Вам также может понравиться
- Small Unmanned Aircraft: Theory and PracticeОт EverandSmall Unmanned Aircraft: Theory and PracticeРейтинг: 4.5 из 5 звезд4.5/5 (2)
- World's Largest Science, Technology & Medicine Open Access Book PublisherДокумент29 страницWorld's Largest Science, Technology & Medicine Open Access Book Publisherggokhans_666584708Оценок пока нет
- Radio Remote-Control and Telemetry and Their Application to MissilesОт EverandRadio Remote-Control and Telemetry and Their Application to MissilesРейтинг: 4 из 5 звезд4/5 (1)
- Cognitive EngineeringДокумент6 страницCognitive EngineeringartamzaimiОценок пока нет
- Expert System: Fundamentals and Applications for Teaching Computers to Think like ExpertsОт EverandExpert System: Fundamentals and Applications for Teaching Computers to Think like ExpertsОценок пока нет
- The Payload May Include A Robotic System ComprisingДокумент19 страницThe Payload May Include A Robotic System ComprisingmohammedОценок пока нет
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentОт EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentОценок пока нет
- 0 - A Survey On Aerial Swarm RoboticsДокумент19 страниц0 - A Survey On Aerial Swarm RoboticsDayana Narvaez MartinezОценок пока нет
- 1 s2.0 S1389041716000048 MainДокумент15 страниц1 s2.0 S1389041716000048 MainJuan ZarateОценок пока нет
- State of Work On Wearable ComputersДокумент12 страницState of Work On Wearable ComputersSamarth SamaОценок пока нет
- Air Traffic ControlДокумент180 страницAir Traffic ControlAditya RallapalliОценок пока нет
- 81-Designing A System For Mobile Manipulation FromДокумент6 страниц81-Designing A System For Mobile Manipulation FromHaider AliОценок пока нет
- 2030 (Frost)Документ17 страниц2030 (Frost)Sonal KaliaОценок пока нет
- Sensors 19 00648Документ29 страницSensors 19 00648qwertzuiopОценок пока нет
- Sols Papers MicrorobotДокумент10 страницSols Papers MicrorobotRAPRATSINОценок пока нет
- A Review of Mobile Robots: Concepts, Methods, Theoretical Framework, and ApplicationsДокумент22 страницыA Review of Mobile Robots: Concepts, Methods, Theoretical Framework, and Applicationsماجد الرويليОценок пока нет
- Remote Sensing: A Review On Iot Deep Learning Uav Systems For Autonomous Obstacle Detection and Collision AvoidanceДокумент29 страницRemote Sensing: A Review On Iot Deep Learning Uav Systems For Autonomous Obstacle Detection and Collision AvoidanceMatheus Cardoso SantosОценок пока нет
- A Remote Robotics Laboratory On The InternetДокумент8 страницA Remote Robotics Laboratory On The InternetVikas YadavОценок пока нет
- Expert Systems Station Automation: For SpaceДокумент6 страницExpert Systems Station Automation: For SpaceAlfredo Esquivel IslasОценок пока нет
- Review of Developments in Active Exoskeleton RobotsДокумент10 страницReview of Developments in Active Exoskeleton RobotsCathlyn AbionОценок пока нет
- Brief History of UGV DevelopmentДокумент10 страницBrief History of UGV DevelopmentadekusutОценок пока нет
- Challenges in Regulating Ever-Changing Space TechnologiesДокумент13 страницChallenges in Regulating Ever-Changing Space Technologiesamardeep singhОценок пока нет
- An Introduction To Collective IntelligenceДокумент88 страницAn Introduction To Collective IntelligencepsiserviciosprofeОценок пока нет
- Autonomous Aerial VehiclesДокумент15 страницAutonomous Aerial VehiclesRathiya ArifОценок пока нет
