Академический Документы
Профессиональный Документы
Культура Документы
Cours Asservissement L2
Загружено:
Naoufel FaresАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Cours Asservissement L2
Загружено:
Naoufel FaresАвторское право:
Доступные форматы
Rgulation & Asservissement
L2
SOMMAIRE
Chapitre1 : Systmes et signaux
1. Introduction
1
2. systmes commands
2
2.1. Dfinition
2
2.2. Exemple : Radiateur de chauffage central
2
2.3. roprits des systmes tudis
3
3. !ignaux typi"ues #fonctions de $ase%
&
3.1. !ignal sinuso'dal
&
3.2. Echelon
&
3.3. Echelon retard
(
3.&. )onction rampe
(
3.(. Impulsion de Dirac
(
Chapitre2 : Transformation de ap!a"e
1. Introduction
*
1.1. Dfinition
*
1.2. Intr+t
*
2. roprits de la ,ransforme de -aplace
*
2.1. .ondition d/existence
*
2.2. -inarit
*
2.3. ,horme de translation
*
2.&. ,ransforme de la dri0e d/une fonction
1
2.(. ,ransforme de l/intgrale
1
2.*. ,ransforme des fonctions a0ec retard
1
2.1. ,ransforme des fonctions priodi"ues
1
2.2. ,hormes
2
3. Rsolution d/une "uation diffrentielle par la ,.-.
3
&. ,ransformes de -aplace usuelles
14
Chapitre# : Mod$!isation des systmes
FARES Naoufel
Rgulation & Asservissement
L2
1. 5ise en "uation
11
2. 5odle mathmati"ue d/un systme
11
3. !ystmes mcani"ues
12
3.1. Elment ressort
12
3.2. Elment amortisseur
13
3.3. Elment d/inertie
1&
3.&. Impdance mcani"ue
1(
&. !ystmes lectri"ues
1(
&.1. Elment rsistance
1(
&.2. Elment inductance
1*
&.3. Elment capacit
1*
(. .ircuits composs
11
(.1. .ircuits lectri"ues composs
11
(.2. .ircuits mcani"ues composs
12
*. 6nalogie lectromcani"ue
13
*.1. 6nalogie directe
13
*.2. 6nalogie in0erse
24
Chapitre % : Systme du premier ordre
1. Dfinitions et exemples
22
1.1. Dfinition
22
1.2. Exemples
22
1.2.1. !ystme lectri"ue 22
1.2.2. !ystme mcani"ue 23
2. Rponses aux entres typi"ues
23
2.1. Rponse indicielle #Rponse 7 un chelon%
23
2.2. Rponse 7 une rampe
2*
2.3. Rponse 7 une impulsion
21
2.&. Rponse harmoni"ue : rponse aux entres sinuso'dales
22
2.&.1. Dfinition 23
2.&.2. Reprsentation graphi"ue de 8 et
en fonction de 23
FARES Naoufel
Rgulation & Asservissement
L2
69 -ieu de :ode 23
:9 -ieu de :lac; 31
.9 -ieu de <y"uist 31
3. !ystmes du premier ordre gnralis
32
&. systmes particuliers
33
&.1. Dri0ateur
33
&.1. Intgrateur
33
6nnexe n= 1 : 5thode des fractions rationnelles
3&
6nnexe n= 2 : Diagrammes de :ode d>un systme de 1
er
ordre
3(
Chapitre & : Systme du se"ond ordre
1. Dfinitions et exemples
3*
1.1. Dfinition
3*
1.2. Exemples
3*
1.2.1. .ircuit lectri"ue 3*
1.2.2. !ystme mcani"ue 31
2. Rponses aux entres typi"ues
31
2.1. Rponse indicielle
31
2.2. Rponse impulsionnelle
&4
2.3. Rponse harmoni"ue : rponse aux entres sinuso'dales
&1
2.3.1. ?ariation de 8 et
en fonction de &2
2.32. Reprsentation graphi"ue de 8 et
en fonction de &3
69 -ieu de :ode &3
:9 -ieu de <y"uist &&
.9 -ieu de :lac; &(
3. erformance des systmes du second ordre
&(
3.1. )acteur d>amortissement en rgime transitoire
&(
3.2. Dpassement en rgime transitoire
&*
3.3. 6mortissement et rponse fr"uentielle
&1
3.&. )r"uence remar"ua$les
&1
3.(. ,emps de rponse
&1
FARES Naoufel
Rgulation & Asservissement
L2
6nnexe n= 1 : Rponse indicielle et rponse impulsionnelle d>un systme de 2
me
ordre
&2
6nnexe n= 2 : Diagrammes de :ode d>un systme de 2
me
ordre
&3
Chapitre ' : Repr$sentation des systmes asser(is
1. systme asser0i
(4
1.1. Dfinition
(4
1.2. rincipaux lments d>une cha@ne d>asser0issement
(4
1.3. Rgulation et asser0issement
(1
2. )onction de transfert des systmes composs
(1
3. !chma )onctionnel
(2
3.1. )ormalisme
(2
3.1.1. -e $loc (2
3.1.2. -es sommateurs (2
3.1.3 -a Aonction (2
3.2. assage d/un systme d/"uations 7 un schma fonctionnel
(2
3.3. assage d/un !.) 7 un systme d/"uations
(3
3.&. Rgles de simplification des !.)
(&
3.&.1. !tructure en $oucle ou0erte (&
3.&.2. !tructure en $oucle ferme (&
3.&.3. Dplacement des points de prl0ement #des capteurs% ((
3.&.&. Dplacement des sommateurs ((
3.&.(. ,ransformation d/un comparateur en sommateur ((
3.&.*. ermutation des sommateurs ((
3.&.1. ermutation des capteurs ((
3.(. 6pplications
(*
3.(.1. 6pplication n= 1 (*
3.(.2. 6pplication n= 2 : $oucles concentri"ues (*
3.(.3. 6pplication n= 3 : $oucles im$ri"ues (1
3.(.&. 6pplication n= & : systme 7 deux entres et une sortie (2
&. dtermination prati"ue des lieux de transfert
(2
&.1. )onctions lmentaires
(2
FARES Naoufel
Rgulation & Asservissement
L2
&.2. !ystmes "uelcon"ues
*4
Chapitre ) : *erforman"e des systmes asser(is
1. !ta$ilit
*2
1.1. <otion de sta$ilit
*2
1.2. .ritre alg$ri"ue de sta$ilit
*2
1.3. Rgle de Routh
*3
1.&. .ritre graphi"ue de sta$ilit
*(
1.&.1. Dans le plan de <y"uist *(
1.&.2. Dans le plan de :ode **
1.&.3. Dans le plan de :lacB **
1.(. Degr de sta$ilit
*1
1.(.1. 5arge de gain *1
1.(.2. 5arge de phase *2
1.(.3. Exemple *3
2. prcision d>un systme asser0i linaire
*3
2.1. Dfinition
*3
2.2. .alcul d>erreur
14
2.3. Influence de la structure du systme asser0i sur la prcision
14
2.3.1. Rponse 7 un chelon : Erreur indicielle 11
2.3.2. Rponse 7 une rampe : Erreur de tra@nage 11
2.3.3. Rponse 7 une entre para$oli"ue : Erreur en acclration 11
2.3.&. ,a$leau rcapitulatif 12
2.&. .alcul de pour diffrents systmes
12
2.&.1. !ystme 7 retour non unitaire 12
2.&.2. !ystme 7 deux entres 12
SERIES +,E-ERCICES
FARES Naoufel
Rgulation & Asservissement
L2
Chapitre1 : Systmes et signaux
1. Introduction
Lautomatique est une doctrine qui rassemble plusieurs techniques et thories qui nous
permettent de contrler et de matriser le fonctionnement des procds rels. Lobjectif de
lautomatique est daboutir des systmes commande automatique.
Exemple : considrons lexemple dun moteur courant continu !."."# aliment par une
tension $ et tournant une %itesse.
