Вам также может понравиться
- Currículum Vitae - MarvinДокумент2 страницыCurrículum Vitae - MarvinMarvin ThomasCsОценок пока нет
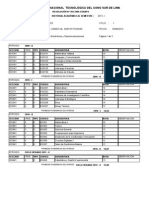
- Record AcademicoДокумент3 страницыRecord AcademicoMarvin ThomasCsОценок пока нет
- Informe Sobre La Reunión de PadresДокумент1 страницаInforme Sobre La Reunión de PadresMarvin ThomasCsОценок пока нет
- w1 A No Se Que EsДокумент1 страницаw1 A No Se Que EsMarvin ThomasCsОценок пока нет
- Ficha MatrículaДокумент1 страницаFicha MatrículaMarvin ThomasCsОценок пока нет
- Muestra 4Документ38 страницMuestra 4Marvin ThomasCs100% (4)
- Conceptos Básicos AdmónFull 11-05-15 OKДокумент11 страницConceptos Básicos AdmónFull 11-05-15 OKAnthony Huaman BerruОценок пока нет
- ImitarДокумент4 страницыImitarMarvin ThomasCsОценок пока нет
- Concepto de Plc.Документ2 страницыConcepto de Plc.Marvin ThomasCsОценок пока нет
- Currículum Vitae - MarvinДокумент2 страницыCurrículum Vitae - MarvinMarvin ThomasCsОценок пока нет
- Pregunta de Diseño - Electronicos 1 - SavantДокумент2 страницыPregunta de Diseño - Electronicos 1 - SavantMarvin ThomasCsОценок пока нет
- Declaraciones de Propósito-LiderazgoДокумент2 страницыDeclaraciones de Propósito-LiderazgoMarvin ThomasCsОценок пока нет
- Reporte Notas 1Документ3 страницыReporte Notas 1Marvin ThomasCsОценок пока нет
- Resumen 2Документ5 страницResumen 2Marvin ThomasCsОценок пока нет
- Horario 2013 IДокумент1 страницаHorario 2013 IMarvin ThomasCsОценок пока нет
- PP2014Документ3 страницыPP2014Marvin ThomasCsОценок пока нет
- Horario 2013 IДокумент1 страницаHorario 2013 IMarvin ThomasCsОценок пока нет
- Horario 2013 IДокумент1 страницаHorario 2013 IMarvin ThomasCsОценок пока нет
- Lenguaje VHDL GenerañДокумент17 страницLenguaje VHDL GenerañMarvin ThomasCsОценок пока нет
- Computadora PersonalДокумент52 страницыComputadora PersonalMarvin ThomasCsОценок пока нет
- Computadora PersonalДокумент52 страницыComputadora PersonalMarvin ThomasCsОценок пока нет
- CurriculumДокумент2 страницыCurriculumMarvin ThomasCsОценок пока нет
- Ejercicios de Producción y Costos1Документ2 страницыEjercicios de Producción y Costos1Marvin ThomasCsОценок пока нет
- 4ta Practica NotasДокумент2 страницы4ta Practica NotasMarvin ThomasCsОценок пока нет
- Caratula WhiteДокумент2 страницыCaratula WhiteMarvin ThomasCsОценок пока нет
- CurriculumДокумент2 страницыCurriculumMarvin ThomasCsОценок пока нет
- Tercio Superior 2011-IДокумент10 страницTercio Superior 2011-IMarvin ThomasCsОценок пока нет
- Encuesta TerminadaДокумент1 страницаEncuesta TerminadaMarvin ThomasCsОценок пока нет
- Silabo IcicloДокумент39 страницSilabo IcicloMarvin ThomasCsОценок пока нет
- Felipe de Jesús Sánchez Villanueva: AlumnoДокумент6 страницFelipe de Jesús Sánchez Villanueva: AlumnosergioОценок пока нет
- Sectarismo Un Problema de Salud PublicaДокумент110 страницSectarismo Un Problema de Salud PublicaAnillo de Información sobre Sectas100% (6)
- ECATEPEC DE MORELOS - Meneses - Hernandez - SalgadoДокумент256 страницECATEPEC DE MORELOS - Meneses - Hernandez - Salgadoanapaula1978Оценок пока нет
- Influencia de Las Emociones en El Rendimeinto AcademicoДокумент12 страницInfluencia de Las Emociones en El Rendimeinto Academicodaniela tejedor morilloОценок пока нет