- How Do We Fix System EngineeringДокумент9 страницHow Do We Fix System Engineeringjwpaprk1Оценок пока нет
- Collaborative Robotics Toolkit CRTK Open Software Framework For Surgical Robotics Research-2Документ8 страницCollaborative Robotics Toolkit CRTK Open Software Framework For Surgical Robotics Research-2Varun KumarОценок пока нет
- Mechanical Structures For Robotic Hands Based On The "Compliant Mechanism" ConceptДокумент8 страницMechanical Structures For Robotic Hands Based On The "Compliant Mechanism" Conceptsat0112Оценок пока нет
- DroneДокумент19 страницDroneArchit SomaniОценок пока нет
- Aerospace Technologies Advancements PDFДокумент514 страницAerospace Technologies Advancements PDFskilmag100% (1)
- A Review On Spider Robotic SystemДокумент7 страницA Review On Spider Robotic SystemHassan allaОценок пока нет
- The NASA Automation and Robotics Technology ProgramДокумент8 страницThe NASA Automation and Robotics Technology ProgramBhavesh KapilОценок пока нет
- Techniques of Artificial Intelligence For Space Applications - A SurveyДокумент14 страницTechniques of Artificial Intelligence For Space Applications - A SurveyKingOfKings 007Оценок пока нет
- Machines 07 00042 PDFДокумент21 страницаMachines 07 00042 PDFguterresОценок пока нет
- A New Conceptual Approach To The Design of Hybrid Control Architecture For Autonomous Mobile RobotsДокумент27 страницA New Conceptual Approach To The Design of Hybrid Control Architecture For Autonomous Mobile RobotsEDU ANDERSON BLAS GENOVEZОценок пока нет
- 1 JouPaper01Документ27 страниц1 JouPaper01EDU ANDERSON BLAS GENOVEZОценок пока нет
- Avionics Human-Machine Interfaces and Interactions For Manned and Unmanned AircraftДокумент46 страницAvionics Human-Machine Interfaces and Interactions For Manned and Unmanned AircraftwztangphdОценок пока нет
- Proceedings of The 1st International Workshop On Autonomous Systems Safety95882Документ15 страницProceedings of The 1st International Workshop On Autonomous Systems Safety95882Marwan CompОценок пока нет
- Are View On Spider Robotic SystemДокумент7 страницAre View On Spider Robotic SystemSainadh PulamarasettiОценок пока нет
- Mechatronics Robotics and Components For Automation and Control - IfAC Milestone ReportДокумент14 страницMechatronics Robotics and Components For Automation and Control - IfAC Milestone ReportToan NguyenОценок пока нет
- Shell Model ICAOДокумент4 страницыShell Model ICAOairbuk doeingОценок пока нет
- Abstract. Nowadays Space Robotics As A Science and Technology BecomesДокумент5 страницAbstract. Nowadays Space Robotics As A Science and Technology BecomesRahul SunnyОценок пока нет
- Space Flight SystemsДокумент20 страницSpace Flight SystemsMaria SpencerОценок пока нет
- Robotic SystemДокумент24 страницыRobotic SystemadimrinОценок пока нет
- Human-State-Aware Controller For A Tethered Aerial Robot Guiding A Human by Physical InteractionДокумент8 страницHuman-State-Aware Controller For A Tethered Aerial Robot Guiding A Human by Physical InteractionBT20CME036-Gonna YaswanthОценок пока нет
- Module III: Six Important Characteristics of Contemporary Science and TechnologyДокумент13 страницModule III: Six Important Characteristics of Contemporary Science and TechnologyCarmsОценок пока нет
- 3.toward A Mobile AutonomousДокумент8 страниц3.toward A Mobile AutonomoussandeeppothugantiОценок пока нет