Figure 1.1. Moteur courant continu
&our la m'me tension $ si on %arie la char(e) la %itesse %arie (alement. Le problme qui se
pose : comment conser%er la m'me %itesse quelque soit la %ariation de la char(e *
Solution : asser%ir le systme !."." + char(e# c,est--dire lui appliquer une tension % qui
tient compte de la %ariation de la %itesse selon une loi dtermine appele loi de commande.
"ette tension est (nre par lintermdiaire dun r(ulateur ou contrleur. .n aboutit au
systme asser%i sui%ant :
Figure 1.2. sser!issement du moteur courant continu
Le r(ulateur est choisi de fa/on a%oir un bon r(la(e. 0l fournit une tension % faible.
Lutilisation dun amplificateur de puissance est ncessaire pour a%oir la tension
dalimentation $.
1
est la %itesse de rfrence.
"onsidrons un procd rel que lon %eut transformer en un systme contrle automatique.
2uelles sont alors les diffrentes taches ncessaires faire *
FARES Naoufel
!."." "har(e
$
$
!."."
"har(e
3mplificateur
de puissance
4(ulateur
%
"apteur
1
Rgulation & Asservissement
L2
Figure 1.". Inter!ention de l#automati$ue
2. systmes command%s
2.1. &%'inition
5n systme physique mcanique) lectrique) thermique) 6# est un ensemble dlments
physique intera(issant entre eux. 7out systme prsente une ou plusieurs entres) une ou
plusieurs sorties. Lentre peut 'tre un si(nal dexcitation ou une perturbation.
Figure 1.(. Con'iguration g%n%rale d#un systme
2.2. Exemple : )adiateur de chau''age central
8ans une installation de chauffa(e central dune maison) chaque radiateur possde un robinet
qui permet de modifier le dbit deau chaude dans le radiateur en fonction de la temprature
souhaite dans la pice. Le systme physique) constitu du radiateur) du robinet et des
canalisations dentre et de sortie deau se prsente comme indiqu en fi(ure 9.:.
FARES Naoufel
!odlisation
&rocd rel
!ise en ;u%re
3nalyse et
identification
"onception et synthse
de r(ulation
<ystme <i(nal
dentre
<i(nal de
sortie
=xcitation
4ponse
&erturbation
Rgulation & Asservissement
L2
Figure 1.*. )adiateur de chau''age central
8un point de %ue fonctionnel) ce systme possde une entre) la commande x dou%erture du
robinet) une sortie) la temprature y de la pice ainsi quune loi qui relie lentre la sortie.
>ous notons ? la fonction qui relie la sortie y lentr x chaque instant. Le systme
physique de la fi(ure 9.: se prsente alors sous la forme du dia(ramme fonctionnel de la
fi(ure 9.@. Lintr't dune telle reprsentation est disoler le systme tudi et de mettre en
%idence son entre et sa sortie.
Figure 1.+. &iagramme 'onctionnel
2.". ,ropri%t%s des systmes %tudi%s
Le systme modlis par le dia(ramme de la fi(ure 9.@ possde plusieurs proprits :
- "est un systme mono!aria-le : il ne possde qune seule entre et une seule sortie.
- "est un systme d%terministe : pour une %olution donne de lentre xt#) il nexiste
quune %olution possible de la sortie yt#.
- "est un systme continu : la fonction ? est une fonction continue du temps t.
Les systmes tudis par la suite possderont ces proprits ainsi que les proprits de
linarit) de causalit et de stationnarit que nous dtaillons ci-dessous.
- 5n systme est lin%aire est tel que la fonction ? qui relie son entre et sa sortie est linaire.
3insi) pour toute entre x
9
t# et x
A
t#)
## t x ? . ## t x ? . ## t x . # t x . ? ) )
A A 9 9 A A 9 9 A 9
+ +
FARES Naoufel
?
y x
4obinet
commande x#
7emprature ambiante
sortie y#
4adiateur 3rri%e
eau chaude
Rgulation & Asservissement
L2
- 5n systme est causal est tel que la %aleur de sa sortie yt
1
# un instant t
1
ne dpend pas des
%aleurs de son entre xt# pour tBt
1
. "eci re%ient dire que la %aleur de la sortie ne peut
dpendre des %olutions futures de lentre. "ette proprit est toujours %rifie pour les
systmes physiques.
- 5n systme stationnaire ou systme in!ariant# est tel que ses caractristiques ne chan(ent
pas dans le temps ? est une fonction indpendante du temps#.
Lexemple de la fi(ure 9.: montre un systme non linaire puisque lentre x ne peut pas
prendre de %aleurs n(ati%es : en effet le robinet ne peut pas atteindre une position en de/ de
la position ferme. >anmoins) nous considrons que ce systme est linaire si son domaine
de fonctionnement normal reste dans ne r(ion oC il est linaire ou peu prs# linaire#. 8e
plus ce systme nest pas stationnaire puisque la temprature dans la pice est influence par
dautres facteurs que lou%erture du robinet) par exemple) la temprature de leau) le
rayonnement du soleil) la temprature extrieure6 "es diffrents facteurs correspondent
des perturbations qui %ont influencer notre systme et entraner une %aleur de la sortie
temprature dans la pice# diffrente de celle pr%ue. "est une caractristique (nrale des
systmes commands que d'tre sensible aux perturbations.
". Signaux typi$ues .'onctions de -ase/
"e sont les principaux si(naux dexcitations utiliss dans ltude des systmes dynamiques.
".1. Signal sinuso0dal
5n si(nal sinusoidal et# D e
1
sint# est caractris par son amplitude e
1
et par sa pulsation E
radFs#. <a frquence fGH# est telle que E D Af. <a priode 7s# %aut 7DAFE.
Les entres sinusoidales sont trs utilises pour tudier le comportement dynamique des
systmes. La sortie est) dans ce cas) appele r%ponse harmoni$ue.
".2. Echelon
et# D
'
<
1 t 1
1 t a
<i lamplitude est (ale 9 a D 9#) il sa(it dun chelon unitaire not ut#.
FARES Naoufel
et#
t
a
Rgulation & Asservissement
L2
La rponse dun systme un chelon sappelle r%ponse un %chelon) ou r%ponse indicielle
ou r%ponse unitaire si a D 9#. "e si(nal est utilis pour dterminer lerreur statique dun
systme) cest dire la diffrence entre la sortie souhaite et la sortie relle lorsque lentre
reste constante.
".". Echelon retard%
et# D u t I t
1
# D
'
<
1
1
t t 1
t t 9
".(. Fonction rampe
et# D
'
<
1 t 1
1 t t . a
.n note une rampe de pente a par rt# D a.t.ut#. La rampe est utile pour dterminer lerreur en
%itesse. 5ne rampe retarde scrit : et# D r t - t
1
# D a . t - t
1
# . u t - t
1
#
".*. Impulsion de &irac
"e si(nal not t# est une impulsion br%e) qui %aut Hro en tout point sauf au %oisina(e de t
D 1. Limpulsion de 8irac peut 'tre obtenue comme la limite dune famille de fonctions dont
la fi(ure ci dessous reprsente le trac.
a
t# D
'
> <
a t 1
a
9
a t ou 1 t 1
>ous %rifions que pour tout aB1)
9 dt # t
a
+
Limpulsion de 8irac est alors dfinie par : t# D +
1 a
lim
a
t#.
=lle %rifie aussi :
# t f dt # t t # t f
1 1
+
La rponse dun systme une impulsion de 8irac sappelle r%ponse impulsionnelle. La
connaissance de la seule rponse impulsionnelle suffit dfinir compltement le systme
tudi.
