la pieza o el utillaje. Como informacin adicional, citar que para forzar la bsqueda de referencia de algn eje por separado, en la mayor parte de los controles generalmente se pulsa primeramente la tecla correspondiente a dicho eje (por ejemplo el eje Z) y luego se pulsa la tecla de bsqueda de referencia. De ese modo, en el ejemplo anterior solamente el eje Z hara referencia.
La mquina C.N.C.
19
Formacin Abierta
En la imagen siguiente puede verse el aspecto que presenta otro control, concretamente el control Fagor 8055MC conversacional.
Figura 2.16.
Ejemplo de valores alcanzados tras bsqueda de Ref. Point (control numrico Fagor 8055 MC).
2.3.2.
Decalaje de origen en torno: la bsqueda del cero pieza
La expresin conocida como decalaje de origen se refiere al valor numrico introducido para indicar la distancia del cero mquina (M) al cero pieza (W). No ha de olvidarse que el cero mquina propuesto por el fabricante de la mquina no nos resulta cmodo dada su ubicacin, y casi con total seguridad nos ser ms cmodo posicionar el cero pieza en otro lugar. Dicho de un modo sencillo, reposicionaremos temporalmente el sistema de coordenadas a nuestro inters. De este modo pueden utilizarse las coordenadas que encontraremos en el plano que nos suministren, sin necesidad de hacer complicados reajustes de todas y cada una de las cotas. Evidentemente, el lugar de ubicacin de dicho cero pieza es un asunto importante, ya que afectar al resto de la programacin. En definitiva, lo ms importante en este aspecto es ubicarlo teniendo en cuenta la acotacin suministrada en el plano de la pieza, los utillajes de sujecin que se utilizarn y las caras o planos de la pieza que se utilizarn como referencia para las mediciones, entre otros factores. Es fcil deducir, por tanto, que resulta imprescindible una correcta interpretacin de los planos, una secuenciacin clara de las tareas y una planificacin previa de los amarres antes de proceder a programar, unas tareas en las que se vern involucrados tanto los departamentos de Oficina Tcnica como de Produccin.
20
La mquina C.N.C.
Control Numrico
02
Los valores numricos suelen introducirse a pie de mquina en las tablas de decalajes (ver tema de Programacin, funciones G54 a G57).
Figura 2.17.
Ejemplo de seleccin de la tabla de decalaje G54.
En el control Sinumerik 840 concretamente, se alude a las funciones G54 a G57 como decalajes de cero ajustables. El modo de acceder a estas tablas se especificar en el momento adecuado, el la unidad destinada a explicar el funcionamiento del software. Suponiendo que ya nos hallamos en la pantalla debida, en el ejemplo anterior puede observarse la tabla de decalaje accesible mediante G54 (si observa la mano, podr ver que queda especificado donde dice Indicador G: G54). En dicho ejemplo, se ha definido una distancia de cero mquina a cero pieza de 300 mm, en el campo correspondiente al eje Z.
Sin embargo, en muchas ocasiones puede fijarse un cero pieza sin tener necesariamente que introducir un valor numrico en las mencionadas tablas. E incluso ciertos controles ni siquiera disponen de ellas al trabajar con un nico cero (por ejemplo, control Fanuc 21 TC, que citaremos en los ejemplos comparativos de programacin), aunque puede cambiarse su ubicacin cuando resulte necesario.
A modo adicional, si se observa con atencin la imagen anterior puede comprobarse que junto al decalaje grueso que propone el control Sinumerik 840, existe a su derecha el denominado decalaje fino donde pueden introducirse nuevos valores de desplazamiento.
La mquina C.N.C.
21
Formacin Abierta
Dependiendo de su signo positivo o negativo, estos valores se sumarn o se restarn al decalaje grueso inicial. No es necesario su uso, pero puede resultar til para efectuar pequeos ajustes de medida. La funcin G53 anula el decalaje de cero ajustable (el que se est utilizando en ese momento en el programa) nicamente en el bloque en el que se haya escrito dicho G53. De ese modo, en ese bloque puede enviarse la herramienta o el revlver segn se halla aplicado o no la lectura de la tabla de herramientas D- a un lugar determinado cuyas coordenadas estarn expresadas con relacin al cero mquina, y no con relacin al cero pieza. Esto es una estrategia utilizada, por ejemplo, para efectuar el cambio de herramienta o los alejamientos a un punto conocido, independientemente del cero pieza que se haya fijado para esa pieza. Veamos como programarlo:
T2 D0 G53 X300 Z400
En este caso, estaramos enviando el punto de referencia del revlver a la posicin X300 Z400. Esta posicin estara dada en relacin al cero mquina. Tambin puede verse que existe la posibilidad de aplicar un giro expresado en grados o efectuar un escalado. En algunos de los ejercicios propuestos se recurrir en alguna ocasin al uso de estas posibilidades adicionales.
2.3.2.1.
El concepto de frames programables
Los frames alteran el sistema de coordenadas que est establecido en ese momento. Han de programarse en un bloque aparte. Como podr comprobar ms adelante en el fichero a descargar sobre Programacin, existen cuatro tipos de frames aplicables:
� � � �
Para desplazar el sistema de coordenadas: TRANS y ATRANS. Para girar el sistema de coordenadas: ROT y AROT. Para aplicar un factor de escala: SCALE y ASCALE. Para establecer una simetra en el sistema de coordenadas: MIRROR y AMIRROR.
Los frames TRANS y ATRANS sustituyen a los antiguos G58 y G59, los antiguos decalaje de cero ajustable programables. En realidad no dejan de ser unos decalajes aditivos, en los que la distancia especificada se viene a sumar a los G54G57 programados previamente (con TRANS y ATRANS indistintamente), o incluso a un decalaje TRANS programado previamente (si se utiliza ATRANS).
22
La mquina C.N.C.
Control Numrico
02
100
250
G54
TRANS
Figura 2.18.
Posibilidad de decalaje mediante G54 y TRANS.