- 1441957561Документ356 страниц1441957561Guilherme Augusto CecatoОценок пока нет
- Continuum Robots For Medical Applications: A SurveyДокумент20 страницContinuum Robots For Medical Applications: A SurveyErwin PerdanaОценок пока нет
- (Space Technology Library 33) F. Landis Markley, John L. Crassidis (Auth.) - Fundamentals of Spacecraft Attitude Determination and Control-Springer-Verlag New York (2014) PDFДокумент495 страниц(Space Technology Library 33) F. Landis Markley, John L. Crassidis (Auth.) - Fundamentals of Spacecraft Attitude Determination and Control-Springer-Verlag New York (2014) PDFSherlock HolmesОценок пока нет
- Siddharth DhimanДокумент9 страницSiddharth DhimansumitОценок пока нет
- A Rtificial Intelligence and Robotics: Contributi ScientificiДокумент7 страницA Rtificial Intelligence and Robotics: Contributi Scientificibiswa217Оценок пока нет
- Examining Application-Specific Resiliency ImplemenДокумент26 страницExamining Application-Specific Resiliency ImplemenMuhammedNayeemОценок пока нет
- NanoДокумент26 страницNanovr7210495Оценок пока нет
- A Behavior-Based Architecture For Unmanned Aerial: VehiclesДокумент7 страницA Behavior-Based Architecture For Unmanned Aerial: VehiclesJoao PedroОценок пока нет
- 22 Testbeds: Bridges From Research To Infrastructure: Charlie Catlett John TooleДокумент28 страниц22 Testbeds: Bridges From Research To Infrastructure: Charlie Catlett John Toolem_ramkumar928409Оценок пока нет
- Autonomous Aerial Robots Deploy Loads for SARДокумент18 страницAutonomous Aerial Robots Deploy Loads for SARNilОценок пока нет
- Navigation of Autonomous Robotic Vehicles Using Fuzzy LogicДокумент6 страницNavigation of Autonomous Robotic Vehicles Using Fuzzy LogicNurhijjah Juliana RambeОценок пока нет
- Sensors 22 04022Документ27 страницSensors 22 04022Nikhil AhirwarОценок пока нет
- Micro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Документ10 страницMicro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Srini VasuluОценок пока нет
- Paparazzi Model PDFДокумент7 страницPaparazzi Model PDFnashidzoneОценок пока нет
- Pan Os 6.1 Cli RefДокумент784 страницыPan Os 6.1 Cli RefAnubhaw KumarОценок пока нет
- Deception Solution Overview: Deceive. Detect. DefendДокумент4 страницыDeception Solution Overview: Deceive. Detect. DefendJimmy Alfaro HernandezОценок пока нет
- Cortex XDR AdminДокумент138 страницCortex XDR AdminJimmy Alfaro HernandezОценок пока нет
- Proxy SG - Current PlatformsДокумент2 страницыProxy SG - Current PlatformsJimmy Alfaro HernandezОценок пока нет
- Mitre Attack Framework Finding Cyber Threats With Att&Ck Based AnalyticsДокумент53 страницыMitre Attack Framework Finding Cyber Threats With Att&Ck Based AnalyticsPrasoonОценок пока нет
- Hypertext Transfer Protocol (HTTP) Status Code RegistryДокумент2 страницыHypertext Transfer Protocol (HTTP) Status Code RegistryJimmy Alfaro HernandezОценок пока нет
- Cortex Data Lake: Getting Started GuideДокумент40 страницCortex Data Lake: Getting Started GuideJimmy Alfaro HernandezОценок пока нет
- PE101 v1 PDFДокумент1 страницаPE101 v1 PDFVishnu GorantlaОценок пока нет
- Panorama PDFДокумент5 страницPanorama PDFJimmy Alfaro HernandezОценок пока нет
- Cortex XDR Setup Guide: September 2019Документ28 страницCortex XDR Setup Guide: September 2019Jimmy Alfaro HernandezОценок пока нет
- Panorama Admin Guide Palo Alto NetworksДокумент414 страницPanorama Admin Guide Palo Alto NetworksJimmy Alfaro Hernandez100% (1)
