Вам также может понравиться
- Laboratório 1 - Análise e Controle de Sistemas MecânicosДокумент18 страницLaboratório 1 - Análise e Controle de Sistemas Mecânicosjmaj jmajОценок пока нет
- COQ791 Lista 2 OrsiniДокумент8 страницCOQ791 Lista 2 OrsiniorsinibenchimolОценок пока нет
- Projeto de Sistemas de Controle - Espaço de Estados Malha FechadaДокумент22 страницыProjeto de Sistemas de Controle - Espaço de Estados Malha FechadaDorival OliveiraОценок пока нет
- RELATÓRIO 2 - Método de Identificação Dos Mínimos QuadradosДокумент7 страницRELATÓRIO 2 - Método de Identificação Dos Mínimos QuadradosranieresystemОценок пока нет
- Lista de ExerciciosДокумент6 страницLista de ExerciciosAline AraujoОценок пока нет
- Trabalho 1 - Controle 2Документ12 страницTrabalho 1 - Controle 2Elidiany VianaОценок пока нет
- Lista de Exercícios de SimulaçãoДокумент56 страницLista de Exercícios de SimulaçãoNielsen FonsecaОценок пока нет
- Lista de Exercícios de SimulaçãoДокумент56 страницLista de Exercícios de SimulaçãoNielsen FonsecaОценок пока нет
- Apostila - Modelagem de Sistemas Fisicos - Parte 04Документ8 страницApostila - Modelagem de Sistemas Fisicos - Parte 04Anderson KumazawaОценок пока нет
- Lista 2-Edgardo CastroДокумент22 страницыLista 2-Edgardo CastroEdgardo Rafael Castro PachecoОценок пока нет
- Prova3 Partev1Документ11 страницProva3 Partev1matheus AlmeidaОценок пока нет
- 2o Trabalho Controle, Amaro e Pedro FazzaДокумент13 страниц2o Trabalho Controle, Amaro e Pedro FazzaAmaro Da Silva Lopes JúniorОценок пока нет
- Acetatos Passagem Grafcet LadderДокумент11 страницAcetatos Passagem Grafcet LadderAntonio MarinhoОценок пока нет
- Lista 1Документ3 страницыLista 1Felipe BerettaОценок пока нет
- Exercícios PI Ideal Atraso FaseДокумент2 страницыExercícios PI Ideal Atraso FaseDaniela SoaresОценок пока нет
- 1 - Laboratório Sistemas Lineares - EstabilidadeДокумент9 страниц1 - Laboratório Sistemas Lineares - Estabilidadejmaj jmajОценок пока нет
- Lista 1Документ2 страницыLista 1rafa_buosiОценок пока нет
- Controle Vetorial, Máquina De Indução E Métodos NuméricosОт EverandControle Vetorial, Máquina De Indução E Métodos NuméricosОценок пока нет
- Algoritmo VagalumesДокумент4 страницыAlgoritmo VagalumesBruno RibeiroОценок пока нет
- Aula 16 Pratica 03 ESTA008 17 2Q21 v1Документ4 страницыAula 16 Pratica 03 ESTA008 17 2Q21 v1caОценок пока нет
- Trabalho 2 - Ganho CríticoДокумент4 страницыTrabalho 2 - Ganho CríticoMeury BiazattiОценок пока нет
- Lab. Controle 2 - Hector FelixДокумент28 страницLab. Controle 2 - Hector FelixHector FelixОценок пока нет
- Projeto Final Controle de Motor DCДокумент11 страницProjeto Final Controle de Motor DCThyago FreitasОценок пока нет
- Controle e Servomecanismos I Aula 11 01 2023Документ10 страницControle e Servomecanismos I Aula 11 01 2023Thiago de LimaОценок пока нет
- Aula 14 Aula Pratica 02 ESTA008 17 v1Документ8 страницAula 14 Aula Pratica 02 ESTA008 17 v1caОценок пока нет
- (Teoria de Controle) Projeto Sintonia de Controlador PIDДокумент27 страниц(Teoria de Controle) Projeto Sintonia de Controlador PIDLucasMoreiradeLacerdaОценок пока нет
- Lista Ajuste LinearДокумент18 страницLista Ajuste LinearJonas CostaОценок пока нет
- Análise Da Resposta Transitória de Um Sistema de Primeira OrdemДокумент12 страницAnálise Da Resposta Transitória de Um Sistema de Primeira OrdemGustavoОценок пока нет
- Gabarito Lista de Controle ResolvidaДокумент10 страницGabarito Lista de Controle ResolvidaSalatyel FellipeОценок пока нет