FARES Naoufel
9
t
1
et#
et#
pente D a
a
a
t#
t
9Fa
Rgulation & Asservissement
L2
Chapitre2 : 1rans'ormation de 2aplace
2. Introduction
2.1. &%'inition
"onsidrons une fonction f telle que ft# D 1 pour t J 1. La transforme de Laplace de ft# est
donne par :
?p# D L Kft#L D
1
t p
dt e # t f
1.2. Int%r3t
Lintr't de lutilisation de la fonction de Laplace est rsum dans le schma sui%ant :
L : 7ransforme de Laplace
L
-9
: 7ransforme de Laplace in%erse
3. Proprits de la Transforme de Laplace
2.1. Condition d#existence
1 e # t f
lim
pt
t
2.2. 2in%arit%
L K.f
9
t# + .f
A
t#L D .L Kf
9
t#L + .L Kf
A
t#L
2.". 1h%orme de translation
<i ?p# est la 7.L de ft# alors : L Ke
-at
ft#L D ?p + a#
2.(. 1rans'orm%e de la d%ri!%e d#une 'onction
FARES Naoufel
=quations
diffrentielle
s
=quations
al(briques
?onction de
transfert
4ponse
temporelle
<ystme
=tudier le
systme
L
L
-9
Rgulation & Asservissement
L2
L Kf t#L D
1
pt ,
dt e # t f
D
[ ]
1
pt
e # t f
+ p
1
pt
dt e # t f
D p L Kft#L I f1
+
#
&%ri!%e d#ordre 2 :
L Kf t#L D p
A
L Kft#L I p f1
+
# I
t
f
1
+
#
&%ri!%e d#ordre n :
L K
n
n
dt
# t f d
L D p
n
L Kft#L I Kp
n-9
f1
+
# + p
n-A
t
f
1
+
# +...+ p
A n
A n
t
f
1
+
# +
9 n
9 n
t
f
1
+
#L
2.*. 1rans'orm%e de l#int%grale
L K
()dM M f
t
1
4 5
( )
,
_
1
pt
t
1
dt e dM M f
5
( )
1
]
1
1
t
1
pt
dM M f e
p
9
6
( )
1
pt
dt e t f
p
9
.n suppose que :
( )
+
t
1 dM M f e
t
1
pt
et
( )
1 t
1 dM M f e
t
1
pt
3lors L 7
( )dM M f
t
1
L D
( )
1
pt
dt e t f
p
9
D ( )
9
L f t
p
1
]
Int%grale d#ordre n : L 7
( )dM M f ...
L D n
p
9
L Kft#L
2.+. 1rans'orm%e des 'onctions a!ec retard
LKf t - # ut - #L D e
-p
LKft#L
2.8. 1rans'orm%e des 'onctions p%riodi$ues
"onsidrons une fonction f priodique de priode 7 alors : ft + N7# D ft# O N entier#
?p# D LKft#L D
1
t p
dt e # t f
D
7
1
t p
dt e # t f
+
7 A
7
t p
dt e # t f
+ 6
D
7
1
t p
dt e # t f
+
+
+
7
1
# 7 t p
dt # 7 t f e
+ 6
D K9 + e
I p7
+ e
I p A 7
+ ...L
7
1
t p
dt e # t f
?p# D
dt e # t f
lim
pt -
7
1
N
+
?p# D p7
e 9
9
7
1
t p
dt e # t f
FARES Naoufel
et#
Rgulation & Asservissement
L2
)emar$ue : "onsidrons deux fonctions et# et ft# telles que f est la fonction priodique de
et#.
<oit =p# D L Ket#L et ?p# D L Kft#L
?p# D
1
pt
dt e # t f
D p7
e 9
9
7
1
pt
dt e # t f
.r pour 1 J t 7) ft# D et# 8onc ?p# D p7
e 9
9
=p#
<i on connat la transform de Laplace de la fonction principale dune fonction priodique) on
peut dduire facilement) connaissant la priode) la transforme de Laplace de la fonction
priodique.
2.9. 1h%ormes
a) Thorme de la valeur finale
# p ? p
lim
# t f
lim
1 p t
b) Thorme de la valeur initiale
# p ? p
lim
# t f
lim
# 1 f
p 1 t +
+
+
c) Thorme de diffrentiation
.n a :
1
pt
dt # t f e # p ?
) doC
1
pt
dt # t f e t
dp
# p d?
1
pt A
A
A
dt # t f e t
dp
# p ? d
1
pt P
P
P
dt # t f e t
dp
# p ? d
1
pt n
n
n
dt # t f e # t
dp
# p ? d
=t par suite
[ ] # t f # t L
dp
# p ? d
n
n
n
Exemple
# t u # t # 9 # t u t # t f
n n n
#
p
9
dp
d
# 9
dp
#L# t u K L d
# 9 #L t u # t K L # 9 #L t f K L
n
n
n
n
n
n n n
9 n
p
Q n
#L t f K L
+
FARES Naoufel
1
7
ft#
1
7 A7 P7
Rgulation & Asservissement
L2
Exercice
<oit la fonction sui%ante ft# D a cosEt# + b sinEt#.
8terminer L Kft#L et dduire la transforme de Laplace de la fonction (t# D t e
-t
ft#.
". )%solution d#une %$uation di''%rentielle par la 1.2.
"onsidrons un systme linaire dcrit par lquation diffrentielle :
=
9
# : # t e b
dt
# t e d
b
dt
# t e d
b # t s a
dt
# t s d
a
dt
# t s d
a
1
9 m
9 m
9 m
m
m
m 1
9 n
9 n
9 n
n
n
n
+ + + + + +
&ar application de la 7.L. lquation =
9
#) on aboutit lquation al(brique sui%ante :
=
A
# : <p# D Gp# . =p# + "p#
-
1 9
9 n
9 n
n
n
1 9
9 m
9 m
m
m
a p a ... p a p a
b p b ... p b p b
# p G
+ + + +
+ + + +
reprsente une relation directe entre lentre et la
sortie. "est ce quon appelle la 'onction de trans'ert.
- "p# est une fraction rationnelle en p dpendant des conditions initiales du systme.
- <p# D L Kst#L O s tant la sortie du systme.
- =p# D L Ket#L O e tant la sortie du systme.
Le premier terme caractrise le r(ime forc de la solution alors que le deuxime terme
caractrise le r(ime libre qui dpend des conditions initiales#
&our trou%er la solution de lquation =
9
#) on applique la transforme in%erse de Laplace
lquation =
A
#.
&%'inition : La transforme de Laplace in%erse note L
-9
) consiste retrou%er la fonction ft#
partir de sa transforme de Laplace ?p#. ft# D L
-9
K?p#L
=n (nral) la 7.L. de la solution de lquation diffrentielle scrit sous la forme :
# p 8
# p >
# p <
oC > et 8 sont des polynmes en p tels que le de(rs de 8 est suprieur
celui de >. 0l est donc possible de dcomposer <p# en lments simples dont les 7.L.0. sont
connues.
FARES Naoufel
9 A
Rgulation & Asservissement
L2
Exemple :
# R p # A p # A p
9
R p
9
R p
9
R # p
9
9@ p
9
# p <
A A A A A A R
+ +
R p
9
S
9
A p
9
PA
9
A p
9
PA
9
R p
d cp
A p
b
A p
a
# p <
A A
+
+
+
+
+
+
+
# t A sin A e
PA
9
e
PA
9
#L p < K L # t s
t A t A 9
Exercice
8terminer la solution de lquation diffrentielle sui%ante :
y
"
+ 4y = sin(t a%ec les conditions initiales :
'
! ! ( y
! ! ( y
(. 1rans'orm%es de 2aplace usuelles
'.t/ u.t/ F.p/ '.t/ u.t/ F.p/
t I n7# e
-n7p
e
at
a p
9
+
N
p
N
n at
t e
( )
9 n
a p
Q n
+
Nt
A
p
N
# Et sin
A A
E p
E
+
n
t
9 n
p
Q n
+
# Et cos
A A
E p
p
+
Chapitre" : Mod%lisation des systmes
1. Mise en %$uation
Ltude mathmatique dun systme physique consiste une fois prciser les hypothses :
- le mettre en quations)
- tudier son comportement en tudiant ses quations.