- Guide Handle Incident NistДокумент79 страницGuide Handle Incident NistMeo MapОценок пока нет
- Expedited 4 Hour Global Rma ServiceДокумент2 страницыExpedited 4 Hour Global Rma ServiceJimmy Alfaro HernandezОценок пока нет
- SSL Cipher Cs A4 02Документ4 страницыSSL Cipher Cs A4 02Jimmy Alfaro HernandezОценок пока нет
- GlobalProtect Configuration Rev IДокумент54 страницыGlobalProtect Configuration Rev IJimmy Alfaro HernandezОценок пока нет
- Footprinting PDFДокумент41 страницаFootprinting PDFJimmy Alfaro HernandezОценок пока нет
- MC CLI Ref 132xДокумент25 страницMC CLI Ref 132xJimmy Alfaro HernandezОценок пока нет
- The Authoritative Guide To DNS TerminologyДокумент8 страницThe Authoritative Guide To DNS TerminologysinesacurОценок пока нет
- Network+ Guide To Networks 6 Edition: Network Hardware, Switching, and RoutingДокумент63 страницыNetwork+ Guide To Networks 6 Edition: Network Hardware, Switching, and RoutingJimmy Alfaro HernandezОценок пока нет
- Network+ Guide To Networks 6 Edition: An Introduction To NetworkingДокумент48 страницNetwork+ Guide To Networks 6 Edition: An Introduction To NetworkingJimmy Alfaro HernandezОценок пока нет
- Hypalon Lining PDFДокумент5 страницHypalon Lining PDFJimmy Alfaro HernandezОценок пока нет
- Mesh To Micron ConverterДокумент1 страницаMesh To Micron ConverterAniket royОценок пока нет
- Fluorogold PDFДокумент14 страницFluorogold PDFnileshmadankarОценок пока нет
- Safety Gate - Double BarДокумент1 страницаSafety Gate - Double BarJimmy Alfaro HernandezОценок пока нет
- 10 Spray BallsДокумент3 страницы10 Spray BallsJimmy Alfaro HernandezОценок пока нет
- ASME B16.11 THREADED FITTINGS SPECДокумент3 страницыASME B16.11 THREADED FITTINGS SPECJimmy Alfaro Hernandez0% (1)
- Gaskets Asme b16.20Документ1 страницаGaskets Asme b16.20Jimmy Alfaro HernandezОценок пока нет
- FORGED OUTLET FITTINGSДокумент3 страницыFORGED OUTLET FITTINGSD_carolina50% (2)
- 11 CatalogДокумент25 страниц11 CatalogJimmy Alfaro HernandezОценок пока нет
- UntitledДокумент503 страницыUntitledjewelmirОценок пока нет
- 1.5 System SoftwareДокумент25 страниц1.5 System SoftwareSooraj RajmohanОценок пока нет
- Airline Reservation SystemДокумент18 страницAirline Reservation SystemAsha AshaОценок пока нет
- PCM Codes For MitsubishiДокумент6 страницPCM Codes For MitsubishiahmednallaОценок пока нет
- Java Programming Language Report: January 2021Документ15 страницJava Programming Language Report: January 2021Maynk VarmaОценок пока нет
- Maxwell Flitton - Rust Web Programming - A Hands-On Guide To Developing, Packaging, and Deploying Fully Functional Rust Web Applications,-Packt Publishing (2023)Документ666 страницMaxwell Flitton - Rust Web Programming - A Hands-On Guide To Developing, Packaging, and Deploying Fully Functional Rust Web Applications,-Packt Publishing (2023)coder seekerОценок пока нет
- Airline Autoflight Training ManualДокумент190 страницAirline Autoflight Training ManualINFO WORKLINKОценок пока нет
- Benefits of OOP: ReusabilityДокумент2 страницыBenefits of OOP: Reusabilityaarthy31Оценок пока нет
- Job Description - Mid-Level Full Stack Engineer (NodeДокумент2 страницыJob Description - Mid-Level Full Stack Engineer (Nodefemawox385Оценок пока нет
- Dr. Raj SinghДокумент22 страницыDr. Raj SinghAli OzdemirОценок пока нет