- Lista de Exercícios - Métodos Numéricos 1 PDFДокумент9 страницLista de Exercícios - Métodos Numéricos 1 PDFonesimo.ximenesОценок пока нет
- Lista 1Документ4 страницыLista 1maurilio paiaoОценок пока нет
- Relatório - Projeto 1 - Root LocusДокумент27 страницRelatório - Projeto 1 - Root LocusLEONARDO GOMES DA SILVAОценок пока нет
- Lab 4 SCMДокумент11 страницLab 4 SCMCaetano PellegrinОценок пока нет
- Questão 1) Um Tanque de Compensação Simples Com Uma Válvula Fixa Na Linha de Saída ÉДокумент3 страницыQuestão 1) Um Tanque de Compensação Simples Com Uma Válvula Fixa Na Linha de Saída ÉLuiza L. Dos AnjosОценок пока нет
- Amita Muralikrishna ST6Документ4 страницыAmita Muralikrishna ST6Marcos Paulo Dos SantosОценок пока нет
- Atividade2-Oficina UFMGДокумент5 страницAtividade2-Oficina UFMGLeticia VitoriaОценок пока нет
- PID - Sistemas de ControleДокумент19 страницPID - Sistemas de ControleMICHELLY CARVALHO DA SILVAОценок пока нет
- Clii02 12Документ5 страницClii02 12Maycon ThaumaturgoОценок пока нет
- Prova 1 SCI 2021 1SДокумент7 страницProva 1 SCI 2021 1SROBERTH HENRIQUE GUIMARAES DOS SANTOSОценок пока нет
- 18 - Anexo BДокумент4 страницы18 - Anexo BJoão SilvaОценок пока нет
- PSD - Série Cap.7Документ10 страницPSD - Série Cap.7Tobias MoratoОценок пока нет
- 1 - Laboratório Sistemas Lineares - Estabilidade - ErrosДокумент11 страниц1 - Laboratório Sistemas Lineares - Estabilidade - ErrosMarcela CaixetaОценок пока нет
- Lista2 SSIE9Документ3 страницыLista2 SSIE9AliciaОценок пока нет
- Relatório 5 - Apçlicação de Sistemas Reguladores Quadráticos ÓtimoДокумент6 страницRelatório 5 - Apçlicação de Sistemas Reguladores Quadráticos ÓtimoClaudio Albués AlvesОценок пока нет
- LCON.2 - Análise de Respostas de Sistemas Dinâmicos - Circuitos RC e RLCДокумент11 страницLCON.2 - Análise de Respostas de Sistemas Dinâmicos - Circuitos RC e RLCCesar Augusto Mendes Cordeiro da SilvaОценок пока нет
- 22.11.06 - EA268 - 22B - PSD - Série Cap.7 - PFFIR - (3h00min) - ALUNOS E1 A E5Документ10 страниц22.11.06 - EA268 - 22B - PSD - Série Cap.7 - PFFIR - (3h00min) - ALUNOS E1 A E5Tobias MoratoОценок пока нет
- Projeto Controle Ii Dionei ArcaroДокумент10 страницProjeto Controle Ii Dionei ArcaroDionei ArcaroОценок пока нет
- Compensadores de ControleДокумент14 страницCompensadores de ControleDorival OliveiraОценок пока нет
- Metodo Dos Volumes FinitosДокумент19 страницMetodo Dos Volumes FinitosPedro JoãoОценок пока нет
- Relatório 4Документ8 страницRelatório 4ADRIANOОценок пока нет
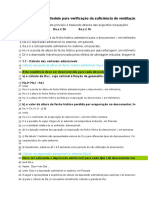
- Ventilação EP1 VSanitДокумент24 страницыVentilação EP1 VSanitAntonio Ulisses de AlvarengaОценок пока нет
- 1 - Exercicios Filtros AnalógicosДокумент7 страниц1 - Exercicios Filtros AnalógicosBruno CapareliОценок пока нет
- Controle1 - Técnicas de Resposta em FrequênciaДокумент32 страницыControle1 - Técnicas de Resposta em FrequênciatressoengenhariaОценок пока нет
- Sistemas de Controle II - CompensadoresДокумент128 страницSistemas de Controle II - CompensadoresGiovanna MisquitaОценок пока нет
- Questão 4.71 - Incropera 6 EdiçãoДокумент18 страницQuestão 4.71 - Incropera 6 EdiçãoOlga Pinheiro GarciaОценок пока нет
- Projeto de Controlador para Cruise ControlДокумент11 страницProjeto de Controlador para Cruise ControlTiagoTercianoОценок пока нет
- Trabalho 1 AtualizadoДокумент13 страницTrabalho 1 AtualizadoMaria PelissonОценок пока нет
- Como Tratar Diagrama de BodeДокумент16 страницComo Tratar Diagrama de BodeDorival OliveiraОценок пока нет
