Вам также может понравиться
- InstallationGuide en Yamaha Expansion Manager en Ig v240 E0Документ5 страницInstallationGuide en Yamaha Expansion Manager en Ig v240 E0Jose MartosОценок пока нет
- PSR s670 enДокумент108 страницPSR s670 endavid19775891100% (1)
- Us 20130019216Документ62 страницыUs 20130019216david19775891Оценок пока нет
- PH.D Engg OrdinancesДокумент13 страницPH.D Engg Ordinancesdavid19775891Оценок пока нет
- Gamer! Lee Miller: Dec. 26, 1944. - H - Null-Er Des. 139,861 'Документ2 страницыGamer! Lee Miller: Dec. 26, 1944. - H - Null-Er Des. 139,861 'david19775891Оценок пока нет
- Yamaha Expansion Manager en Om v230 f0Документ25 страницYamaha Expansion Manager en Om v230 f0david19775891Оценок пока нет
- LG Aircondiotioner Catalog2015Документ20 страницLG Aircondiotioner Catalog2015david19775891Оценок пока нет
- United States Patent: Shah-HosseiniДокумент28 страницUnited States Patent: Shah-Hosseinidavid19775891Оценок пока нет
- Us 20130159882Документ35 страницUs 20130159882david19775891Оценок пока нет
- Us 8601537Документ45 страницUs 8601537david19775891Оценок пока нет
- Us 8332143Документ12 страницUs 8332143david19775891Оценок пока нет
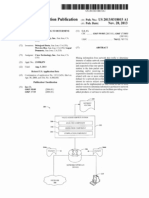
- United States: (12) Patent Application Publication (10) Pub. No.: US 2013/0013586 A1Документ13 страницUnited States: (12) Patent Application Publication (10) Pub. No.: US 2013/0013586 A1david19775891Оценок пока нет
- United States Patent: Muras Et Al. (10) Patent N0.: (45) Date of PatentДокумент11 страницUnited States Patent: Muras Et Al. (10) Patent N0.: (45) Date of Patentdavid19775891Оценок пока нет
- Us 20120245970Документ67 страницUs 20120245970david19775891Оценок пока нет
- Che-Torah Tape/10W) Po-Feng 33333333? 3% 13/5882 5152??Документ16 страницChe-Torah Tape/10W) Po-Feng 33333333? 3% 13/5882 5152??david19775891Оценок пока нет
- Us 20130218893Документ16 страницUs 20130218893david19775891Оценок пока нет
- United States Patent: (12) (10) Patent N0.: US 8,250,105 B2 Bollinger Et Al. (45) Date of Patent: Aug. 21, 2012Документ41 страницаUnited States Patent: (12) (10) Patent N0.: US 8,250,105 B2 Bollinger Et Al. (45) Date of Patent: Aug. 21, 2012david19775891Оценок пока нет
- Us 20130124440Документ30 страницUs 20130124440david19775891Оценок пока нет
- United States: (12) Patent Application Publication (10) Pub. No.: US 2013/0318015 A1Документ26 страницUnited States: (12) Patent Application Publication (10) Pub. No.: US 2013/0318015 A1david19775891Оценок пока нет
- 305 / Create Statistical Data: Test/Refine ModelДокумент32 страницы305 / Create Statistical Data: Test/Refine Modeldavid19775891Оценок пока нет
- United States: (12) Patent Application Publication (10) Pub. No.: US 2013/0311283 A1Документ28 страницUnited States: (12) Patent Application Publication (10) Pub. No.: US 2013/0311283 A1david19775891Оценок пока нет
- Us 8306997Документ15 страницUs 8306997david19775891Оценок пока нет
- United States Patent: Prahlad Et A1. (10) Patent N0.: (45) Date of PatentДокумент34 страницыUnited States Patent: Prahlad Et A1. (10) Patent N0.: (45) Date of Patentdavid19775891Оценок пока нет
- Us 8356047Документ14 страницUs 8356047david19775891Оценок пока нет
- Us 20130198093Документ25 страницUs 20130198093david19775891Оценок пока нет
- Ulllted States Patent (10) Patent N0.: US 8,315,981 B2Документ34 страницыUlllted States Patent (10) Patent N0.: US 8,315,981 B2david19775891Оценок пока нет
- Us 8280899Документ14 страницUs 8280899david19775891Оценок пока нет
- Us 20130182895Документ39 страницUs 20130182895david19775891Оценок пока нет