- Reviewing the Evolution of Lean ThinkingДокумент18 страницReviewing the Evolution of Lean ThinkingW4tsonnОценок пока нет
- Complete IT and InfoSec RFP For HRMSДокумент22 страницыComplete IT and InfoSec RFP For HRMSshwetank sharmaОценок пока нет
- Hemi EngineДокумент23 страницыHemi Enginesurendrabarwar7Оценок пока нет
- Cpu SchedulingДокумент26 страницCpu SchedulingBobby chОценок пока нет
- hlERrE3 Rae2Ey TCNZVGW - Applying The NIST CSFДокумент3 страницыhlERrE3 Rae2Ey TCNZVGW - Applying The NIST CSFWalid AliОценок пока нет
- Javascript Tutorial: Why To Learn JavascriptДокумент3 страницыJavascript Tutorial: Why To Learn JavascriptsurvivalofthepolyОценок пока нет
- SF s4 Ec Ee Data Hci En-UsДокумент254 страницыSF s4 Ec Ee Data Hci En-UsronakjhuthawatОценок пока нет
- RupДокумент52 страницыRupmojtaba7Оценок пока нет
- Project1 ReportДокумент31 страницаProject1 ReportAshis MohantyОценок пока нет
- Q. Explain Booch Methodology. Booch Method:: NotationДокумент7 страницQ. Explain Booch Methodology. Booch Method:: NotationVishal GotaraneОценок пока нет
- Dependency Management in A Large Agile EnvironmentДокумент6 страницDependency Management in A Large Agile EnvironmentIQ3 Solutions GroupОценок пока нет
- Sg5 Tla3 AlbaДокумент7 страницSg5 Tla3 AlbaRya Miguel AlbaОценок пока нет
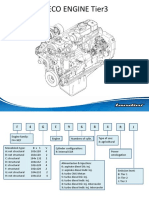
- Iveco Engine T3Документ33 страницыIveco Engine T3Marian Taras100% (1)
- INTERNSHIP REPORT Satyajeet.Документ29 страницINTERNSHIP REPORT Satyajeet.Ashish AmbiОценок пока нет
- Resume Ac7786c6 2Документ1 страницаResume Ac7786c6 2PS 4 MTAОценок пока нет
- Mtu 16V4000 Ds2050: Standby Power: 2070 Kwel 60 Hz/Water Charge Air Cooling/Fuel Consumption OptimizedДокумент2 страницыMtu 16V4000 Ds2050: Standby Power: 2070 Kwel 60 Hz/Water Charge Air Cooling/Fuel Consumption OptimizedDaniel MuratallaОценок пока нет
- Doing Agile Versus Being AgileДокумент6 страницDoing Agile Versus Being AgileRefineM Project Management Consulting100% (1)
- Devtest Driving Continuous Testing With Service Virtualization PDFДокумент8 страницDevtest Driving Continuous Testing With Service Virtualization PDFMohit BishtОценок пока нет
- Cls 8 Comp Annual 2020-21 PDFДокумент2 страницыCls 8 Comp Annual 2020-21 PDFAnshuman TripathyОценок пока нет
- WT Assignment 1Документ1 страницаWT Assignment 1Saksham SahasiОценок пока нет
- The Coaching Habit: Say Less, Ask More & Change the Way You Lead ForeverОт EverandThe Coaching Habit: Say Less, Ask More & Change the Way You Lead ForeverРейтинг: 4.5 из 5 звезд4.5/5 (186)
- Scaling Up: How a Few Companies Make It...and Why the Rest Don't, Rockefeller Habits 2.0От EverandScaling Up: How a Few Companies Make It...and Why the Rest Don't, Rockefeller Habits 2.0Оценок пока нет
- Leadership Skills that Inspire Incredible ResultsОт EverandLeadership Skills that Inspire Incredible ResultsРейтинг: 4.5 из 5 звезд4.5/5 (11)
- How to Lead: Wisdom from the World's Greatest CEOs, Founders, and Game ChangersОт EverandHow to Lead: Wisdom from the World's Greatest CEOs, Founders, and Game ChangersРейтинг: 4.5 из 5 звезд4.5/5 (94)
- The First Minute: How to start conversations that get resultsОт EverandThe First Minute: How to start conversations that get resultsРейтинг: 4.5 из 5 звезд4.5/5 (55)
- How to Talk to Anyone at Work: 72 Little Tricks for Big Success Communicating on the JobОт EverandHow to Talk to Anyone at Work: 72 Little Tricks for Big Success Communicating on the JobРейтинг: 4.5 из 5 звезд4.5/5 (36)
