Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Ieee C57.125Документ11 страницIeee C57.125suresh kumarОценок пока нет
- Engine PDFДокумент254 страницыEngine PDFtipo333194% (18)
- 9098i Circuit Diagrams Overlays Issue 2Документ321 страница9098i Circuit Diagrams Overlays Issue 2Robert Morris100% (1)
- Error-Correcting Codes For Automatic Control: IEEE Transactions On Information Theory August 2009Документ15 страницError-Correcting Codes For Automatic Control: IEEE Transactions On Information Theory August 2009Muhammad Royyan ZahirОценок пока нет
- J. de Vries Indonesian Abbreviations and Acronyms: This PDF-file Was Downloaded From HTTP://WWW - Kitlv-Journals - NLДокумент10 страницJ. de Vries Indonesian Abbreviations and Acronyms: This PDF-file Was Downloaded From HTTP://WWW - Kitlv-Journals - NLMuhammad Royyan ZahirОценок пока нет
- User Manual: Zenith W/carrier AdapterДокумент37 страницUser Manual: Zenith W/carrier AdapterMuhammad Royyan ZahirОценок пока нет
- Scientific Deception of New Athiest - Mohammed HijabДокумент34 страницыScientific Deception of New Athiest - Mohammed HijabOmarОценок пока нет
- Young1972 PDFДокумент20 страницYoung1972 PDFRodrigopn10Оценок пока нет
- Response To Reviewers' Comments For Manuscript IEEE L-CSS 20-0350, Version 1Документ13 страницResponse To Reviewers' Comments For Manuscript IEEE L-CSS 20-0350, Version 1Muhammad Royyan ZahirОценок пока нет
- ELEC-E3520 Digital Microelectronics I: Marko KosunenДокумент38 страницELEC-E3520 Digital Microelectronics I: Marko KosunenMuhammad Royyan ZahirОценок пока нет
- A Study of LoRa - Long Range and Low Power Networks For The Internet of ThingsДокумент19 страницA Study of LoRa - Long Range and Low Power Networks For The Internet of ThingsMuhammad Royyan ZahirОценок пока нет
- GAN Solution Session 2021Документ44 страницыGAN Solution Session 2021Muhammad Royyan ZahirОценок пока нет
- PaperДокумент5 страницPaperMuhammad Royyan ZahirОценок пока нет
- POSTECH Graduate Admissions Guide For International Students (Fall 2015 & Spring 2016)Документ14 страницPOSTECH Graduate Admissions Guide For International Students (Fall 2015 & Spring 2016)Muhammad Royyan ZahirОценок пока нет
- SopДокумент2 страницыSopMuhammad Royyan ZahirОценок пока нет
- What Is Recount? A. Definition of RecountДокумент6 страницWhat Is Recount? A. Definition of RecountMuhammad Royyan ZahirОценок пока нет
- AC-AC Converter: - Muhammad Royyan - Nandika Wibowo - Rio Pamungkas - M. Jundi Arrofi - Aris AndistaДокумент14 страницAC-AC Converter: - Muhammad Royyan - Nandika Wibowo - Rio Pamungkas - M. Jundi Arrofi - Aris AndistaMuhammad Royyan ZahirОценок пока нет
- Ticket ConfirmationДокумент2 страницыTicket ConfirmationMuhammad Royyan ZahirОценок пока нет
- Anh Fault Estimation Scheme of Wireless Networked Control Systems For Industrial Real-Time ApplicationsДокумент39 страницAnh Fault Estimation Scheme of Wireless Networked Control Systems For Industrial Real-Time ApplicationsMuhammad Royyan ZahirОценок пока нет
- Biologi Pengamatan Preparat KeringДокумент4 страницыBiologi Pengamatan Preparat KeringMuhammad Royyan ZahirОценок пока нет
- Python CommandsДокумент3 страницыPython Commandsempty_Оценок пока нет
- Python BasicsДокумент20 страницPython BasicsMuhammad Royyan ZahirОценок пока нет
- Page - 1: This Is The Header of The Included PDF DocumentДокумент30 страницPage - 1: This Is The Header of The Included PDF DocumentMuhammad Royyan ZahirОценок пока нет
- To Whom It May ConcernДокумент1 страницаTo Whom It May ConcernMuhammad Royyan ZahirОценок пока нет
- King Abdullah University of Science and Technology - Muhammad Royyan ZahirДокумент2 страницыKing Abdullah University of Science and Technology - Muhammad Royyan ZahirMuhammad Royyan ZahirОценок пока нет
- AnnintroДокумент31 страницаAnnintroSyed Beeban BashaОценок пока нет