En el ejemplo anterior, en lugar de especificar directamente la distancia entre cero mquina y cero pieza indicando el valor de la suma total (350 mm. en el ejemplo), cabe la posibilidad de especificar primeramente en G54 la distancia de cero mquina a la cara derecha del plato de amarre, y luego mediante el frame TRANS especificar la longitud de la pieza. Evidentemente, los 100 mm. que asignaramos para G54, han de programarse por el operario previamente en dicha tabla de decalaje. Veamos cmo programarlo:
G54 TRANS X0 Z250
En los ficheros a descargar sobre Programacin, pueden verse los formatos a aplicar para el resto de los frames, por tanto no insistiremos ms en ellos. Por el momento, basta con que tengamos una nocin de su utilidad: realizar decalajes programables, rotar el sistema de coordenadas (ms til en fresadora, para programar fcilmente contornos con un determinado ngulo con relacin a alguno de los ejes), escalar una pieza, o hacer imgenes espejo de una pieza. No obstante, para que el alumno pueda comprobar sus aplicaciones en la unidad de ejemplos de mecanizado completos se har un uso apropiado de dichos frames. Ser la forma ms prctica de mostrar su utilidad real.
La mquina C.N.C.
23
Formacin Abierta
2.3.2.2.
Procesos de bsqueda de cero pieza
En las siguientes lneas explicaremos los pasos a seguir para establecer un cero pieza en un torno gobernado mediante control Sinumerik 840T, con el teclado de mquina propuesto. Estableceremos los mtodos bsicos para torneado muy sencillos, cuyos conceptos son aplicables a la mayor parte de las mquinas, aunque las teclas pulsadas no sean exactamente las mismas. Opcin 1 para torno: proceso de bsqueda mediante medicin directa En este caso, el establecimiento de la distancia entre los puntos M y W (distancia de cero mquina al cero pieza) se efectuara sin que la herramienta entre en contacto con a la pieza, recurrindose a la medicin directa de la pieza. Dicha medicin la realizar previamente el operario, en principio.
100
250
Figura 2.19. Posicionamiento directo sin sobremetal.
Veamos a continuacin cules son los pasos a seguir, suponiendo que deseamos ubicar un cero pieza a 250 mm. de uno de los extremos del tocho cilndrico, y teniendo en cuenta que la distancia entre el cero mquina y la cara del plato donde se apoya la pieza es de 100 mm. Como puede observarse, la existencia o no de un sobrante de material en el frontal no afecta a la ubicacin del cero, ya que el posicionado se efecta numricamente, es decir, sumando cotas, sin ms. En el dibujo anterior, ha de suponerse la pieza refrentada previamente.
~ 5
De no haber sido as, ha de colocarse una pieza bruta de mayor longitud (por ejemplo 255 mm), ubicar el cero a 250 mm. y evidentemente proceder luego a refrentar la pieza para eliminar el material sobrante resaltado en la imagen adjunta.
100
250
Figura 2.20. Posicionamiento directo con sobremetal.
24
La mquina C.N.C.
Control Numrico
02
El dato ha de introducirse en alguna de las tablas de decalajes disponibles, a las que posteriormente se llamar desde el programa con las funciones G54 a G57 (ver ficheros descargables sobre Programacin). En este ejemplo, el valor a introducir en el ejemplo sera de un total de 350 mm.
Si, como es habitual en ciertas mquinas, el cero mquina estuviese localizado en la cara frontal del plato y no donde se ha sealado en el ejemplo anterior, ya no debera contarse con la distancia de 100 mm. aqu reflejada. Como puede deducirse, antes de proceder a programar en una mquina ha de averiguarse donde estn ubicadas todas sus referencias.
Veamos a continuacin un ejemplo del formato que puede presentar las tablas de decalajes de un control numrico (ejemplo Sinumerik 840T). El aspecto para una fresadora sera prcticamente el mismo, ya que tan slo habra que constatar la presencia de tres ejes (X, Y, Z) y no dos (X, Z).
Figura 2.21.
Introduccin en tabla de decalaje del ejemplo (ejemplo con tabla G56).
Tras la introduccin manual del valor numrico, recurdese que ha de pulsarse la tecla memorizar para confirmar dicho valor.
La mquina C.N.C.
25
Formacin Abierta
En definitiva, este mtodo evita la utilizacin de herramientas de corte o palpadores para el posicionamiento correcto del cero pieza, aunque exige ser minuciosos con las mediciones y conocer la longitud efectiva del plato (lo que hace que muchas personas no sean partidarias de este sistema). Para conocer la longitud efectiva del plato, habramos de acercar el revlver hasta tocar el plato del torno, fijndonos en la cota en Z aparecida en pantalla (en el ejemplo anterior, 100 mm. concretamente). Tal y como veremos, tras la toma del cero pieza podremos enfrentarnos a dos casos:
Que haya que mecanizar la pieza y proceder a su tronzado. nicamente se necesitar conocer a qu distancia debe cortarse la pieza, programar el acercamiento de la herramienta hasta el punto adecuado y proceder al tronzado, teniendo en cuenta previamente el ancho de la cuchilla y la existencia de unas garras de amarre o utillajes que pudiesen impedirlo. Ver tema de ejemplos prcticos. Que haya que mecanizar una primera mitad de la pieza y luego proceder a su volteo para efectuar el mecanizado de la segunda mitad. En este caso procederemos tras el volteo a la reubicacin del cero pieza, y proceder como si se tratase de un nuevo programa. Ver para ello la unidad con los ejemplos prcticos.
Una operacin necesaria para poder efectuar una medicin directa: la medicin de la longitud efectiva del plato Tal y como se explic, es necesario conocerla cuando se desea sumar a esta longitud la que posea la pieza, para as determinar la distancia total de decalado. Este sistema tambin puede aplicarse cuando se trabaja con utillajes o con elementos de amarre mecanizados en el propio taller. En primer lugar, hemos de hacer referencia (Ref Point), y a continuacin, acercarnos con el revlver hasta el frontal del plato.
Figura 2.22.
Acercamiento del revlver al plato del torno.
26
La mquina C.N.C.