FARES Naoufel
Rgulation & Asservissement
L2
Le premier de ces points mise en quations ou modlisation mathmatique# est trs important
et doit 'tre men a%ec soin car il %a fixer le modle mathmatique du systme tudier. Le
but de cette modlisation est donc da%oir un systme dquations qui reprsente le
comportement dynamique du systme et qui peut 'tre rsolu pour dterminer la rponse du
systme aux diffrents types dexcitation.
"es quations sont obtenues en appliquant chaque lment du systme les lois de la
physique qui le r(issent : loi dlectricit) lois de la thermodynamique6
5ne des difficults de lautomaticien est dobtenir un modle du systme suffisamment juste
pour reflter le comportement rel sans que ce modle soit trop complexe car il serait alors
trop lourd manipuler et donc inexploitable. 5n compromis doit 'tre ralis entre la prcision
du modle et sa simplicit.
2. Modle math%mati$ue d#un systme
>ous nous limitons dans ce qui suit ltude des systmes mono%ariables dont le
comportement est r(i par une quation diffrentielle linaire coefficients constants.
La majorit des systmes physiques sont dcrits par des quations diffrentielles reliant les
entres aux sorties.
Le modle mathmatique est de la forme :
# t e b
dt
# t e d
b
dt
# t e d
b # t s a
dt
# t s d
a
dt
# t s d
a
1
9 m
9 m
9 m
m
m
m 1
9 n
9 n
9 n
n
n
n
+ + + + + +
<i les coefficients a
i
et b
j
sont constants) le systme est lin%aire in!ariant stationnaire.
Le nombre n reprsente lordre du systme. Les systmes physiquement ralisables) %rifient
lin(alit n m. >ous dirons alors que le systme est causal.
FARES Naoufel
st#
<ystme
et#
entre sortie
Rgulation & Asservissement
L2
5n systme peut 'tre aussi reprsent par sa fonction de transfert note T et exprime par :
# t e
# t s
T
.
". Systmes m%cani$ues
Les lments mcaniques principaux utiliss dans la modlisation dun systme mcanique
sont : la masse) le ressort et lamortissement. "es lments peu%ent 'tre rencontrs dans le
systme ayant un mou%ement de translation ou de rotation. Les si(naux dentre possibles
peu%ent 'tre la force) le moment6
".1. El%ment ressort
&our un ressort idal masse n(li(eable et mou%ement linaire#) lallon(ement ou la
compression est directement proportionnel la force applique.
? D N lon(ueur finale I lon(ueur initiale# O N : raideur >Fm#
&our un ressort en rotation) on a la relation : 7 D N
Le ressort peut 'tre reprsent par le schma fonctionnel sui%ant oC la force est considre
comme entre et llon(ation comme sortie.
T tant la fonction de transfert du ressort :
N
9
?
x
e
s
T
&%'inition1 : La rponse frquentielle ou harmonique dun systme est sa rponse st# quand
lexcitation et# est un si(nal sinusoUdal.
&our le ressort : et# D ?t# D ?
1
sinEt# et st# D xt# D
N
?
1
sinEt#.
FARES Naoufel
T
st# et#
? D N x
x
l
!
?
7 : moment appliqu
: %ariation an(ulaire
sortie
4essort
entre
?
x
T
x
?
Rgulation & Asservissement
L2
&%'inition2 : .n appelle rapport damplitude) not 4.3) le rapport des amplitudes des si(naux
de sortie et dentre correspondant la rponse frquentielle.
4.3 D
e
s
D
T
: cest aussi le module de la fonction de transfert.
&our le ressort : 4.3 D
N
9
&%'inition" : .n appelle dphasa(e dun systme dynamique) not ) la diffrence de phase
entre le si(nal du sortie et le si(nal dentre correspondant la rponse frquentielle. 0l
correspond lar(ument de la fonction de transfert.
8phasa(e D D phase K st# L I phase K et# L D ar( T#.
&our le ressort : D 1 O la sortie et lentre sont en phase.
".2. El%ment amortisseur
.n dit quil y a un effet damortissement dans un systme mcanique si lner(ie fournie au
systme nest pas totalement conser%e. Lner(ie perdue est une ner(ie dissipe due
lexistence du frottement. &our un amortissement %isqueux) la force ra(issant contre le
mou%ement est proportionnelle la %itesse de dplacement.
"ette force peut sexprimer par : ? D V
dt
dx
) x tant le dplacement m#.
8ans la suite) on %a introduire la notation sui%ante :
8 D
dt
d
: .prateur de diffrentiation 8 x D
dt
dx
#
dt
8
9
: .prateur dint(ration
dt x
8
x
#
La %itesse scrit alors : % D 8 x et la force : ? D V 8 x
Lamortisseur peut 'tre reprsent par le schma fonctionnel sui%ant oC le dplacement est
considr comme entre et la force comme sortie.
FARES Naoufel
sortie
V 8
entre
x
?
T
x
?
V : constante damortissement >.secFm#
% : %itesse de dplacement mFsec#
? D V %
Rgulation & Asservissement
L2
T tant la fonction de transfert de lamortisseur :
8 V
x
?
e
s
T
)%ponse 'r%$uentielle : soit xt# D x
1
sinEt#
? D V 8 x D V
dt
dx
?t# D V x
1
E cosEt# D V x
1
E sinEt+
A
#
)apport d#amplitude : 4.3 D
x
?
D V E D fE# : fonction de la frquence E
&%phasage : D phase K ?t# L I phase K xt# L D
A
&%'inition : la fonction de transfert sinusoUdale est obtenue en rempla/ant loprateur 8 par
jE oC j
A
D -9#.
.n a : T8# D V 8) alors Tj E# D V j E D j V E
"est une expression complexe de module
T
D V E et dar(ument D ar( T# D
A
. &our
la rponse frquentielle) le dphasa(e D ar( KTj E#L et le rapport damplitude 4.3 D
# jE T
".". El%ment d#inertie
&our les systmes en translation) llment dinertie est la masse alors que pour les systmes
en rotation) llment dinertie est le moment dinertie.
La loi fondamentale de la dynamique snonce : la somme des forces a(issant sur un corps de
masse m est (ale au produit de sa masse par son acclration.
m ? ?
e x 8 m
dt
x d
m ?
A
A
A
Le schma fonctionnel est :
La fonction de transfert T est :
A
8 m
9
?
x
e
s
T
FARES Naoufel
4.3
E E
FA
A
8 m
9 ?
x
7 D moments extrieurs
W D moment dinertie
D %ariation an(ulaire
Rgulation & Asservissement
L2
&our les systmes en rotation) on a :
A
A
dt
d
W 7
)%ponse 'r%$uentielle : .n a :
A
8 m
9
# 8 T
) donc
A A
E m
9
E# j m
9
# E j T
=t par suite 4.3 D
A
E m
9
TjE#
et D ar( KTj E#L D -
)emar$ue : si et# D e
9
sin Et +
9
# + e
A
cos Et +
A
#) alors :
st# D 4.3 e
9
sin Et +
9
+ # + 4.3 e
A
cos Et +
A
+ #.
".(. Imp%dance m%cani$ue
Limpdance mcanique dun systme est le rapport dynamique entre la force et la %itesse.
<oit :
%
?
# 8 X
8
N
X
ressort
O
V X
r amortisseu
O
8 m X
masse
(. Systmes %lectri$ues
Les trois lments fondamentaux sont : la rsistance) linductance et la capacit.