- Spark: How to Lead Yourself and Others to Greater SuccessОт EverandSpark: How to Lead Yourself and Others to Greater SuccessРейтинг: 4.5 из 5 звезд4.5/5 (130)
- How the World Sees You: Discover Your Highest Value Through the Science of FascinationОт EverandHow the World Sees You: Discover Your Highest Value Through the Science of FascinationРейтинг: 4 из 5 звезд4/5 (7)
- 7 Principles of Transformational Leadership: Create a Mindset of Passion, Innovation, and GrowthОт Everand7 Principles of Transformational Leadership: Create a Mindset of Passion, Innovation, and GrowthРейтинг: 5 из 5 звезд5/5 (51)
- Billion Dollar Lessons: What You Can Learn from the Most Inexcusable Business Failures of the Last Twenty-five YearsОт EverandBillion Dollar Lessons: What You Can Learn from the Most Inexcusable Business Failures of the Last Twenty-five YearsРейтинг: 4.5 из 5 звезд4.5/5 (52)
- The Introverted Leader: Building on Your Quiet StrengthОт EverandThe Introverted Leader: Building on Your Quiet StrengthРейтинг: 4.5 из 5 звезд4.5/5 (35)
- Work Stronger: Habits for More Energy, Less Stress, and Higher Performance at WorkОт EverandWork Stronger: Habits for More Energy, Less Stress, and Higher Performance at WorkРейтинг: 4.5 из 5 звезд4.5/5 (12)
- The 4 Disciplines of Execution: Revised and Updated: Achieving Your Wildly Important GoalsОт EverandThe 4 Disciplines of Execution: Revised and Updated: Achieving Your Wildly Important GoalsРейтинг: 4.5 из 5 звезд4.5/5 (48)
- The 12 Week Year: Get More Done in 12 Weeks than Others Do in 12 MonthsОт EverandThe 12 Week Year: Get More Done in 12 Weeks than Others Do in 12 MonthsРейтинг: 4.5 из 5 звезд4.5/5 (411)
- Unlocking Potential: 7 Coaching Skills That Transform Individuals, Teams, & OrganizationsОт EverandUnlocking Potential: 7 Coaching Skills That Transform Individuals, Teams, & OrganizationsРейтинг: 4.5 из 5 звезд4.5/5 (27)
- Get Scalable: The Operating System Your Business Needs To Run and Scale Without YouОт EverandGet Scalable: The Operating System Your Business Needs To Run and Scale Without YouРейтинг: 5 из 5 звезд5/5 (1)
- The Power of People Skills: How to Eliminate 90% of Your HR Problems and Dramatically Increase Team and Company Morale and PerformanceОт EverandThe Power of People Skills: How to Eliminate 90% of Your HR Problems and Dramatically Increase Team and Company Morale and PerformanceРейтинг: 5 из 5 звезд5/5 (22)
- The 12 Week Year: Get More Done in 12 Weeks than Others Do in 12 MonthsОт EverandThe 12 Week Year: Get More Done in 12 Weeks than Others Do in 12 MonthsРейтинг: 4.5 из 5 звезд4.5/5 (90)
- Summary: Choose Your Enemies Wisely: Business Planning for the Audacious Few: Key Takeaways, Summary and AnalysisОт EverandSummary: Choose Your Enemies Wisely: Business Planning for the Audacious Few: Key Takeaways, Summary and AnalysisРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Sustainability Management: Global Perspectives on Concepts, Instruments, and StakeholdersОт EverandSustainability Management: Global Perspectives on Concepts, Instruments, and StakeholdersРейтинг: 5 из 5 звезд5/5 (1)
- Management Mess to Leadership Success: 30 Challenges to Become the Leader You Would FollowОт EverandManagement Mess to Leadership Success: 30 Challenges to Become the Leader You Would FollowРейтинг: 4.5 из 5 звезд4.5/5 (27)