Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- D4B8046FF18-Suspension Wheels SteeringДокумент469 страницD4B8046FF18-Suspension Wheels SteeringDaniel CharlesОценок пока нет
- ControlFlow GateValveДокумент37 страницControlFlow GateValveclaudio godinezОценок пока нет
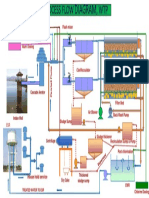
- WTP Process DiagramДокумент1 страницаWTP Process DiagramKumar AbhishekОценок пока нет
- Belt Alignment ToolДокумент2 страницыBelt Alignment ToolAshutosh VishwakarmaОценок пока нет
- CFD Analysis On Pulsating Heat Pipe To Improve Heat TransferДокумент5 страницCFD Analysis On Pulsating Heat Pipe To Improve Heat TransferijripublishersОценок пока нет
- Engine Manual of WeichaiДокумент121 страницаEngine Manual of Weichaizein zee100% (9)
- Screws Self-DrillingДокумент22 страницыScrews Self-DrillingSamra DukićОценок пока нет
- Example 2a: All-Round Fillet Weld Connection Between I Beam and Plate (Simple)Документ6 страницExample 2a: All-Round Fillet Weld Connection Between I Beam and Plate (Simple)Imran SaikatОценок пока нет
- Suspension For Electrathon VehicleДокумент55 страницSuspension For Electrathon VehicleJulius RojoОценок пока нет
- Scania CatalogДокумент68 страницScania Catalogj_hernandez_ch80% (5)
- Extensive Applications of PM Gears: FocusДокумент4 страницыExtensive Applications of PM Gears: FocusAAAHОценок пока нет
- Hydraulic Quiz 8Документ8 страницHydraulic Quiz 8Aireuxs AdjarainiОценок пока нет
- RCCДокумент101 страницаRCCJay PatelОценок пока нет
- Dokumen - Tips Stenter-DryerДокумент18 страницDokumen - Tips Stenter-DryerchuyОценок пока нет
- CEN TOOL Standard Padeyes V4 Rollup Padeye SheaveДокумент5 страницCEN TOOL Standard Padeyes V4 Rollup Padeye SheaveMarvan100% (1)
- Rycroft HT BreezeДокумент16 страницRycroft HT BreezesatejОценок пока нет
- EGF305 Topic 5-Intro To Failure Analysis PDFДокумент34 страницыEGF305 Topic 5-Intro To Failure Analysis PDFasdfasdОценок пока нет
- Treadmill 93T-04 - THH100000 - PARTS LISTДокумент19 страницTreadmill 93T-04 - THH100000 - PARTS LISTpowerliftermiloОценок пока нет
- Bellows Sealed Matering Valves BM Series (Ms-01-23) R3Документ4 страницыBellows Sealed Matering Valves BM Series (Ms-01-23) R3herysyam1980Оценок пока нет
- Datasheet (API 610 - 1 Page)Документ8 страницDatasheet (API 610 - 1 Page)Rudin Fahrudin RahmanОценок пока нет
- Den Co Close Control Product GuideДокумент40 страницDen Co Close Control Product GuideJarwantoОценок пока нет
- College of Engineering Process Control Lab.: Basrah UniversityДокумент11 страницCollege of Engineering Process Control Lab.: Basrah UniversityhanaОценок пока нет
- Syvecs LTD: Lamborghini LP520Документ11 страницSyvecs LTD: Lamborghini LP520RajibОценок пока нет
- Integral Relation For A Control Volume (Part 1)Документ15 страницIntegral Relation For A Control Volume (Part 1)Muhammad Amni FitriОценок пока нет
- NEW NEW: Silent Diesel Generating SetsДокумент2 страницыNEW NEW: Silent Diesel Generating SetsMladen MarićОценок пока нет
- CadДокумент15 страницCadBikila JemalОценок пока нет
- Design Standards and SpecificationsДокумент47 страницDesign Standards and Specificationsabhi0912Оценок пока нет
- Oxygen Cylinder GuidanceДокумент1 страницаOxygen Cylinder GuidanceDarapu PrasanthiОценок пока нет
- Mission Centrifugal PumpsДокумент60 страницMission Centrifugal PumpsWell Site Ranger100% (2)
- CAESAR II Expansion JointsДокумент26 страницCAESAR II Expansion Jointskamal_md100% (4)