Вам также может понравиться
- 2602 - Basics of Multiplexers 2 - SlidesДокумент10 страниц2602 - Basics of Multiplexers 2 - Slidesthangaraj_icОценок пока нет
- IDDQ Failure Diagnosis Is Here: Ron PressДокумент2 страницыIDDQ Failure Diagnosis Is Here: Ron Pressthangaraj_icОценок пока нет
- Thirumanthirambook 1Документ39 страницThirumanthirambook 1jeyankarunanithiОценок пока нет
- Atmel 2521 AVR Hardware Design Considerations ApplicationNote AVR042Документ21 страницаAtmel 2521 AVR Hardware Design Considerations ApplicationNote AVR042thangaraj_icОценок пока нет
- WWW Planetanalog Com DifferentialSignaling 1Документ5 страницWWW Planetanalog Com DifferentialSignaling 1thangaraj_icОценок пока нет
- Analog Layout and Grounding TechniquesДокумент7 страницAnalog Layout and Grounding TechniquesSijo XaviarОценок пока нет
- Day3 FLEXДокумент49 страницDay3 FLEXthangaraj_ic100% (1)
- ) $$1 - ADE %ASY: #-/3) $$1 4EST - ETHODOLOGY &undamental #OnceptsДокумент32 страницы) $$1 - ADE %ASY: #-/3) $$1 4EST - ETHODOLOGY &undamental #OnceptsSainadh YerrapragadaОценок пока нет
- 75 How To Stop Worrying and Start Living PDFДокумент6 страниц75 How To Stop Worrying and Start Living PDFFelimon Megerssa100% (2)
- An 345Документ4 страницыAn 345thangaraj_icОценок пока нет
- App 119Документ19 страницApp 119thangaraj_icОценок пока нет
- Adc DNL INLДокумент5 страницAdc DNL INLNabil IshamОценок пока нет
- Layout Design GuideДокумент41 страницаLayout Design Guidethangaraj_icОценок пока нет
- App 114Документ17 страницApp 114thangaraj_icОценок пока нет
- e2e.ti.comДокумент3 страницыe2e.ti.comthangaraj_icОценок пока нет
- Bhaja Govindam Tamil LyricsДокумент6 страницBhaja Govindam Tamil Lyricsthangaraj_icОценок пока нет
- P 1779Документ4 страницыP 1779thangaraj_icОценок пока нет
- WWW Planetanalog Com CurrentsenseДокумент6 страницWWW Planetanalog Com Currentsensethangaraj_icОценок пока нет
- Getting The Best Out of Your Precision Design With Zero Drift Amplifiers Part 2Документ7 страницGetting The Best Out of Your Precision Design With Zero Drift Amplifiers Part 2thangaraj_icОценок пока нет
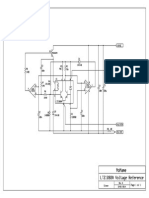
- LTZ Ref BoardДокумент1 страницаLTZ Ref Boardthangaraj_icОценок пока нет
- AppendixДокумент23 страницыAppendixthangaraj_icОценок пока нет
- Embeddedgurus ComДокумент5 страницEmbeddedgurus Comthangaraj_icОценок пока нет
- 12b.iep Activity1 2013Документ28 страниц12b.iep Activity1 2013demos2011Оценок пока нет
- EMC and NoiseДокумент47 страницEMC and Noisethangaraj_icОценок пока нет
- Instrumentation AmplifierДокумент6 страницInstrumentation Amplifierilg1Оценок пока нет
- Hybrid PCB Stack Up GuideДокумент13 страницHybrid PCB Stack Up Guidethangaraj_icОценок пока нет
- Understanding DC Instrumentation AmplifiersДокумент4 страницыUnderstanding DC Instrumentation Amplifiersthangaraj_icОценок пока нет
- PCBStackups (Ott)Документ18 страницPCBStackups (Ott)krishnamohankola321Оценок пока нет
- Agarwal A., Lang J. - Foundations of Analog and Digital Electronic Circuits - Supplemental Sections and Examples - 2005Документ136 страницAgarwal A., Lang J. - Foundations of Analog and Digital Electronic Circuits - Supplemental Sections and Examples - 2005შაქრო ტრუბეცკოიОценок пока нет
- Subsection 4 4 1Документ6 страницSubsection 4 4 1thangaraj_icОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
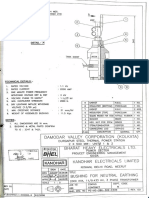
- 2 Mva Bushing Neutral EarthingДокумент1 страница2 Mva Bushing Neutral Earthingindrajit mondalОценок пока нет