Control Numrico
02
Han de tenerse en cuenta dos cosas: por un lado, alguna de las posiciones del revlver ha de estar libre de herramientas para poder llevar a cabo un contacto fsico directo con el plato, y por otro lado, ha de posicionarse el plato de tal forma que ninguna de sus garras de amarre estorbe para establecer contacto.
Figura 2.23. Toma de contacto revlver plato.
En este ejemplo, si en el monitor aparece un valor numrico de 81 mm. en lo que respecta al eje Z, podemos deducir que es sta la longitud efectiva del plato, es decir, la distancia entre el cero mquina y la cara exterior del plato.
Figura 2.24.
Cota en Z tras toma de contacto revlver plato.
La cota que aparezca en el eje X no posee relevancia, ya que nicamente se est buscando la distancia en el eje horizontal. Tal y como se coment anteriormente, existen algunos tornos en los que el cero mquina est ubicado precisamente en dicha cara, por lo que de trabajar con el plato original, el valor indicado al establecer contacto debera ser cero. Slo en el caso de colocar un plato o un elemento de amarre de diferente longitud sera til efectuar la medicin para comprobar el desfase existente.
La mquina C.N.C.
27
Formacin Abierta
F M
Si fuese necesario conocer la distancia efectiva del plato ms las garras de amarre, se procedera del mismo modo, salvo que en esta ocasin debera establecerse el contacto en la superficie de dichas garras (en vez de la cara frontal del plato) y leer en el monitor el valor en Z correspondiente.
Figura 2.25. Toma de contacto entre el revlver y las garras de amarre.
Opcin 2 para torno: proceso de bsqueda al roce, con el revlver En este caso, el clculo de la distancia entre los puntos M y W (distancia cero mquina a cero pieza) se efecta rozando directamente el revlver con la cara frontal de la pieza, previamente refrentada. Es precisamente en este aspecto donde debe ponerse un cuidado extremo, acercndonos centsima a centsima en modo JOG (modo de accionamiento manual) hasta rozar con el revlver la superficie refrentada de la pieza. Se trata de una operacin delicada, que habr que realizar con un avance muy bajo. Para asegurarnos que se ha producido dicho contacto fsico, puede interponerse un papelito muy fino o una laminilla metlica fina de espesor conocido, que habr que descontar posteriormente.
F
M W
MW
Figura 2.26.
Acercamiento del revlver (izq.) y roce del revlver con pieza (dcha.).
Una vez se halle el revlver en contacto con la superficie de la pieza, basta con leer las coordenadas que aparecen en pantalla para el eje Z. Si por ejemplo, en el momento de establecer contacto leysemos en pantalla Z300, deberamos introducir dicho valor en la tabla de decalaje que se desee (G54 a G57). De este modo, dejaramos establecida la distancia cero mquina a cero pieza en 300 mm. en el eje Z.
28
La mquina C.N.C.
Control Numrico
02
Opcin 3 para torno: proceso de bsqueda automtico al roce, con la herramienta En este caso, el establecimiento de la distancia entre los puntos M y W (distancia cero mquina a cero pieza) se efectuara ayudndonos de una herramienta previamente calibrada. Es precisamente en este aspecto donde debe ponerse un mayor cuidado, para que no existan errores en los datos de la herramienta calibrada que afecten a la toma correcta del cero pieza. Bastar con rozar la cara derecha de la pieza refrentada o efectuar un refrentado de la misma, para a continuacin consultar el valor de Z en el monitor (en realidad, all estaremos observando la coordenada en Z del punto mvil del revlver F). Luego habr de descontarse la longitud de la herramienta empleada. El valor resultante de dicha resta es la distancia de plato ms pieza. Veamos a continuacin un ejemplo, asignando unos valores numricos que nos ayuden a comprender dichos conceptos.
8 M
Figura 2.27.
Acercamiento del revlver.
En la imagen anterior, podemos ver una herramienta previamente calibrada, acercndose a la cara derecha de la pieza que se supone refrentada. La longitud en la horizontal (Largo 2) de dicha herramienta es de 8 mm.
La mquina C.N.C.
29
Formacin Abierta
160 168
Figura 2.28.
Roce con la herramienta, previamente medida.
Cuando se efecte el roce, la cota Z que aparecer en el monitor de nuestro control numrico ser Z168, es decir, nos indicar la posicin que ocupa el punto F del revlver en ese instante. La distancia entre la cara de la pieza y dicho punto F del revlver es en este ejemplo de 8 mm, y como puede verse se trata a efectos prcticos del voladizo de la herramienta (Largo 2 o medida de la herramienta en la horizontal). Por tanto, si a la distancia indicada en el monitor le restamos esos 8 mm, obtendremos la distancia MW entre el cero mquina y la cara de la pieza donde se desea ubicar el cero pieza. Dependiendo del modelo de control numrico empleado, dicha resta habr de efectuarla el propio operario, o bien utilizar el men adecuado para que sea el propio control quien efecte la resta. En cualquier caso, siempre se trata de una mera resta.
Figura 2.29.
Acceso a la primera de las Tablas de Decalaje.
30
La mquina C.N.C.
Control Numrico
02
En el control Sinumerik 840, para efectuar de manera automtica el clculo basta con acudir a la opcin Calcular Decalaje, tras lo cual aparecer un men flotante donde deber especificarse el nmero de la herramienta (posicin T que ocupa en el revlver, y tabla de datos de herramienta D donde se almacenan los datos de la misma), con la que se est efectuando el contacto. Recurdese que si se sigue este mtodo la herramienta ya ha sido medida previamente, y que en la tabla D se ha indicado que la longitud Largo 2 es de 8 mm.
Figura 2.30.
Indicacin de la herramienta utilizada en el roce.
Por lo dems, podra utilizarse un dispositivo palpador o un dispositivo ptico, de los que conozcamos ya su longitud (por lo tanto, a efectos prcticos nos hallaramos ante el mismo caso de la herramienta comentado anteriormente). Con ellos se produce y se efecta un contacto fsico muy preciso (con elevada precisin gracias al aviso sonoro y/o luminoso que proporciona un dispositivo palpador), o incluso se evita el contacto fsico con un dispositivo ptico.
