Вам также может понравиться
- The Steam Turbine: 7.3.3 Rotor BalancingДокумент2 страницыThe Steam Turbine: 7.3.3 Rotor BalancingBhavana KewlaniОценок пока нет
- Sense'' Testing Combined Cycle Plants Competitive: Performance FOR IN IndustryДокумент11 страницSense'' Testing Combined Cycle Plants Competitive: Performance FOR IN IndustryharkiranrandhawaОценок пока нет
- Turbines and GoverningДокумент31 страницаTurbines and GoverningKVV100% (2)
- Dong Fang HistoryДокумент55 страницDong Fang Historyramnadh803181Оценок пока нет
- Auxiliary BoilerДокумент56 страницAuxiliary BoilerNirdosh AnanthОценок пока нет
- Steam Cycles - Lecture 2ndДокумент21 страницаSteam Cycles - Lecture 2ndSaifAdamz's100% (1)
- Vibrations in Steam TurbinesДокумент11 страницVibrations in Steam TurbinesAnudeep Chittluri100% (1)
- Basics of Governing System: Drawings Are Not As Per ActualДокумент25 страницBasics of Governing System: Drawings Are Not As Per ActualAhemad100% (1)
- Combustion Theory PPT OriginalДокумент30 страницCombustion Theory PPT Originalsameer betalОценок пока нет
- IAWPS GUIDELINES ON Instrumentation-2015Документ25 страницIAWPS GUIDELINES ON Instrumentation-2015prakashОценок пока нет
- Power Plant EfficiencyДокумент5 страницPower Plant EfficiencyMadhu BОценок пока нет
- Sample Question Paper Mechanical Working DrawingДокумент11 страницSample Question Paper Mechanical Working DrawingMohit PilaneОценок пока нет
- Bharat Heavy Electricals Limited: Thermal Power Plant Industrial TrainingДокумент20 страницBharat Heavy Electricals Limited: Thermal Power Plant Industrial TrainingSaurabh SinghОценок пока нет
- DC Motor ControllerДокумент7 страницDC Motor ControllerJan MicahОценок пока нет
- Power PlantДокумент14 страницPower PlantKanna B CoolОценок пока нет
- Design and Thermal Analysis of Steam Turbine Blade Using Fem MethodДокумент11 страницDesign and Thermal Analysis of Steam Turbine Blade Using Fem MethodMd NisarОценок пока нет
- Generator Capability CurveДокумент18 страницGenerator Capability Curvenamgyel30Оценок пока нет
- Steam TurbinesДокумент14 страницSteam TurbinesArvindPasuparthyОценок пока нет
- 34 - 244Документ208 страниц34 - 244rohithunni100% (1)
- Steam BoilerДокумент61 страницаSteam BoilerRol2Оценок пока нет
- Murray Steam Turbine - RGC IOM Speed IndicationДокумент38 страницMurray Steam Turbine - RGC IOM Speed Indicationhaniff azizОценок пока нет
- Operator's Guide to General Purpose Steam Turbines: An Overview of Operating Principles, Construction, Best Practices, and TroubleshootingОт EverandOperator's Guide to General Purpose Steam Turbines: An Overview of Operating Principles, Construction, Best Practices, and TroubleshootingРейтинг: 5 из 5 звезд5/5 (1)
- Oral Question Bank For Meo Class IiДокумент9 страницOral Question Bank For Meo Class IiKeshav ShahiОценок пока нет
- Turning Gear OperationДокумент9 страницTurning Gear Operationjavier100% (1)
- SSS Clutch PrinciplesДокумент4 страницыSSS Clutch PrinciplesmuddasirmasoodОценок пока нет
- Ge Gas Turbine Frame (9fa)Документ7 страницGe Gas Turbine Frame (9fa)ajo zinzoОценок пока нет
- Alignment Technique - The Steam TurbineДокумент2 страницыAlignment Technique - The Steam TurbineRajeswar KulanjiОценок пока нет
- ROTALIGN-Ultra Shaft-Alignment ALI9-846 02-05 1.20 G PDFДокумент88 страницROTALIGN-Ultra Shaft-Alignment ALI9-846 02-05 1.20 G PDFDon FreemanОценок пока нет
- Soot Sticks-Soot RemoverДокумент2 страницыSoot Sticks-Soot Removeravm4343Оценок пока нет
- 4-Hour Lockout Avoidance For LM2500 and LM6000 Gas Turbines: Conversion, Modification and Upgrade OfferingДокумент1 страница4-Hour Lockout Avoidance For LM2500 and LM6000 Gas Turbines: Conversion, Modification and Upgrade OfferingabedurahmanОценок пока нет