(.1. El%ment r%sistance
La loi dohm scrit :
i
e e
4
A 9
Le schma fonctionnel est :
Limpdance lectrique est le rapport dynamique entre la tension et le courant)
i
e
X
&our la rsistance : X
4
D 4
(.2. El%ment inductance
FARES Naoufel
4.3
E
E
-
4
i
e
9
e
A
sortie
4
entre
i
e
L
i
e
9
e
A
e
L 8
i
e
Rgulation & Asservissement
L2
Le fonctionnement dun lment inductance est r(it par lquation dynamique :
dt
di
L e e
A 9
<oit : e D L 8 i KL : en Genry G#L
Le schma fonctionnel est :
)%ponse 'r%$uentielle : .n a : L8
i
e
# 8 T ) donc
jLE # E j T
=t par suite 4.3
LE # E j T
et D ar( KTj E#L D
A
(.". El%ment capacit%
La diffrence de potentiel aux bornes dune capacit est : dt i
c
9
e e e
A 9
<oit : e D
c8
9
i Kc : en ?arad ?#L
Le schma fonctionnel est :
)%ponse 'r%$uentielle : .n a :
c8
9
i
e
# 8 T donc
jcE
9
# E j T
=t par suite 4.3
cE
9
# E j T et D ar( KTj E#L D -
A
*. Circuits compos%s
FARES Naoufel
4.3
E E
FA
c
i
e
9
e
A
e
4.3
E
E
-
c8
e
i
i
e
c8
9
ou
Rgulation & Asservissement
L2
5n circuit compos est un circuit form par lassociation srie etFou parallle dlments
simples.
*.1. Circuits %lectri$ues compos%s
&our crire les quations r(issant le fonctionnement dun circuit lectrique) on lui applique
les lois de Yirchhoff.
2oi des mailles : 5
N
t# D 1
2oi des n:uds : i
N
D 1
Exemple1 : dterminer les quations qui r(issent le fonctionnement du circuit sui%ant.
Loi des mailles :
!aille9 : 1 dt # i i
c
9
i 4 e
A 9 9 9
!ailleA : 1
dt
di
L i 4 dt # i i
c
9
A
A A A 9
Loi des n;uds :
>;ud %
9
:
1
4
% %
dt
d%
c
4
% e
A
A 9 9
9
9
>;ud %
A
:
1 dt %
L
9
4
% %
A
A
A 9
Exemple2 : circuit 4-L-"
9- 8terminer la fonction de transfert du circuit 4-L-" sui%ant si la tension e est considre
comme entre et la tension % comme sortie.
Loi des mailles : %
dt
di
L 4i e + +
8autre part :
dt
d%
c i idt
c
9
%
8oC : %
dt
% d
Lc
dt
d%
4c e
A
A
+ +
3%ec loprateur 8 on a : % # 9 4c8 Lc8 e % 4c8% % Lc8 e
A A
+ + + +
La fonction de transfert est :
A
Lc8 4c8 9
9
# 8
e
%
# 8 T
+ +
A- 8terminer limpdance lectrique qui%alente du circuit 4-L-"
i
e
X
e
.
FARES Naoufel
4
9
e
4
A
c
L
i
9
i
A
%
9
%
A
4
e
c
i
%
L
Rgulation & Asservissement
L2
+ + idt
c
9
dt
di
L 4i e
i
c8
9
L8i 4i e + +
i #
c8
9
L8 4 e + +
c8
9
L8 4
i
e
X
e
+ +
P- 8terminer la fonction de transfert du circuit 4-L-" si e est lentre et i est la sortie
A
A Lc8 4c8 9
c8
X
9
# 8
e
i
# 8 T
+ +
*.2. Circuits m%cani$ues compos%s
&our dterminer les quations dun systme mcanique) on lui applique la relation
fondamentale de la dynamique 4?8.
Exemple : appliquer la 4?8 au systme mcanique sui%ant.
&our m
9
:
A
9
A
9 A 9 A 9 9
dt
x d
m # x x N x N
<oit : 1 x N x # N N
dt
x d
m
A A 9 A 9
A
9
A
9
+ +
&our m
A
:
A
A
A
A
A
9 A A
dt
x d
m
dt
dx
V # x x N ?
<oit : ? x N x N
dt
dx
V
dt
x d
m
9 A A A
A
A
A
A
A
+ +
Exemple2 : le systme sui%ant reprsente le frottement %isqueux f d%eloppant une force
proportionnelle la %itesse %) (ale f
dt
dx
D f %
9- 8terminer la fonction de transfert de ce systme si la force ? est considre comme entre
et le dplacement x comme sortie.
=quation du mou%ement : ? Nx
dt
dx
dt
x d
m
A
A
+ + f
8oC : ? Nx 8x x m8
A
+ + f
La fonction de transfert est :
N 8 m8
9
# 8
?
x
# 8 T
A
+ +
f
A- 8terminer limpdance mcanique qui%alente ce systme
%
?
X
m
.
FARES Naoufel
4
e
c
i
L
e
i
X
e
"
F
#
$
m
$
%
$
#
2
m
$
%
2
Rgulation & Asservissement
L2
.n a : N 8 m8 # 8
x
?
A
+ + f et 8Z
dt
dx
%
8oC :
8
N
m8
%
?
X
m
+ + f
Chapitre ( : Systme du premier ordre
FARES Naoufel
p 9
Y
# p T
+
E(& S(&
R
i
' e(t
s(t
Rgulation & Asservissement
L2
1. &%'initions et exemples
1.1. &%'inition
.n appelle systme du premier ordre d,entre e(t et de sortie s(t) un systme dont le
fonctionnement est r(i par une quation diffrentielle du type :
# #
1 1 9
t e " t s A
(t
(s
A +
3%ec : A
$
) A
!
et "
!
sont des constantes
.u sous la forme :
# # t e ) t s
(t
(s
+
1
9
A
A
est appele constante de temps du systme unit : se*#.
1
1
A
"
)
est le gain stati$ue du systme ou (ain en r(ime permanent unit de
e
s
#.
La fonction de transfert d,un tel systme est +(& :
&
)
& E
& S
& +
+
9 #
#
#
1.2. Exemples
1.2.1. Systme %lectri$ue
"ircuit R'
Lquation diffrentielle de ce circuit est :
# # # # t s
(t
(s
R' t s t i R t e + +
"est un systme de premier ordre a%ec ) = $ et
= R')
<a fonction de transfert est :
& R'
& +
+
9
9
#
"ircuit LR
Lquation diffrentielle du circuit est :
# # # # t s
(t
(s
R
L
t s t i L t e + +
FARES Naoufel
4
e(t
s(t
L
i
Rgulation & Asservissement
L2
"est un systme de premier ordre a%ec ) = $ et
R
L
,
)
<a fonction de transfert est :
&
R
L
& +
+
9
9
#
1.2.2. Systme m%cani$ue
4?8 :
-
(
" '
dt
Lquation diffrentielle du systme est
"
'
(t
(
"
-
+
"est un systme de premier ordre a%ec
"
'
)
et
"
-
)
<a fonction de transfert est :
&
"
-
"
& +
+
9
9
#
2. )%ponses aux entr%es typi$ues
2.1. )%ponse indicielle .)%ponse un %chelon/
8ans ce cas lentre est l,chelon e(t damplitude a
et# D
'
<
! t !
! t E
!
et
&
E
& E
!
#
<upposons que la condition initiale s(! = ! et considrons un systme du premier ordre de
fonction de transfert
&
)
& E
& S
& +
+
9 #
#
#
.
La rponse un chelon damplitude a est :
& $
"
&
A
& $ &
E )
& S
!
+
+
+
#
#
=n utilisant la mthode des fractions rationnelles K%oir 3nnexeL) on trou%e :
!
)E A
et
!
E ) "
.
"e qui nous permet ,crire :
# - #
& $ &
$
)E & S
!
La transforme de Laplace in%erse donne
9
L
# #. # t u e $ E ) t s
t
!
FARES Naoufel
' : "ouple moteur
" : "oefficient de frottement %isqueux
: $itesse an(ulaire de rotation
!
e(t
E
!
t
-
'
"
(
(t
Rgulation & Asservissement
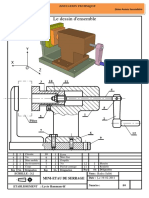
L2
?inalement)
li.re rgime
e )E
for* rgime
E ) t s
t
! !