Supongamos que deseamos ubicar el cero pieza en la cara exterior refrentada de un tocho cilndrico, mediante el uso de un palpador con un voladizo de 100 mm. Si tras tomar contacto con la cara refrentada de la pieza obtenemos una cota en Z de 260 mm, el valor real a considerar en Z es de 160 mm (260 mm 100 mm = 160 mm).
En la prctica los procesos pueden presentar un grado de sofisticacin ms o menos elevado, pero como puede verse por regla general casi todos suelen partir de unas mismas ideas base.
2.3.3.
Decalaje de origen en fresadora: la bsqueda cero pieza
del
Los procedimientos se basan en criterios similares a los descritos para torno, ya que al fin y al cabo siguen tratndose de sumas y una comparativa. Obviamente s cambiarn los ejes de desplazamiento, y hasta cierto punto los dispositivos que pudiesen utilizarse.
La mquina C.N.C.
31
Formacin Abierta
Adems, no se mencionarn las frames de nuevo, dado que su concepto y formatos de programacin son idnticos. En las unidades correspondientes, en los ejemplos prcticos podr verse su aplicacin prctica.
2.3.3.1.
Procesos de bsqueda de cero pieza.
En las siguientes lneas explicaremos los pasos a seguir para establecer un cero pieza en una fresadora o centro de mecanizado gobernado mediante un control Sinumerik 840, con el teclado de mquina propuesto. Estableceremos unos mtodos bsicos muy sencillos, cuyos conceptos son aplicables a la mayor parte de las mquinas, aunque las teclas pulsadas no sean exactamente las mismas. Otros posibles mtodos sern en gran proporcin, una variacin de los aqu descritos. Opcin 1 para fresa: proceso de bsqueda mediante medicin directa en los ejes X, Y, Z. Ubicacin en la pieza o en el til de amarre. En realidad poco hay que aadir a los ejemplos para torneado expuesto anteriormente. No obstante, y por si acaso unas imgenes pudiesen aclarar ciertos conceptos con mayor rapidez, hemos incluido un ejemplo de asignacin directa de valores. Eso s, este mtodo no puede utilizarse con tanta facilidad como aqu se describe, ya que exige conocer previamente la posicin del elemento de amarre utilizado, por lo que al fin y al cabo es habitual haber tenido que realizar un cuidadoso posicionado previo de ste. Es por ello por lo que slo suele utilizarse en centros de mecanizado provistos de sofisticados y precisos dispositivos de amarre (que aseguran unas medidas y unas tolerancias muy ajustadas), o complejos utillajes de diseo propio, que justificaran as el tiempo invertido. Como puede verse en la imagen adjunta, al conocerse las dimensiones y posicin de los puntos de amarre resulta factible la asignacin de valores numricos directos a las tablas de decalajes (G54 a G57).
Figura 2.31. Torre de doble mordaza Rhm.
32
La mquina C.N.C.
Control Numrico
02
Veamos un ejemplo ms sencillo en la figura siguiente: suponiendo que se conoce la posicin de algn punto interesante para el posicionado de la pieza, un tope en el dispositivo de sujecin servira como cero pieza para el punto W1 (por ejemplo, G54), y el centro de la cajera podra servir como un segundo cero pieza para el punto W2 (por ejemplo, G55). De conocerse el posicionamiento exacto de amarre de la mordaza, sera indudablemente muy cmodo el ubicar las distancias entre el cero mquina y ambos ceros pieza en dos tablas de decalajes libres.
W2 W1
Figura 2.32.
Ejemplo de posibles posicionamientos para los Ceros Pieza.
Si en el ejemplo anterior la distancia entre el cero mquina M y el cero pieza W1 fuese de 100, 400 y 25 mm. en los ejes X, Y, Z respectivamente, quedara reflejado as en la tabla de decalaje escogida:
Figura 2.33.
Ejemplo de ubicacin del cero pieza en la tabla G54.
La mquina C.N.C.
33
Formacin Abierta
Opcin 2 para fresa: proceso de bsqueda manual al roce, en plano XY y en eje Z por separado. Ubicacin inicial en el til de amarre. Pasemos a continuacin en usar un dispositivo tipo reloj, muy utilizado para este tipo de aplicaciones. Pero esta vez situaremos el cero pieza en un lugar ptimo del til de amarre (en este ejemplo una mordaza estndar), y ms adelante lo reubicaremos en el lugar adecuado de la pieza si procede. Como ya se explic para torno, existen sistemas de medicin mecnicos y pticos ms precisos que el mero contacto con un papel o una laminilla metlica fina. En cualquier caso, como se podr comprobar a continuacin se siguen utilizando unos criterios de actuacin muy similares a los expuestos anteriormente. De hecho, y aunque vamos a utilizar un ejemplo de bsqueda mediante un reloj inicialmente, bien podra utilizarse perfectamente un palpador como el de la figura adyacente. Se actuara de un modo similar al descrito.
Figura 2.34. Palpador Renishaw.
En lo referente al plano XY, deberemos determinar primeramente cul es el lugar ptimo para la ubicacin del cero pieza. Si observamos la mordaza simbolizada en la siguiente figura, podemos observar que la pieza que se coloque descansar inevitablemente sobre las dos guas paralelas que se hallan sombreadas. Obsrvese adems la ubicacin del cero mquina M en una de las esquinas de la mesa de la fresadora.
M
Figura 2.35. Mordaza y guas sobre la que descansar la pieza en bruto.
34
La mquina C.N.C.
Control Numrico
02
Tal y como se halla dispuesta la mordaza, la pieza bruta una vez posicionada encima de las guas quedar dispuesta del siguiente modo. La flecha de la imagen indica el traslado a realizar (decalaje de origen), para que el cero pieza W1 quede ubicado en un punto fcil de localizar. Su localizacin se va a llevar a cabo en este ejemplo con la ayuda del citado reloj.