- Chapter-1 Steam Turbine TheoryДокумент17 страницChapter-1 Steam Turbine TheorybhaskarОценок пока нет
- Curtis TurbineДокумент18 страницCurtis TurbineDivya Prakash SrivastavaОценок пока нет
- Indirect Dryers For Biomass Drying-Comparison of Experimental Characteristics For Drum and Rotary ConfigurationsДокумент11 страницIndirect Dryers For Biomass Drying-Comparison of Experimental Characteristics For Drum and Rotary ConfigurationsRenalyn TorioОценок пока нет
- A Research Paper On Design and Analysis of Shaftless Steam TurbineДокумент5 страницA Research Paper On Design and Analysis of Shaftless Steam TurbineEditor IJTSRDОценок пока нет
- Load Rejection TestДокумент3 страницыLoad Rejection TestRaju SkОценок пока нет
- Rolls Royce Gas Engine of 5.255 MWДокумент1 страницаRolls Royce Gas Engine of 5.255 MWRashid Mahmood0% (1)
- Turbines - New Module Hay PDFДокумент191 страницаTurbines - New Module Hay PDFThái Mai Đình100% (1)
- 12 SiemensДокумент37 страниц12 SiemensrodrigocampospkОценок пока нет
- Excitation System of Alternator IJERTV2IS2515Документ6 страницExcitation System of Alternator IJERTV2IS2515MangeshRudrawar100% (1)
- November 2016: SECTION - 1: Answer at Least TWO Questions SECTION - 2: Answer at Least TWO QuestionsДокумент2 страницыNovember 2016: SECTION - 1: Answer at Least TWO Questions SECTION - 2: Answer at Least TWO QuestionsArun SОценок пока нет
- Generator Turbine Shutdown ProcedureДокумент3 страницыGenerator Turbine Shutdown ProcedureAfifexОценок пока нет
- Designing of Center CrankshaftДокумент24 страницыDesigning of Center CrankshaftAshvathSharma0% (1)
- How Generator Works and Compete With Load Set PointДокумент7 страницHow Generator Works and Compete With Load Set PointLakshmi NarayanОценок пока нет
- Instrument & Service AirДокумент2 страницыInstrument & Service AirIgn AgungОценок пока нет
- Question Answers On Steam TurbinesДокумент4 страницыQuestion Answers On Steam TurbinesanoopkntpcОценок пока нет
- Marine Gas Turbine: Performance LM6000PC LM6000PG OutputДокумент2 страницыMarine Gas Turbine: Performance LM6000PC LM6000PG Outputgasturbina4983Оценок пока нет
- 57-62 1m809 - Eng72dpiДокумент6 страниц57-62 1m809 - Eng72dpiAbhinav TewariОценок пока нет
- New Moment WeightДокумент16 страницNew Moment WeightRaj KiranОценок пока нет
- Steam Turbine and Auxiliary EquipmentДокумент11 страницSteam Turbine and Auxiliary EquipmentReza MustofaОценок пока нет
- Steam Circulation SystemДокумент36 страницSteam Circulation Systemjkhan_724384100% (1)
- APHДокумент15 страницAPHKarthi KeyanОценок пока нет
- Why Air Vent Should Be Closed Maintaining 2kg/cm 2 Drum Level Pressure at Starting of Boiler Operation?Документ2 страницыWhy Air Vent Should Be Closed Maintaining 2kg/cm 2 Drum Level Pressure at Starting of Boiler Operation?Ashish KapoorОценок пока нет
- Troubleshooting Boiler OperationДокумент5 страницTroubleshooting Boiler OperationRahul ChandrawarОценок пока нет
- O&M - TurbineДокумент108 страницO&M - TurbineRam KrishnaОценок пока нет
- Simulink - Model - Turbine - SiemensДокумент5 страницSimulink - Model - Turbine - SiemensJoseAgaptoОценок пока нет
- 3-Steam Turbine GovernorДокумент7 страниц3-Steam Turbine GovernorVivek PawarОценок пока нет
- Synchronous MachineДокумент51 страницаSynchronous MachineahmmsayemОценок пока нет
- Matlab Stabilite Örnekleri̇ 1Документ11 страницMatlab Stabilite Örnekleri̇ 1Muhammed Cihat AltınОценок пока нет
- PSMS Lab ManualДокумент42 страницыPSMS Lab ManualIrfan Ali100% (1)