#
pour 1 t
Figure(.1. Rponse un chelon d'un systme du premier ordre
&our un chelon unitaire E
!
= $# on a
,
_
t
e ) t S 9 #
Figure(.2. Rponse un chelon unitaire d'un systme du premier ordre
Caract%risti$ues de la r%ponse
rreur en r!ime permanent" ",est l,erreur entre l,entre e(t et la sortie s(t quand
t
.n a : (t = e(t / s(t0 d,oC ! ! !
t
E ) $ )E E t # # lim
3 partir du thorme de la %aleur finale :
## # lim # lim & S & E & & &
! & ! &
La tan!ente de la courbe l'ori!ine coupe l'a#e $
%
&s&)) t '
FARES Naoufel
s(t
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
s(t
0
1
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 tr = 1
234
+34
Rgulation & Asservissement
L2
La constante de temps caractrise la rapidit du r(ime transitoire plus diminue plus le
r(ime transitoire est faible#. La tan(ente l,ori(ine a une pente de
!
)E
.
(aleurs particulires
t #
#
t
!
e $
)E
t s
e
$
$ !051
2
2
e
$
$ !065
1
1
e
$
$ !073
Le temps de rponse )*
&our chiffrer en pratique la dure du translation) on considre habituellement le temps de
rponse t 3 4. "est le temps au bout duquel le systme atteint les 734 de sa %aleur finale.
Le temps de rponse 34 est tr= 1.
Figure(.". Le temps de rponse )* d'un systme du premier ordre
2.2. )%ponse une rampe
L,entre est une rampe de pente a : e(t = a8t8u(t. <a 7ransforme de Laplace est
[
#
&
$
& E
<upposons que la condition initiale s(! = ! et considrons un systme du
premier ordre de fonction de transfert
&
)
& E
& S
& +
+
9 #
#
#
La rponse une rampe de pente a est :
& $
'
&
"
&
A
& $ &
a )
& S
2
+
+ +
+
[ #
#
FARES Naoufel
Rgulation & Asservissement
L2
3%ec la mthode des fractions rationnelles K3nnexeL) on trou%e :
[ O )a ' et )a " a ) A
"e qui nous permet ,crire :
& $
)a
&
)a
&
)a
& S
+
+ +
[
[
#
La transforme de Laplace in%erse donne
9
,
_
+
# # $ e t a ) t s
t
3prs un certain temps
1
t
e
et
,
_
$
t
a ) t s t s
&er
# #
: c,est l,quation d,une
droite
Figure(.(. Rponse d'un systme du premier ordre une rampe
Caract%risti$ues de la r%ponse
3prs un certain temps
1
t
,
_
$
t
a ) t s t s
&er
# #
: ",est l,quation d,une droite
Les diffrentes asymptotes
,
_
$
t
a ) s
&er
# coupent l,axe des temps en t =.
)a, )at $ ( s e 9
&er &er
+
<i ) = $
*te a, 9
&er
O la sortie s(t suit l,entre e(t a%ec un retard constant .
FARES Naoufel
) : $
) = $
) ; $
Rgulation & Asservissement
L2
<i ) $
#
&er
9
O s
&er
(t et e(t n,ont pas la m'me pente. 0ls di%er(ent.
2.". )%ponse une impulsion
L,entre est donne par e(t = E
!
(t. <a transforme de Laplace est E(& = E
!
. La sortie est
donne par :
t
! !
e
E )
t s
& $
E )
& S
+
.
#
.
#
Figure(.+. Rponse d'un systme du premier ordre une impulsion
)emar$ue : la rponse l,impulsion est qui%alente la rponse du systme lorsqu,il est
soumis uniquement la condition initiale
!
E )
! s
.
# essai de \L]cher\#.
2.(. )%ponse harmoni$ue : r%ponse aux entr%es sinuso0dales
"onsidrons un systme du premier ordre dfini par sa fonction de transfert :
& $
)
& +
+
#
. Lquation diffrentielle :
# # t e ) t s
(t
(s
+
.
La rponse harmonique est la rponse en r(ime permanent suite une excitation sinusoUdale
e(t. <oit
t e t e
!
sin #
. 3lors)
# sin . # + t e RA t s
!
.
8onc dterminer s(t re%ient calculer RA et
.
RA D + (ain# D
# < +
D
2 2
$
)
+
( ) # # ar( ar*tg < =
.n remarque que + et
sont fonctions de
. .n appelle courbe de rponse en frquence
les courbes) en fonction de
) reprsentant + et
.
FARES Naoufel
Rgulation & Asservissement
L2
+omportement de , et
au# hautes fr-uences
O ! + )
2
+omportement de , et
au# basses fr-uences
! O ) + )
!
Pour
$
.
2 ) +
et
4
*
$
: &ulsation de coupure onde de cassure#
Figure(.8. +ourbe de rponse en fr-uence d'un systme du premier ordre
2.(.1. &%'inition
.n dfinit le (ain en dcibel par : +
("
= 2! log
$!
(+
# lo( lo(
2 2
("
2 2
$ $! ) 2! +
$
)
+
+
+
<i ) = $ O +
("
= # lo(
2 2
$ $! +
Pour les hautes fr-uences :
# lo( 2! + $
("
>>
+
("
tend %ers une droite qui est une asymptote %ers les hautes frquences.
Pour les faibles fr-uences :
! + $
("
<<
$ers les faibles frquences) on a une droite asymptotique +
("
= !.
2.(.2. )epr%sentation graphi$ue de , et
en 'onction de
/0 Lieu de 1ode : on appelle lieu de Vode les courbes d,amplitude de (ain# et de phase en
fonction de la pulsation en chelle semi-lo(arithmique
#
lo(
f +
("
: "ourbe de (ain
# de(#
lo(
f
: "ourbe de
phase
lo(
%eut dire que l,axe des abscisses est (radu en lo(.
FARES Naoufel
+
0
0 3 4 5 6 7 8
*
)
)>2
*
F 4
F 2
Rgulation & Asservissement
L2
"ourbe d,amplitude : .n a %u que la courbe d,amplitude prsente A asymptotes : +
("
= !0
pour les faibles frquences et
lo( lo( 2! 2! +
("
) pour les hautes frquences. "es
deux asymptotes se coupent au point
! +
$
("
)
#.
Figure(.9. +ourbe de !ain &$ ' 2)
lo( lo( 2! 2! +
("
&our
$ (" $ $
2! 2! + lo( lo(
&our
2 (" 2 2
2! 2! + lo( lo(
<i
(" 5 2 2! + + 2
(" $ (" 2 $ 2
lo(
<i on double la frquence) le (ain chute de -@db. .n dit que la pente est (ale -@dVFocta%e.
<i
(" 2! + + $!
(" $ (" 2 $ 2
La pente est aussi (ale -A1 dVFdcade. "ette pente sera note -9.
&our
$
) on a :
#
$
+ # $
2
+
("
= 21(".
)emar$ue : si ) $#) la courbe d,amplitude se dduit de la courbe correspondant ) = $#
par une translation %erticale %ers le haut ou %ers le bas# de 2! log).
FARES Naoufel
$
2
(" $ (" 2
2! + +
lo(
$
2
= 2
$
5 ("
21
+
("
!
3
Rgulation & Asservissement
L2
Figure(.;. +ourbe de !ain &$ 2)
"ourbe de phase :
<i alors ! !
O
<i alors 7!
.
L,allure de la courbe est celle de l,arctan(ente a%ec un point d,inflexion pour
*
$
.
Figure(.1<. +ourbe de phase
10 Lieu de 1lac$ : c,est un re(roupement des deux courbes de Vode sur le m'me (raphe. La
courbe obtenue est paramtre en
et oriente dans le sens des
croissants.
FARES Naoufel
+
("
!
3
+
("
243? 27!?
2! log) 2 1
2! log)
*
= !