M
W1
Figura 2.36. Ubicacin deseada para el cero pieza en el ejemplo.
La estrategia va a consistir en tocar el tope de la mordaza donde ha de ubicarse el cero pieza, en cada uno de los ejes trabajados (X, Y). El eje Z se trabajar ms adelante. En las siguientes imgenes puede verse como se procede: se coloca el control de la mquina en modo manual JOG, se va desplazando la mesa de la fresadora en el eje X hasta que la sonda cermica del reloj haga contacto y comience a moverse la aguja, parando el desplazamiento de la mesa cuando la aguja haya llegado al cero (est completamente vertical).
En algunos de los relojes, la bola de la sonda que establece contacto no est compensada, por lo que el operario ha de contar con el radio de la misma a la hora de efectuar los clculos. En el reloj utilizado para el ejemplo ya se considera el radio, por lo que cuando alcanza el cero no ha de tenerse en cuenta el valor del radio de la bola. Por eso se ver en la imagen la sonda ligeramente desviada.
En la imagen de la izquierda se supone que le mesa de la fresadora est avanzando, y que la aguja del reloj est desplazndose en sentido horario para alcanzar la posicin cero. En la imagen de la derecha ya se ha alcanzado; eso implica que el eje del husillo de la mquina est situado exactamente sobre el punto que deseamos sea el cero pieza, es decir, la esquina del tope metlico de la mordaza.
La mquina C.N.C.
35
Formacin Abierta
Figura 2.37. Mesa de la fresadora desplazndose (imagen izquierda), y mesa detenida cuando se ha alcanzado la posicin compensada correcta.
En ese instante, habr que consultar la cota que aparece en la pantalla del control numrico en el eje X.
X Y Z A C
337.000
mm
0 0 0 0 0
mm 100.500 Posicin para Cero mm 50.000 Pieza en X 0.000 0.000 mm mm
Figura 2.38.
Valor en eje X aparecido en pantalla.
Si por ejemplo apareciese en pantalla la cota X337, sera el valor a introducir en la tabla de decalajes que se escoja (por ejemplo, la primera tabla de las existentes y que como ya sabemos llamaremos en el programa mediante la funcin G54). Por supuesto habr de repetirse el proceso en el eje Y, esta vez tocando la cara perpendicular de la mordaza. En el control Sinumerik 840 existe una opcin verdaderamente til al respecto: para fijar en la tabla de decalajes escogida la posicin que ocupe en ese instante el husillo, existe la posibilidad de utilizar la tecla rpida Aceptar Posicin. Dado que el reloj de las figuras anteriores est compensado, es decir, no es necesario contar con el radio de la bola, bastara con escoger dicha opcin para fijar las cotas como cero pieza. Es importante recordar que en el momento de pulsar la tecla, se aceptar slo la cota del eje que est activo en la pantalla (viendo el color anaranjado, puede deducirse que en la imagen siguiente es el eje X el activo).
36
La mquina C.N.C.
Control Numrico
02
Cota que ocupara el husillo en X, en el momento de pulsar
Aceptacin de la posicin actual como Cero Pieza
la tecla Aceptar Posicin
Figura 2.39.
Tecla rpida para aceptacin de cota.
Sin embargo, ha de tenerse en cuenta que utilizando la tecla rpida Aceptar Posicin no se tiene en cuenta el radio de la herramienta utilizada; ya que slo se memoriza la posicin real del husillo. Esto es muy importante porque de utilizarse una herramienta para rozar la pieza, nos dara la cota del husillo o del eje de la herramienta, pero no la del punto de contacto con la pieza.
En lo referente al eje Z, tambin puede efectuarse la medicin del eje Z con este tipo de relojes, siempre y cuando la sonda lo admita. Presenta el inconveniente de que la Z que aparecer en pantalla no es asumible directamente, ya que ha de restarse la longitud del dispositivo y como puede deducirse, eso implica conocer previamente dicha longitud mediante una medicin previa, como si se tratase de una herramienta ms del cambiador. Por ello vamos a utilizar para el ejemplo otro dispositivo de medicin, de 100 mm. de altura utilizado para medir las herramientas habitualmente, pero que puede servirnos con total garanta y aadir un nuevo ejemplo de modo de trabajo.
La mquina C.N.C.
37
Formacin Abierta
Como habr podido adivinarse, si la pieza en bruto descansa sobre las guas de la mordaza, en principio lo ms cmodo ser efectuar el posicionado del cero pieza sobre las mismas: cualquier pieza, tenga la altura que tenga, descansar sobre dichas guas. Ms adelante puede variarse la posicin de dicho cero, por ejemplo hacia la cara superior de la pieza.
Figura 2.40. Ubicacin del punto de referencia mvil (F)
Pues bien, bastar con situar el cabezal (y su punto de referencia mvil F indicado en la imagen anterior) sobre dicho dispositivo, que sabemos posee 100 mm. de altura. A la cota en el eje Z que aparezca en pantalla, ha de restarse esos 100 mm. para determinar la altura real a la que estn situadas las guas. Veamos el ejemplo con valores numricos:
X Y Z A C
Figura 2.41.
354.000 100.500 213.000 0.000 0.000
mm mm mm mm mm
0 0 0 0 0
Cota indicada en Z al efectuar contacto.
En nuestro ejemplo, la cota que aparece en pantalla al efectuar el contacto es Z 213 mm, que es en realidad la alcanzada por el punto de referencia mvil F. Si le restamos los 100 mm. que mide dicho aparato, podemos deducir que las guas se hallan a slo 113 mm. del cero mquina, ubicado en la mesa de la fresadora.
38
La mquina C.N.C.
Control Numrico
02
F
213 100 113
Figura 2.42.
M
Equivalencia entre las cotas trabajadas en el ejemplo.
Finalmente, para reubicar un cero pieza en una posicin todava ms cmoda, podemos hacer uso de la funcin TRANS. Anteriormente se haba elegido una esquina para ubicar ese cero pieza, denominado W1. Ahora vamos a suponer que deseamos ubicar el cero pieza en el centro de la cara superior de la pieza. Partiremos para el ejemplo de un tocho bruto de 250 x 240 x 230 mm.