- Duracion Espacio-Temporal de Las Culturas DesarrolladasДокумент8 страницDuracion Espacio-Temporal de Las Culturas Desarrolladas5723110306Оценок пока нет
- ROMANTICISMOДокумент2 страницыROMANTICISMOJhordan Benites Sanchez0% (1)
- Medidas para Aplicar en El AulaДокумент11 страницMedidas para Aplicar en El AulaAle RodriguezОценок пока нет
- Resultados Oficiales - Imagen Institucional - Yo Soy de La Pedro - Radio UniversitariaДокумент337 страницResultados Oficiales - Imagen Institucional - Yo Soy de La Pedro - Radio UniversitariaGuillermo Santisteban Guerrero0% (1)
- Atahualpa Fernández Alburu: Fundamentos Científicos de La EquinoterapiaДокумент10 страницAtahualpa Fernández Alburu: Fundamentos Científicos de La EquinoterapiaAtahualpa Fernández Arbulú100% (1)
- Proyecto Atencion Prevencion Desastres EnsnДокумент18 страницProyecto Atencion Prevencion Desastres EnsnAuris GalavОценок пока нет
- EE - TT Mejoramiento SSHH CHANAVAYITA 16.09.2015Документ7 страницEE - TT Mejoramiento SSHH CHANAVAYITA 16.09.2015phillipe quilhotОценок пока нет
- Estrategias Enseñanza InfusionadaДокумент8 страницEstrategias Enseñanza InfusionadaNallely SalcidoОценок пока нет
- Guia 1 Biologia Nocturna PrimariaДокумент3 страницыGuia 1 Biologia Nocturna PrimariaEmelis JimenezОценок пока нет
- Guía Especial Concurso 128013Документ5 страницGuía Especial Concurso 128013Alejandro IbarraОценок пока нет
- 3048 Guia5Документ104 страницы3048 Guia5Fiorella Rivadeneira100% (1)
- Cullen de Las Competencias A Los Saberes Socialmente ProductivosДокумент7 страницCullen de Las Competencias A Los Saberes Socialmente ProductivosDidáctica De Las Areas Disciplinares San Pedro100% (2)
- LIBRO FINAL Razonamiento Geometrico - XfinДокумент97 страницLIBRO FINAL Razonamiento Geometrico - XfinLaNterVipОценок пока нет
- Goddard, David - La Torre de La AlquimiaДокумент187 страницGoddard, David - La Torre de La AlquimiaSilver Foxy100% (3)
- Plantilla Alcohol, Drogas, Tabaquismo y EscuelaДокумент21 страницаPlantilla Alcohol, Drogas, Tabaquismo y EscuelaLucrecia GonzalezОценок пока нет
- Firmado 1695596419174 Final 6682b560 1Документ12 страницFirmado 1695596419174 Final 6682b560 1Isaac CastilloОценок пока нет
- Aprender A Estudiar para MejorarДокумент5 страницAprender A Estudiar para MejorarL.C. Jesús Alejandro Rosales ProОценок пока нет
- Constancia de InscripciónДокумент1 страницаConstancia de InscripciónCristian Pari MamaniОценок пока нет
- Semana 8 Taller Sociales Clei 3Документ2 страницыSemana 8 Taller Sociales Clei 3baironОценок пока нет
- PAP-Datos ImportantesДокумент147 страницPAP-Datos ImportantesMarcial Pomachagua VegaОценок пока нет
- Planeacion Didáctica Unidad 1 - Fundamentos de MercadoteniaДокумент14 страницPlaneacion Didáctica Unidad 1 - Fundamentos de MercadoteniaLulu RochaОценок пока нет
- Carl Rogers y Los GruposДокумент11 страницCarl Rogers y Los GruposIsabel Robles Lima100% (1)
- Plan de Mejora 16.3 Guia 11Документ3 страницыPlan de Mejora 16.3 Guia 11Cristian Chica100% (1)
- Proyecto de Vida Final PDFДокумент8 страницProyecto de Vida Final PDFYENNIFER IRENE GUADALUPE ORIHUELAОценок пока нет
- Informe de PasantiasДокумент21 страницаInforme de Pasantiasfernando23cОценок пока нет
- Helia Bravo HollisДокумент8 страницHelia Bravo HollisDarielОценок пока нет