Rgulation & Asservissement
L2
Figure(.11. Lieu de 1lac4 d'un systme de premier ordre
+0 Lieu de 5y-uist : dans ce lieu) on trace l,ensemble des points de la fonction =(< dans un
plan complexe. "e lieu est (radu en
et orient dans le sens des
croissantes.
y < %
$
)
<
$
)
< $
)
< =
2 2 2 2
+
+
#
et
en 'onction de
.n peut montrer que ce lieu est un demi-cercle de rayon de )>2.
". Systmes du premier ordre g%n%ralis%
"e sont des systmes dont le comportement dynamique est r(i par une quation diffrentielle
de la forme :
#
(t
(e
e # y
(t
(y
2 $
+ +
a%ec :
Fonction de trans'ert :
#
#
2
$
# $ &
= &
$ &
+
)%ponse 'r%$uentielle :
#
#
2
$
) $ <
= <
$ <
+
Le (ain est :
#
#
2
2
2
$
$
+ #
$
+
+
) la phase est :
# #
2 $
ar*tg ar*tg
)emar$ue
<i
!
$ 2
> >
: <ystme du $
er
ordre (nralise a%ance de phase.
<i
!
$ 2
< <
: <ystme du $
er
ordre (nralise retard de phase.
FARES Naoufel
) : (ain statique
: 9
er
constante du temps
: A
eme
constante du temps
)>2
Re(=(<
@m(=(<
=!
! )
+(
Rgulation & Asservissement
L2
Le rapport
$
2
est appel facteur d,a%ance de phase
Exemple1 :
#
#
# #
2 2 $
$ 2
2 $ 2
$ $ 2
R R $ R 'A y
A
$ R R
e
R R R $ 'A
$ R 'A R R
+
+ + +
+ +
#
(t
(e
e # y
(t
(y
2 $
+ +
3%ec :
$ 2
$
$ 2
R R '
R R
+
)
2 $
R '
et
2
$ 2
R
#
R R
+
2 $
$ 2
R
$ $
R
+ >
<ystme a%ance de phase.
Exemple2 :
#
$ 2 2
(y (e
R R ' y e R '
(t (t
+ + +
3%ec :
#
$ $ 2
R R ' +
)
2 2
R '
et # = $
2 2
$ $ 2
R
$
R R
<
+
<ystme retard de phase.
(. systmes particuliers
(.1. &%ri!ateur
",est un systme du $
er
ordre particulier dont la fonction de transfert est :
# .
(e
= & # & y #
(t
Exemple : circuit R'
#
R'&
= &
$ R'&
+
<i on peut raliser la condition R'& :: $) ce qui a lieu en r(ime harmonique a%ec :
# .
$
= & R' &
R'
<< ;
(.1. &%ri!ateur
",est un systme du 9
er
ordre particulier dont la fonction de transfert est :
# #
#
= & y # e t (t
&
FARES Naoufel
R
'
e
y
R
$
R
2
'
e
y
R
$
R
2
'
e
y
Rgulation & Asservissement
L2
Exemple : circuit RL
#
R
= &
R L&
+
<i on peut raliser la condition R :: L&) ce qui a lieu en r(ime sinusoUdal a%ec :
# .
R R $
= &
L L &
>> ;
FARES Naoufel
R e y
L
Rgulation & Asservissement
L2
nnexe n= 2
&iagrammes de >ode d?un systme de 1
er
ordre
FARES Naoufel
Rgulation & Asservissement
L2
Chapitre * : Systme du second ordre
1. &%'initions et exemples
1.1. &%'inition
5n systme de second ordre) d,entre e(t et de sortie s(t) est un systme dont le comportement
dynamique est dcrit par une quation diffrentielle de la forme :
# #
2
2 $ ! ! 2
( s (s
" " " s t A e t
(t (t
+ +
3%ec : "
2
) "
$
) "
!
et A
!
sont des constantes. <es caractristiques dynamiques sont :
2e gain stati$ue :
!
!
A
#
"
,ulsation propre non amortie ou pulsation naturelle :
!
!
2
"
"
note aussi
n
ra(>s##
Facteur d#amortissement :
.
$
! 2
"
B
2 " "
not aussi :
#
4elation entre B et
!
:
$
! !
" 2 C
"
La forme usuelle de lquation diffrentielle d,un systme du second ordre scrit alors :
2
2 2
! !
( s $ 2 B (s
s )e
(t (t
+ +
<a fonction de transfert est :
#
#
#
2
! !
S & #
+ &
E &
2 B &
$ &
_
+ +
,
1.2. Exemples
1.2.1. Circuit %lectri$ue
# #
$
'A
s t e t
$
R LA
'A
+ +
8,oC :
2
2
( y (y
L' R' y e
(t (t
+ +
<oit :
!
$
L'
) # = $)
R '
B
2 L
FARES Naoufel
R
e
*
y
L
Rgulation & Asservissement
L2
1.2.2. Systme m%cani$ue
4?8 :
2
2
( % (%
m " #% f
(t (t
+ +
# #
2
2
m ( % " (% $
% t f t
# (t # (t #
+ +
8,oC le (ain statique est (al
$
)
#
) la pulsation naturelle est
!
#
m
et le facteur
damortissement %aut
.
$ "
B
2 m #
.
2. )%ponses aux entr%es typi$ues
2.1. )%ponse indicielle
Lentre est l,chelon et#D E
!
8 ut#
&
E
& E
!
#
.
<upposons que les conditions initiales sont nulles et considrons un systme du second ordre
de fonction de transfert +&#.
.
# #. #
!
2
2
! !
# E
S & + & E &
2B $
& $ & &
_
+ +
,
@aleurs initiale et 'inale :
.n a:
# lim . #
&
s ! & S & !
+
et # lim . #
2
&
(s
! & S & !
st
+
) d,oC le systme part de Hro
a%ec une %itesse initiale nulle tan(ente nulle l,ori(ine#.
8,autre part:
# lim . # .
!
& !
s & S & # E
&%termination de s.t/ :
&our dterminer st#) il faut dcomposer S&# en lments simples. .r puisquon a au
dnominateur un polynme de A
me
ordre) on a P cas tudier selon la nature de ses racines.
4acines de :
2
2
! !
2 B $
$ & & !
+ +
,
2
2
2 2
! ! !
B $ B $
_
,
a#
, ! B $ > >
systme amorti# : .n a alors deux racines relles distinctes &
$
et &
2
.
Les ples de S(& les Hros du dnominateur# sont :
FARES Naoufel
m
#
f(t
%
"
st#
2
2
! !
#
2 B $
$ & &
+ +
et#
Rgulation & Asservissement
L2
&
!
= ! O
2
$ ! !
& B B $ ! < et
2
2 ! !
& B B $ ! + <
8oC :
( ) ( )
#
!
$ 2 $ 2
#E A " '
S &
& & & & & & & & & &
+ +
La mthode des fractions rationnelles donne:
2
!
$ 2
#
A
& &
O
#
2
! !
$ $ 2
#E
"
& & &
et
#
2
! !
2 2 $
#E
'
& & &
8onc) on peut crire :
( )
#
# # # #
2 2 2
! ! ! ! ! !
$ $ 2 $ 2 2 $ 2 $ 2
#E #E #E
S &
& & & & & & & & & & & & &
+ +
La transforme de Laplace in%erse donne
9
L
#
2 $
2 & t & t
!
!
2
2 $
!
e e
s t #E $
& &
2 B $
_
_
+
,
,
?inalement O
{
r(ime permanet
r(ime transitoire
#
2 $
& t & t
! !
!
2
2 $
#E e e
s t #E
& &
2 B $
_
+
,
1 4 4 44 2 4 4 4 43
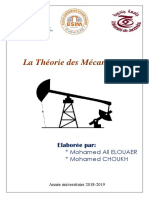
Figure*.1. Rponse un chelon d'un systme du second ordre amorti &672)
)emar$ue : &
$
et &
2
ont la dimension de lin%erse du temps) on pose alors :
$
2
$
! !
$ $
D
&
B B $
+
et 2
2
2
! !