W2 W1
Figura 2.43.
Reubicacin del Cero Pieza.
El programa C.N.C. podra comenzar del siguiente modo, teniendo en cuenta que el operario habra introducido previamente la posicin del cero pieza W1 inicial en la tabla de decalaje (en la accesible mediante G54).
N0005 N0010 N0015 N0020 G54 TRANS X125 Y120 Z230 T1 D1 ...
Para desplazar el cero pieza hasta el centro de la cara superior, han de indicarse las longitudes aqu descritas (mitad del largo, mitad del ancho, altura)
Figura 2.44.
Ubicacin de la funcin TRANS en el programa.
La mquina C.N.C.
39
Formacin Abierta
Opcin 3 para fresa: proceso de bsqueda automtico al roce, en ejes X, Y, Z simultneamente. Ubicacin en la pieza o en el til de amarre. Tal y como suceda para torno, si se tocase la pieza con una herramienta medida previamente para efectuar de manera automtica el clculo basta con acudir a la tecla rpida Calcular Decalaje. Posteriormente aparecer un men donde deber especificarse el nmero de la herramienta (posicin T que ocupa en el revlver, y tabla de datos de herramienta D donde se almacenan los datos de la misma) con la que se est efectuando el contacto. Se procede de manera similar a como ya se explic en el apartado para torno.
Muchos controles facilitan la bsqueda del cero pieza utilizando una herramienta y tocando directamente el lugar elegido, avisando al control de qu herramienta se est utilizando. Eso s, no ha de olvidarse que eso implica el uso de una herramienta medida previamente, y que el reglaje de la misma ha debido ser muy escrupuloso si se desea no transmitir errores.
Veamos cmo se efecta a cabo esta operacin en Sinumerik 840:
Contacto entre herramienta y pieza.
R=8 635.6
Tomemos el ejemplo de realizacin para la ubicacin del cero pieza en el eje X. Tras acercarnos en modo manual JOG hasta la posicin de la figura, vemos que el husillo de la mquina (y por tanto el eje de la propia herramienta) se halla en la posicin X635.6 en relacin al cero mquina. Se desea ubicar el cero pieza en el puntito negro de la figura lateral. Utilizaremos para ello una fresa de radio 8 mm.
Figura 2.45. Toma de contacto fsico.
Una vez hayamos accedido a la tabla de decalajes, ste debera ser el aspecto que presentase si no haba otro cero grabado anteriormente. Si observamos con atencin la pantalla de la imagen inferior, podremos ver que en el campo Posicin, en el eje X la posicin actual del husillo es concretamente X635.600 mm. Sin embargo, el campo resaltado (Decalaje Grueso) est por el momento a X0.
40
La mquina C.N.C.
Control Numrico
02
Figura 2.46.
Tabla de Decalajes sin clculo de los datos.
Pensmoslo por un momento, si nos acercsemos con la herramienta hasta tomar contacto, como se ve en la figura anterior, la cota del punto de contacto sabiendo que la herramienta es de radio 8 mm. es fcil de deducir; basta con sumar ambas cotas, lo que arroja un resultado de X643.000. Ah es donde pretendemos ubicar el cero pieza. La tecla rpida Calcular Decalaje se encargar de efectuar dicha suma, procediendo del modo siguiente: Pulsaremos primeramente la tecla Calcular Decalaje, aparecer en pantalla inmediatamente un nuevo men flotante.
Figura 2.47.
Men flotante de confirmacin de herramienta.
La mquina C.N.C.
41
Formacin Abierta
En dicho men ha de indicarse la herramienta utilizada (herramienta T1 en el ejemplo), as como cambiar el estado del campo Radio 1 que puede verse resaltado en la figura anterior. Para ello ha de activarse la casilla adjunta a la palabra Radio 1 y aparecer ese signo +. Posteriormente, al confirmar con el OK del men principal, se sumar el radio a la cota X del husillo el valor del radio. El resultado final del clculo automtico se ver reflejado en pantalla de este modo:
Figura 2.48.
Confirmacin del cero pieza en el eje X.
Evidentemente, habra que actuar del mismo modo para el clculo de los ejes Y, Z restantes, sin olvidar que la herramienta debera estar previamente medida para conocer cul es su altura efectiva real (Largo 1 en la tabla de herramientas).
42
La mquina C.N.C.
Control Numrico
02
Resumen
Una mquina gobernada mediante C.N.C. dispone de una serie de ejes de trabajo, que variarn en nmero y disposicin en funcin de la mquina. Los ejes lineales principales se denominan X, Y, Z, mientras que los ejes de rotacin principales se denominan A, B, C. As mismo, existen ejes lineales auxiliares (U, V, W) y ejes de rotacin auxiliares (D, E, F), e incluso todava pueden disponerse de ms. El cero mquina viene definido por el fabricante y determina el punto X0, Y0, Z0 absoluto de la mquina. El cero pieza es un origen colocado por el usuario de la mquina a una determinada distancia del cero mquina, ya que ste no suele encontrarse ubicado en una posicin cmoda para el programador. El punto de referencia o Ref. Point. es un punto conocido establecido por el fabricante, que debe alcanzarse tras el encendido de la mquina, corte del suministro elctrico, impactos, etc. En torno disponemos del punto cero del revlver, un punto mvil respecto del que se miden las longitudes de las herramientas. Por otra parte, en fresadora, taladradoras, centros, etc. existe un punto del husillo principal denominado punto referencia mvil, respecto del que se mide la longitud en Z de las herramientas. La bsqueda de un cero pieza adecuado en la mquina puede efectuarse por dos procedimientos bsicos: bien mediante asignacin directa de valores numricos conocidos, bien al roce entrando en contacto con la pieza mediante un dispositivo que posea unas dimensiones conocidas, como puede ser una fresa, un palpador de cantos, sondas 2D y 3D, etc.
La mquina C.N.C.