- Load Bank Design: Joshua BardwellДокумент16 страницLoad Bank Design: Joshua BardwellDefinal ChaniagoОценок пока нет
- Babelan - UPS Training - 29Документ29 страницBabelan - UPS Training - 29dimasrimantiktoОценок пока нет
- FCM-75kW-Standalone (ETP-Chennai Location) (ID 793838)Документ12 страницFCM-75kW-Standalone (ETP-Chennai Location) (ID 793838)Gopikrishnan ThangarajОценок пока нет
- IK CatalogueДокумент28 страницIK CatalogueChjdsОценок пока нет
- UntitledДокумент2 страницыUntitledAnamika GuptaОценок пока нет
- XH-SCT-T50-1000-05: FeaturesДокумент8 страницXH-SCT-T50-1000-05: FeaturesJyoti ShresthaОценок пока нет
- Equipment DetailsДокумент10 страницEquipment Detailsimranjani.skОценок пока нет
- AP102 General Physics II Lab Report 5 Electrical Circuit and Its Component 2Документ15 страницAP102 General Physics II Lab Report 5 Electrical Circuit and Its Component 2Debby SyefiraОценок пока нет
- Modeling of The Synchronous Cascade Control Industrial Ring Motor From The Bralima CompanyДокумент7 страницModeling of The Synchronous Cascade Control Industrial Ring Motor From The Bralima CompanyInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- 4 Pole Circuit BreakerДокумент2 страницы4 Pole Circuit BreakerMin ZayarОценок пока нет
- Ower Electronics: By: MSC Eng. Ismaeil AlnaabДокумент109 страницOwer Electronics: By: MSC Eng. Ismaeil Alnaabعبدالرحمن محمد جاسم حمودОценок пока нет
- WEG Turbogenerators St20 and St40 Lines 50019094 Brochure EnglishДокумент8 страницWEG Turbogenerators St20 and St40 Lines 50019094 Brochure EnglishVelu SamyОценок пока нет
- PM42M048Документ1 страницаPM42M048Lendry NormanОценок пока нет
- Parts and Function of A Welding MachineДокумент19 страницParts and Function of A Welding MachineABEGRACE LIG-ANGОценок пока нет
- File Name StamperДокумент35 страницFile Name StampersohaibazamОценок пока нет
- Ads1000 User Manual Atten 1 0Документ17 страницAds1000 User Manual Atten 1 0Fidel E Ticse100% (1)
- Tests According To IEC-En Standards (WAGO)Документ11 страницTests According To IEC-En Standards (WAGO)va3ttnОценок пока нет
- 0001-Definitions-IEC - 60601-62353Документ2 страницы0001-Definitions-IEC - 60601-62353edgar_dauzonОценок пока нет
- Variable Frequency Drive or VFDДокумент4 страницыVariable Frequency Drive or VFDramsingh2613Оценок пока нет
- Group1 - A4Conductors and InsulatorsДокумент5 страницGroup1 - A4Conductors and InsulatorsLance CadiangОценок пока нет
- On-Load Tap-Changer OILTAP® G: Technical Data TD 48Документ34 страницыOn-Load Tap-Changer OILTAP® G: Technical Data TD 48Ravindra AngalОценок пока нет
- QRO PA 144 MHz 20 kW GU36B-1 Tube AmplifierДокумент51 страницаQRO PA 144 MHz 20 kW GU36B-1 Tube Amplifierverd leonardОценок пока нет
- Section 4 - Arc-Flash Protection: SEL-751A Feeder Protection Relay - APP 751AДокумент28 страницSection 4 - Arc-Flash Protection: SEL-751A Feeder Protection Relay - APP 751ABouazzaОценок пока нет
- HT-8 Panel Drawi̇ngДокумент28 страницHT-8 Panel Drawi̇ngminhasranaОценок пока нет
- Neutral Wires. These Wires Are Color Coded For Easy Identification. Hot Wires Are Black or RedДокумент17 страницNeutral Wires. These Wires Are Color Coded For Easy Identification. Hot Wires Are Black or Redvalerie candoОценок пока нет
- How To Reduce The Spike NoiseДокумент1 страницаHow To Reduce The Spike NoiseOmar Morales ReinaОценок пока нет
- RGF 1Документ4 страницыRGF 1mickymausОценок пока нет
- Relay Circuit PDFДокумент8 страницRelay Circuit PDFGuru Mishra100% (1)