- TNM History Updated June2017Документ2 страницыTNM History Updated June2017Lucas AndreoОценок пока нет
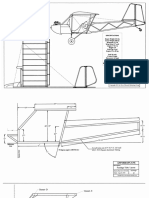
- Plans PDFДокумент49 страницPlans PDFEstevam Gomes de Azevedo85% (34)
- Module 1 Notes The White Bird Reading The Image Painting Analysis PDFДокумент4 страницыModule 1 Notes The White Bird Reading The Image Painting Analysis PDFMelbely Rose Apigo BaduaОценок пока нет
- Hopeless PlacesДокумент1 304 страницыHopeless Placesmoreblessingmarvellous659Оценок пока нет
- Case Studies of Transportation Public-Private Partnerships Around The WorldДокумент158 страницCase Studies of Transportation Public-Private Partnerships Around The WorldzhenhuaruiОценок пока нет
- Honeycomb Kevlar 49 (Hexcel)Документ3 страницыHoneycomb Kevlar 49 (Hexcel)Julia GarciaОценок пока нет
- Ensemble Averaging (Machine Learning)Документ3 страницыEnsemble Averaging (Machine Learning)emma698Оценок пока нет
- Worlds Apart: A Story of Three Possible Warmer WorldsДокумент1 страницаWorlds Apart: A Story of Three Possible Warmer WorldsJuan Jose SossaОценок пока нет
- 3 Tasks and ANS - Gamma Maths PDFДокумент6 страниц3 Tasks and ANS - Gamma Maths PDFNora ZhangОценок пока нет
- Tree Growth CharacteristicsДокумент9 страницTree Growth CharacteristicsMunganОценок пока нет
- Plastics and Polymer EngineeringДокумент4 страницыPlastics and Polymer Engineeringsuranjana26Оценок пока нет
- Eldritch HighДокумент39 страницEldritch Highteam_moОценок пока нет
- The Light Fantastic by Sarah CombsДокумент34 страницыThe Light Fantastic by Sarah CombsCandlewick PressОценок пока нет
- Structural Analysis and Design of Pressure Hulls - The State of The Art and Future TrendsДокумент118 страницStructural Analysis and Design of Pressure Hulls - The State of The Art and Future TrendsRISHABH JAMBHULKARОценок пока нет
- Surface TensionДокумент13 страницSurface TensionElizebeth GОценок пока нет
- Ham Radio Balu N ManualДокумент7 страницHam Radio Balu N Manualcolinbeeforth100% (1)
- Managing Diabetic Foot Ulcers ReadingДокумент21 страницаManaging Diabetic Foot Ulcers Readinghimanshugupta811997Оценок пока нет
- Cost Analysis - Giberson Art GlassДокумент3 страницыCost Analysis - Giberson Art GlassSessy Saly50% (2)
- CapstoneДокумент23 страницыCapstoneA - CAYAGA, Kirby, C 12 - HermonОценок пока нет
- Straight LineДокумент15 страницStraight LineAyanОценок пока нет
- Lecture 12Документ8 страницLecture 12Mechanical ZombieОценок пока нет
- 1970 - Transformer FMEA PDFДокумент7 страниц1970 - Transformer FMEA PDFSing Yew Lam0% (1)
- 07ercoskun 05 01 PDFДокумент23 страницы07ercoskun 05 01 PDFjagmadridОценок пока нет
- Texto EBAU 1Документ2 страницыTexto EBAU 1haridianrm13Оценок пока нет
- Save Water SpeechДокумент4 страницыSave Water SpeechHari Prakash Shukla0% (1)
- Impact of Retrofitting Existing Combined Heat and Power Plant With Polygeneration of Biomethane PDFДокумент16 страницImpact of Retrofitting Existing Combined Heat and Power Plant With Polygeneration of Biomethane PDFAwais Salman0% (1)
- Mean Variance Portfolio TheoryДокумент85 страницMean Variance Portfolio TheoryEbenezerОценок пока нет
- Sales 20: Years Advertising Expense (Millions) X Sales (Thousands) yДокумент8 страницSales 20: Years Advertising Expense (Millions) X Sales (Thousands) ybangОценок пока нет
- Clevo W940tu Service ManualДокумент93 страницыClevo W940tu Service ManualBruno PaezОценок пока нет
- Bulacan Agricultural State College: Lesson Plan in Science 4 Life Cycle of Humans, Animals and PlantsДокумент6 страницBulacan Agricultural State College: Lesson Plan in Science 4 Life Cycle of Humans, Animals and PlantsHarmonica PellazarОценок пока нет