43
Вам также может понравиться
- Manual de La Maquina HPGRДокумент125 страницManual de La Maquina HPGRluchin84100% (5)
- Posicionado y control de la estructura en bancada. TMVL0309От EverandPosicionado y control de la estructura en bancada. TMVL0309Оценок пока нет
- Alineación - Curso - Material Apoyo PDFДокумент42 страницыAlineación - Curso - Material Apoyo PDFEduardo Jose Uribe100% (1)
- Levas y EngranajesДокумент89 страницLevas y EngranajeswellsperkeitaroОценок пока нет
- Propuesta de Mejora Continua en El Área de ProduccionДокумент41 страницаPropuesta de Mejora Continua en El Área de ProduccionElmer Arhuis Duran100% (2)
- Sistemas Incrementales y AbsolutasДокумент18 страницSistemas Incrementales y AbsolutasAdrien Leks50% (6)
- MATLAB (Rotar y Trasladar Funciones 2D y 3D - Version Mejorada)Документ52 страницыMATLAB (Rotar y Trasladar Funciones 2D y 3D - Version Mejorada)FIDEL TOMAS MONTEZA ZEVALLOS57% (14)
- Acoplamiento de TurbinaДокумент11 страницAcoplamiento de TurbinaLeo MartínezОценок пока нет
- Manual CNC Utn-2009Документ89 страницManual CNC Utn-2009marcos2122Оценок пока нет
- CNCДокумент17 страницCNCremixscitoОценок пока нет
- Ejercicios de Integrales de Línea, Superficie y VolumenОт EverandEjercicios de Integrales de Línea, Superficie y VolumenРейтинг: 4 из 5 звезд4/5 (2)
- Plan de Clase Grado Sexto Ingles Segundo Periodo 2019Документ31 страницаPlan de Clase Grado Sexto Ingles Segundo Periodo 2019Laura C Lopez100% (2)
- Examen Parcial - Semana 4 ESPSEGUNDO BLOQUE-INGLES GENERAL IV - (GRUPO B01)Документ21 страницаExamen Parcial - Semana 4 ESPSEGUNDO BLOQUE-INGLES GENERAL IV - (GRUPO B01)Andrea Vasquez100% (2)
- Mecanismos de Retorno RapidoДокумент30 страницMecanismos de Retorno RapidoLucy Varas Rojas100% (5)
- Evaluacion GP Modulo IxДокумент2 страницыEvaluacion GP Modulo IxJose Sanchez100% (5)
- 48 Vibracionesmantenimiento Industrial IIДокумент25 страниц48 Vibracionesmantenimiento Industrial IIfermemory_1Оценок пока нет
- Nomenclatura de Ejes y MovimientosДокумент9 страницNomenclatura de Ejes y MovimientosOmar6627Оценок пока нет
- CNC Tema III Sistemas CoordenadosДокумент42 страницыCNC Tema III Sistemas CoordenadosCarlos NaranjoОценок пока нет
- Clase Introducción A La Programción en CNCДокумент28 страницClase Introducción A La Programción en CNCJose Carlos RivaltaОценок пока нет
- Diapositiva Mecanizado TornoДокумент26 страницDiapositiva Mecanizado TornoJorge RaicevichОценок пока нет
- Curso Programación Fanuc para Puma 240Документ40 страницCurso Programación Fanuc para Puma 240Carlos CasОценок пока нет
- Sistema de Coordenadas y Control de MovimientosДокумент2 страницыSistema de Coordenadas y Control de MovimientosJorge Canales100% (1)
- Normas Icontec Relacionadas Con Control Numerico de MáquinasДокумент14 страницNormas Icontec Relacionadas Con Control Numerico de MáquinasDanilo Ariza GtzОценок пока нет
- Análisis de posición y coordenadas de mecanismosДокумент51 страницаAnálisis de posición y coordenadas de mecanismosBerthold VillavicencioОценок пока нет
- Capitulo Tecnicas de Analisis Parte2Документ46 страницCapitulo Tecnicas de Analisis Parte2joseОценок пока нет
- Calibracion de CNC1Документ7 страницCalibracion de CNC1Eduardo PH0% (1)
- Análisis de Velocidad y Aceleración del Mecanismo Manivela Biela CorrederaДокумент4 страницыAnálisis de Velocidad y Aceleración del Mecanismo Manivela Biela CorrederaasdfgОценок пока нет
- Mecanismos de Retorno RapidoДокумент8 страницMecanismos de Retorno RapidoTony SanchezОценок пока нет
- Lab N°3. Mtto PredictivoДокумент24 страницыLab N°3. Mtto PredictivoFrank Cesar Tello CastilloОценок пока нет
- Componentes de Las MHCNДокумент40 страницComponentes de Las MHCNEnriSoCОценок пока нет
- Mecanismos de Retorno RapidoДокумент29 страницMecanismos de Retorno RapidoIsabela Agamez SarmientoОценок пока нет
- Arbol de LevasДокумент10 страницArbol de LevasRonny Portillo100% (1)
- Componentes de Las MHCNДокумент7 страницComponentes de Las MHCNJenny Gabriela Vallejo ZuritaОценок пока нет
- MHCNCДокумент16 страницMHCNCenainmhОценок пока нет
- Alineación de acoplamientos: causas, métodos y correcciónДокумент19 страницAlineación de acoplamientos: causas, métodos y correcciónfaustoОценок пока нет
- Ingenieria Del Vehiculo I Lab 5 PDFДокумент20 страницIngenieria Del Vehiculo I Lab 5 PDFLuis AkerОценок пока нет
- Práctica 4Документ25 страницPráctica 4Carlos David RualesОценок пока нет
- SINTESISДокумент6 страницSINTESISEdgar LopezОценок пока нет
- Ejercicios MecánicaДокумент12 страницEjercicios MecánicaAlba PascualОценок пока нет
- Investigacion de Levas - JoseДокумент9 страницInvestigacion de Levas - JoseJORGE ANTONIO PEREZ ROBLESОценок пока нет
- Herramientas MatematicasДокумент8 страницHerramientas MatematicasRichard MuñozОценок пока нет