- Lab Complex enДокумент2 страницыLab Complex enMuhammad Royyan ZahirОценок пока нет
- VHDL CookbookДокумент111 страницVHDL Cookbookcoolboyz81990Оценок пока нет
- Asm Editor enДокумент3 страницыAsm Editor enMuhammad Royyan ZahirОценок пока нет
- Muhammad Royyan: ZahirДокумент2 страницыMuhammad Royyan: ZahirMuhammad Royyan ZahirОценок пока нет
- A Robotic Arm Design For Stroke PatientsДокумент4 страницыA Robotic Arm Design For Stroke PatientsMuhammad Royyan ZahirОценок пока нет
- Wednesday, September 18, 2013 11:30 AM: General Page 1Документ4 страницыWednesday, September 18, 2013 11:30 AM: General Page 1Muhammad Royyan ZahirОценок пока нет
- NS3000 Modem BD 2Документ2 страницыNS3000 Modem BD 2Andy ChanОценок пока нет
- Recent Trends in Retardation FilmsДокумент10 страницRecent Trends in Retardation FilmsJeevan JalliОценок пока нет
- A History of The Invention of The Transistor and Where It Will Lead UsДокумент9 страницA History of The Invention of The Transistor and Where It Will Lead UstthenryОценок пока нет
- Protocol Efficiency and HDLCДокумент31 страницаProtocol Efficiency and HDLCBijoy04Оценок пока нет
- Isp321 2X PDFДокумент3 страницыIsp321 2X PDFBoroDragovicОценок пока нет
- Eee-Vi-Switchgear & Protection (10ee62) - Notes PDFДокумент92 страницыEee-Vi-Switchgear & Protection (10ee62) - Notes PDFRK KОценок пока нет
- Linux Input SubsystemДокумент139 страницLinux Input SubsystemDilipОценок пока нет
- FS2CREW 737 NGX Reboot Sop 2 Tutorial ButtonДокумент33 страницыFS2CREW 737 NGX Reboot Sop 2 Tutorial Buttonbibou boubiОценок пока нет
- Aire Acondicionado ASY12FSBCWДокумент2 страницыAire Acondicionado ASY12FSBCWJano NymusОценок пока нет
- Electronic Devices and Circuit Theory 11th Edition by Boylestad Nashelsky Test BankДокумент9 страницElectronic Devices and Circuit Theory 11th Edition by Boylestad Nashelsky Test BankgghtОценок пока нет
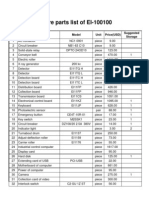
- Ei 100100Документ2 страницыEi 100100Tabassum BanuОценок пока нет
- Transmission and Distribution For Electrical Engineering - Electricalnotes4uДокумент10 страницTransmission and Distribution For Electrical Engineering - Electricalnotes4uNitin Maurya100% (1)
- Electrical Position Indicators For Quarter Turn Actuators: LS SeriesДокумент6 страницElectrical Position Indicators For Quarter Turn Actuators: LS SeriesSanjay MaheshОценок пока нет
- Sis & SilДокумент65 страницSis & SilGecОценок пока нет
- Indesit Idce745euДокумент13 страницIndesit Idce745euMилош ЛукићОценок пока нет
- LM117 Voltage RegulatorДокумент26 страницLM117 Voltage Regulatore_bahamondesОценок пока нет
- Week 11 Lab - Faradays LawДокумент13 страницWeek 11 Lab - Faradays LawRowen PratherОценок пока нет
- Electronics Washing Machine ControlДокумент4 страницыElectronics Washing Machine ControlMohd ShukriОценок пока нет
- Bob Blue2 Ring TesterДокумент4 страницыBob Blue2 Ring Testerbybu74Оценок пока нет
- Clamp Meters: Quick Reference GuideДокумент2 страницыClamp Meters: Quick Reference GuideRaul InzunzaОценок пока нет
- Compressor L7044GSI-7045 - 1210Документ2 страницыCompressor L7044GSI-7045 - 1210Dedy Chasan Aflah MutoharОценок пока нет
- KingtoneДокумент2 страницыKingtoneUlla WirtanenОценок пока нет
- Recurrent Surge Oscillograph (RSO) For Rotor Winding Shorts DetectionДокумент5 страницRecurrent Surge Oscillograph (RSO) For Rotor Winding Shorts Detectionmayur dhandeОценок пока нет
- Nema SB 50-2008Документ32 страницыNema SB 50-2008Irwin CastroОценок пока нет
- Ee3015 PDFДокумент1 страницаEe3015 PDFRovick TarifeОценок пока нет
- What Is A Phase SequenceДокумент5 страницWhat Is A Phase SequencedanielОценок пока нет
- IEEE Standard Requirements For Secondary Network ProtectorsДокумент56 страницIEEE Standard Requirements For Secondary Network ProtectorsMahmoud LotfyОценок пока нет