- European Patent Application: Method and Computer Program For Statistical and Data-Mining Processing of Large Data SetsДокумент16 страницEuropean Patent Application: Method and Computer Program For Statistical and Data-Mining Processing of Large Data Setsdavid19775891Оценок пока нет
- IND056 X 02Документ1 страницаIND056 X 02david19775891Оценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Electronics Syllabus 18-21Документ17 страницElectronics Syllabus 18-21BlessingОценок пока нет
- Mobile Detector: Text & Image by Aditya RamaneДокумент4 страницыMobile Detector: Text & Image by Aditya Ramaneanupnaskar naskarОценок пока нет
- OscillatorДокумент15 страницOscillatorGerald Labios100% (2)
- EC8491 Communication Systems - Notes 3Документ166 страницEC8491 Communication Systems - Notes 3Kaniha KОценок пока нет
- RC500 DatasheetДокумент12 страницRC500 DatasheetRaissan ChedidОценок пока нет
- Low Cost Frequency Multipliers Using Surface Mount Pin Diodes An1054Документ4 страницыLow Cost Frequency Multipliers Using Surface Mount Pin Diodes An1054Anonymous 39lpTJiОценок пока нет
- Ec6411 EC II Lab Manual 2013Документ89 страницEc6411 EC II Lab Manual 2013Karthik SingaramОценок пока нет
- BSC Electronics SyllabusДокумент35 страницBSC Electronics SyllabusSunil GuptaОценок пока нет
- Debouncing MC14490Документ13 страницDebouncing MC14490Chany ChapnikОценок пока нет
- Single Transistor Crystal Oscillator CircuitsДокумент3 страницыSingle Transistor Crystal Oscillator CircuitsNiko GlamuzinaОценок пока нет
- Tps 40057 PWPДокумент33 страницыTps 40057 PWPcatsoithahuong84Оценок пока нет
- TCL TV M35 36 Service ManualДокумент96 страницTCL TV M35 36 Service ManualRituparna Dutta Chowdhury100% (1)
- ECE Syllabus, ECE Department HSTUДокумент46 страницECE Syllabus, ECE Department HSTUIrfan NabilОценок пока нет
- TM 9 1220 239 34Документ130 страницTM 9 1220 239 34Costas Moraitis100% (1)
- EC8462-Linear Integrated Circuits Lab ManualДокумент85 страницEC8462-Linear Integrated Circuits Lab ManualArul Perumal85% (13)
- JSSSTU BE Scheme Syllabus PDFДокумент167 страницJSSSTU BE Scheme Syllabus PDFMohammed Idrees IdreesОценок пока нет
- Colpitts Oscillator: Electronic CircuitДокумент5 страницColpitts Oscillator: Electronic CircuitAntonio DiazОценок пока нет
- Multivibrator Circuits: Bistable Multivibrator (Flip-Flops) Astable Multivibrator (Clocks or Oscillators)Документ39 страницMultivibrator Circuits: Bistable Multivibrator (Flip-Flops) Astable Multivibrator (Clocks or Oscillators)সাদ ইবনে মাজОценок пока нет
- HP 201C ManualДокумент27 страницHP 201C Manualmarco,Оценок пока нет
- Ardf RXДокумент10 страницArdf RXag1tatorОценок пока нет
- Besck104c - Lesson PlanДокумент6 страницBesck104c - Lesson PlanlubnaОценок пока нет
- Measuring Power Supply Noise With The Agilent N9020A Signal AnalyzerДокумент8 страницMeasuring Power Supply Noise With The Agilent N9020A Signal AnalyzerOUYANG JOSHUAОценок пока нет
- Crystal Oscillator Circuits Krieger Matthys DesignДокумент3 страницыCrystal Oscillator Circuits Krieger Matthys DesignNasir UddinОценок пока нет
- Simple 1.5-V Boost Converter For MSP430 - Slaa105Документ7 страницSimple 1.5-V Boost Converter For MSP430 - Slaa105Daniel ZancoОценок пока нет
- Colpitts Hartley Wein Bridge OscillatorДокумент5 страницColpitts Hartley Wein Bridge OscillatorRidwanAbrarОценок пока нет
- Electronic Hobbyists Handbook Rufus Turner PDFДокумент83 страницыElectronic Hobbyists Handbook Rufus Turner PDFmrwifihifiОценок пока нет
- Tomasi PDFДокумент159 страницTomasi PDFmiel_garrido82% (11)
- Data Sheet: TDA4857PSДокумент56 страницData Sheet: TDA4857PSAnggye Adalah AnggyeОценок пока нет
- 27MHz LinksДокумент32 страницы27MHz LinksNguyễn Vĩnh ThắngОценок пока нет