- Balanceo de Motores Estático y DinámicoДокумент8 страницBalanceo de Motores Estático y DinámicoGabriel Aguilar PerezОценок пока нет
- Cabezal DivisorДокумент17 страницCabezal DivisormariaОценок пока нет
- Unidad 1 MecanismosДокумент14 страницUnidad 1 MecanismosCharly CocoletziОценок пока нет
- Analisis de Mecanismo de Cepilladora TerminadoДокумент8 страницAnalisis de Mecanismo de Cepilladora TerminadoOmar Andrés GarcíaОценок пока нет
- Prog Maq-H CNC Parte1Документ23 страницыProg Maq-H CNC Parte1Francisco Mones RuizОценок пока нет
- Guia Manufactura 3Документ9 страницGuia Manufactura 3elimarloyoОценок пока нет
- Capítulo - 03 - Levas - ShigleyДокумент12 страницCapítulo - 03 - Levas - ShigleyJonathanRVОценок пока нет
- Banco de Balanceo Dinamico 1Документ10 страницBanco de Balanceo Dinamico 1Ronald BalderramaОценок пока нет
- Cinemática de Máquinas-HerramientaДокумент26 страницCinemática de Máquinas-HerramientaJose Manuel Inoa Vega33% (3)
- Movimiento giroscópicoДокумент6 страницMovimiento giroscópicoDennis Minchán ChОценок пока нет
- 05 CPI Componentes Que Integran Un Sistema de Control NuméricoДокумент13 страниц05 CPI Componentes Que Integran Un Sistema de Control NuméricoFrancisco Luevanos MorenoОценок пока нет
- Nivel de IngenieroДокумент10 страницNivel de IngenieroBryan Manuel Zevallos SuarezОценок пока нет
- Modulo de ProgramacionДокумент78 страницModulo de ProgramacionRaul Ramirez ResendizОценок пока нет
- Fundamentos de Programación CNCДокумент35 страницFundamentos de Programación CNCmaxcoronel280% (2)
- Tarea 06 y 07Документ37 страницTarea 06 y 07Michael ThebbesiОценок пока нет
- ALINEACIONДокумент20 страницALINEACIONALAAN89Оценок пока нет
- Diseño de Circuitos NeumáticosДокумент5 страницDiseño de Circuitos NeumáticosSalvador de la PeñaОценок пока нет
- LevasДокумент33 страницыLevasFrancisco Javier Orellana ContrerasОценок пока нет
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsОт EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsОценок пока нет
- Ensayo Composicion FotograficaДокумент2 страницыEnsayo Composicion FotograficaEsteban ProcelОценок пока нет
- PRACTICA KR-20 Ejemplo ConocimientosДокумент9 страницPRACTICA KR-20 Ejemplo ConocimientosMoises QRОценок пока нет
- 01 Actividad EconómicaДокумент8 страниц01 Actividad EconómicaVioleta Gómez RosilloОценок пока нет
- Introdduccion Al Procesamiento MineralesДокумент7 страницIntrodduccion Al Procesamiento Mineralesleolam_06Оценок пока нет
- Preguntas SISGEDOДокумент6 страницPreguntas SISGEDOKevyn Davila BurgaОценок пока нет
- Taller de Manualidades en NavidadДокумент3 страницыTaller de Manualidades en NavidadAlejandra Ugarte MuñozОценок пока нет
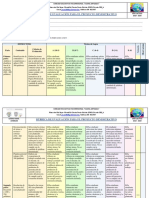
- Rúbrica de evaluación para proyecto demostrativoДокумент5 страницRúbrica de evaluación para proyecto demostrativoAndrewAndy100% (2)
- Cuadernillo-20220423 154731FrU7Документ4 страницыCuadernillo-20220423 154731FrU7JHON DAVID CCOSI CAHUIОценок пока нет
- IS023-I-Navarro Chacon, MiluskaДокумент14 страницIS023-I-Navarro Chacon, MiluskaMiluska NavarroОценок пока нет
- Reportaje de PlantasДокумент3 страницыReportaje de PlantasPrince Tatiana Trujillo AquinoОценок пока нет
- La Procrastinación y La MemoriaДокумент2 страницыLa Procrastinación y La MemoriaKamila Villamarín González100% (2)
- Pa F.A.G 2bachДокумент34 страницыPa F.A.G 2bachfernandoОценок пока нет
- Sistema EléctricoДокумент14 страницSistema EléctricoCRISTHIAN DIAZ GAMBOAОценок пока нет
- Examen Final Mn163 2020 II SolucionarioДокумент4 страницыExamen Final Mn163 2020 II SolucionarioHarrynson Luis Oscuvilca EgoavilОценок пока нет
- It MaissДокумент8 страницIt MaisslabavillaОценок пока нет
- Distribución física nacional de ColantaДокумент18 страницDistribución física nacional de ColantaEdison PerezОценок пока нет
- DeshumidificaciónДокумент4 страницыDeshumidificaciónBrayan NovoaОценок пока нет
- Taller ABPДокумент10 страницTaller ABPCaesar AlexanderОценок пока нет
- Ejercicio Uso de La V, BДокумент4 страницыEjercicio Uso de La V, BAbraham ZavalaОценок пока нет
- Nuestro Libro (Real) de Proyectos 3ergradoДокумент321 страницаNuestro Libro (Real) de Proyectos 3ergradoAlma Velia Lora ÁngelesОценок пока нет
- Turbo CargadoresДокумент5 страницTurbo CargadoresJavierОценок пока нет
- Comunidad de Propietarios: Ley de Propiedad HorizontalДокумент16 страницComunidad de Propietarios: Ley de Propiedad HorizontalAngel Sanchez GarciaОценок пока нет
- DirectvДокумент16 страницDirectvSaimon Cesar Ballesteros CorreaОценок пока нет
- Tema-8 Equilibrio QuimicoДокумент18 страницTema-8 Equilibrio Quimico정수상Оценок пока нет
- CV Sara JassoДокумент1 страницаCV Sara JassoBello ClauОценок пока нет