- Experimento 04 AM Parte 1Документ7 страницExperimento 04 AM Parte 1Lucas OliveiraОценок пока нет
- Aula 16 - Compensadores e Lugar Das RaizesДокумент5 страницAula 16 - Compensadores e Lugar Das RaizesBruno De MattosОценок пока нет
- Manual Sepam Series80 Operation BRДокумент152 страницыManual Sepam Series80 Operation BRJairo SilvaОценок пока нет
- Lei de Gauss e Suas AplicaçõesДокумент78 страницLei de Gauss e Suas AplicaçõesThiago FonsecaОценок пока нет
- O CIÚME - Alain Robbe-GrilletДокумент64 страницыO CIÚME - Alain Robbe-GrilletCristiane VieiraОценок пока нет
- Estrutura e Arquitetura Aco e Madeira ST PDFДокумент16 страницEstrutura e Arquitetura Aco e Madeira ST PDFLuciano SennaОценок пока нет
- Relatório ChumbadoresДокумент21 страницаRelatório ChumbadoresLuiz Adolfo de CarvalhoОценок пока нет
- Diretriz Sinat N° 011 - PBQPH - d3125Документ42 страницыDiretriz Sinat N° 011 - PBQPH - d3125Consuêlo Siqueira100% (1)
- Aef11 Ques Aulalab 2Документ2 страницыAef11 Ques Aulalab 2Narcisa Alexandra Filipe100% (1)
- FenoisДокумент3 страницыFenoisagnaldolimaОценок пока нет
- DR Ihaleakala Hew Lem HoponoponoДокумент8 страницDR Ihaleakala Hew Lem HoponoponoNesher Sodh SerphenthОценок пока нет
- Engenharia Quimica Versao AДокумент28 страницEngenharia Quimica Versao AWiltemberg Lima100% (1)
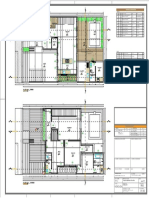
- Projeto Josyvania 01 PDFДокумент1 страницаProjeto Josyvania 01 PDFJoão Pereira de SouzaОценок пока нет
- Movimento Retilineo Uniformemente VariadoДокумент13 страницMovimento Retilineo Uniformemente VariadoDimas MatosОценок пока нет
- Montagem e Alinhamento de MáquinasДокумент92 страницыMontagem e Alinhamento de MáquinasJoziel Saxophonist100% (2)
- Atividade 2 MECÂNICA DOS FLUIDOSДокумент6 страницAtividade 2 MECÂNICA DOS FLUIDOSJoao Baltazar Batista Dos SantosОценок пока нет
- Relatorio ContrasteДокумент9 страницRelatorio ContrasteEmerson SantosОценок пока нет
- OT-01 - Sistema MRT PDFДокумент146 страницOT-01 - Sistema MRT PDFMan Man100% (2)
- C1260 Circuito Do Sensor de Direção HYUNDAIДокумент3 страницыC1260 Circuito Do Sensor de Direção HYUNDAIWELIGTON GOMESОценок пока нет
- T41965 PDFДокумент69 страницT41965 PDFosvaldo oliveira100% (1)
- Proposta de Exame FinalДокумент14 страницProposta de Exame FinalPGОценок пока нет
- Clive Cussler - Choque MortalДокумент368 страницClive Cussler - Choque Mortalc996326Оценок пока нет
- Gabarito Comentado Engenharia Química (Qui) - Versão AДокумент16 страницGabarito Comentado Engenharia Química (Qui) - Versão AMaisa Paraguassu100% (1)
- Pi 7 Ficha PDFДокумент5 страницPi 7 Ficha PDFElisabete RosaОценок пока нет
- 9 26 Proceso de Avaliacao de Um Sistema de Deteccao de Vazamento FinalДокумент5 страниц9 26 Proceso de Avaliacao de Um Sistema de Deteccao de Vazamento FinalHélder PascoalОценок пока нет
- Matriz 9ºano - 2º TesteДокумент2 страницыMatriz 9ºano - 2º Testesofia wuОценок пока нет
- Teste2 CC FQ Nov.2020Документ2 страницыTeste2 CC FQ Nov.2020Sara Pereira100% (1)
- Genograma e Ecomapa PDFДокумент38 страницGenograma e Ecomapa PDFSendhy QuirinoОценок пока нет
- Lei de CoulombДокумент5 страницLei de CoulombAdryana SousaОценок пока нет
- 4 - Flexão e CisalhamentoДокумент9 страниц4 - Flexão e CisalhamentoAlexandro TikkanenОценок пока нет
- Metalurgia Do CobreДокумент39 страницMetalurgia Do CobreSteven Dzioba50% (2)
- 01 Aula o Planeta Terra e Suas OrigensДокумент6 страниц01 Aula o Planeta Terra e Suas OrigensrenatoОценок пока нет