$ $
D
&
B B $
D
$
et D
2
sont appeles les A constantes du temps du systme
( ) ( )
#
!
$ 2
#E
S &
& $ D & $ D &
+ +
#
$ 2
t t
D D !
! $ 2
2 $
#E
s t #E D e D e
D D
_
+
,
FARES Naoufel
t
#E
!
s
!
<econd
ordre
e s 9
er
ordre 9
er
ordre
D
$
D
2
s e
Rgulation & Asservissement
L2
-/
, ! B $
: 8ans ce cas) on a une racine double relle.
Les ples de S(& sont ! et
$ !
&
. .n posant : $
$ !
$ $
D
&
.
#
t
D
! !
t
s t #E #E $ e
D
_
+
,
Lallure de la rponse est sensiblement analo(ue au cas prcdent.
c/
9 H 1 , < <
systme sous-amorti# : .n a deux racines complexes conju(ues.
Les ples de S(& sont : &
!
= ! O
2
$ ! !
& B < B $ et
2
2 ! !
& B < B $ +
L,expression de la sortie est :
( )
# sin
!
B t
2
! ! !
2
e
s t #E #E $ B t
$ B
3%ec :
2
$ B
ar*tg
B
Figure*.2. Rponse un chelon d'un systme du second ordre
La priode des oscillations est :
&
2
&
!
2 2
D
$ B
Le 9
er
8passement en ^ est :
max
^#
!
2
!
S #E B
A $!!e%& $!!
#E
$ B
_
,
)emar$ue : si B = !) l,quation diffrentielle de%ient :
FARES Naoufel
Rgulation & Asservissement
L2
2
2
! ! 2
( s
s #E
(t
+
et
# sin
! !
s t #E $ t
2
1
_
+
1
,
]
:
",est l,oscillateur parfait de pulsation
!
aucune dissipation d,ner(ie#.
2.2. )%ponse impulsionnelle
Lentre est l,impulsion de 8irac : et#D t# E(& = $.
.n pose N D 9 pour simplifier les calculs.
#
#
2 2
! !
2 2
! !
S &
& 2 B & A &
+ +
4acines de :
2
2
! !
2 B $
$ & & !
+ +
a/ ,remier cas : A(& a deux racines relles distinctes &
$
et &
2
B ; $ : systme amorti#.
( ) ( )
,
2
2 2 2
! ! !
B B $
2
$ ! !
& B B $ ! < et
2
2 ! !
& B B $ ! + <
8oC :
( ) ( )
#
2
2 !
!
$ 2 $ 2
A "
S &
& & & & & & & &
_
+
,
La mthode des fractions rationnelles donne:
$ 2
$
A
& &
O " A et
( )
2
$ 2 !
& & 2 B $
8onc) on peut crire :
#
!
2
$ 2
$ $
S &
& & & &
2 B $
_
+
,
La solution temporelle est : ( )
#
$ 2
& t & t !
2
s t e e
2 B $
a%ec : &
$
: &
2
:!
Figure*.". Rponse impulsionnelle d'un systme du second ordre amorti &672)
a/ &euxime cas : A(& a deux racines complexes conju(ues B : $ : systme sous-amorti#.
FARES Naoufel
s(t(EnitFE
21
Rgulation & Asservissement
L2
#
#
2 2
! !
2 2 2 2 2 2
! ! ! ! !
S &
& 2 B & & B B
+ + + +
#
# #
2
!
2 2 2
! !
S &
& B $ B
+ +
mettre sous la forme :
#
2 2
& a
+ +
.n pose ( )
2 2 2
!
$ B
2
!
$ B et
!
a B
# .
#
!
2 2
2
S &
& a
$ B
+ +
La solution temporelle est : ( )
# sin
!
B t 2 !
!
2
s t e $ B t
$ B
.
Figure*.(. Rponse impulsionnelle d'un systme du second ordre sous0amorti
2.". )%ponse harmoni$ue : r%ponse aux entr%es sinuso0dales
"onsidrons un systme du second ordre dfini par sa fonction de transfert:
#
2
! !
#
+ &
2 B &
$ &
_
+ +
,
. Lquation diffrentielle est :
# #
2
2 2
! !
( s $ 2 B (s
s t # e t
(t (t
+ +
.
La rponse harmonique suite une excitation sinusoUdale
t e t e
!
sin #
est :
# sin . # + t e RA t s
!
.
8terminons RA et
.
FARES Naoufel
s(t
=n%eloppe exponentielle
t(s
&
2
!
2
D
$ B
Rgulation & Asservissement
L2
RA D + (ain# D
#
2 2
2
2
! !
)
+ <
2 B
$
_ _
+
, ,
( ) ar( #
! !
2 2 2
!
2
!
2B
2B
= < ar*tg ar*tg
$
2.".1. @ariation de , et
en 'onction de
+omportement de , et
au# basses fr-uences
!
<<
: + # et
!
2 B
+omportement de , et
au# hautes fr-uences
!
>>
:
2
!
+ #
,
et
$6!
8ans la 6one de moyennes fr-uences
- &our
!
alors
7!
- &our tudier la %ariation de +) il suffit de dterminer
(+
(
.
.n a :
F 1 2
2 2
2 2
2 2 2
! ! ! ! ! !
(+ $ 2 B 2 2 B 2 B
$ $
( 2
1
1
_ _ _
1 + +
1
1 1
, , ,
]
]
2
2
2
!
(+
! 2 $ 4 B !
(
_
+
,
et par suite :
2
2
2
!
$ 2 B
T admet un maximum si )
2
2
$ 2 B ! B ! G
2
> < ;
La pulsation de rsonance est
2
R !
$ 2 B .
<i
2
B
2
> ) T n,admet pas de maximum O on obtient une courbe monotone dcroissante.
<i B = $) le systme se dcompose en deux systmes du 9
er
ordre de constantes de temps
$ 2
!
$
.
2.".2. )epr%sentation graphi$ue de , et
en 'onction de
Lieu de 1ode : .n prend dans la suite ) = $.
"ourbe de phase
La phase est toujours n(ati%e et dcrot de !? /$6!? a%ec une chute brusque pour
!
=n basse frquence
!
<<
:
! !
: asymptote horiHontale
=n haute frquence
!
>> $6!
: asymptote horiHontale
FARES Naoufel
Rgulation & Asservissement
L2
&our
!
O
7!
Figure*.*. +ourbe de phase
o "ourbe d,amplitude
lo( lo(
2 2
2
(" 2
! !
2 B
+ 2! + $! $
1
_ _
1 +
1
, ,
]
- =n basse frquence : +
("
= ! asymptote horiHontale
- =n haute frquence
!
>>
: O lo( lo( lo(
2
2
(" $! $! ! $! 2
! !
+ ) + 2! 4! 4!
_
,
&our
lo( lo(
$ $(" ! $
+ 4! 4!
&our
lo( lo(
2 2 (" ! 2
+ 4! 4!
- <i
lo(
2 $ 2 (" $("
2 + + 4! 2 $2("
<i on double la frquence) le (ain chute de 2$2(.. La pente est (ale 2$2("Focta%e.
- <i
2 $ 2(" $("
$! + + 4!("
. La pente est aussi (ale 24!("Fdcade. "ette pente
sera note 22.
&our les hautes frquences) la courbe de (ain en ("# prsente une droite asymptotique de
pente 22.
Le dia(ramme asymptotique damplitude est form dune asymptote horiHontale
!
<
et
une asymptote de pente /$2 ("Focta%e. "es deux asymptotes se coupent
!
.
FARES Naoufel
lo(
2
2 (" $("
$
+ + 4!
?
2$6!
27!
!
(log
!
"ourbe asymptotique
B : $
B =$
B ; $
Rgulation & Asservissement
L2
Figure*.+. +ourbe de !ain &$ ' 2)
Lieu de 5y-uist
.n reprsente dans ce lieu la partie ima(inaire de +(< en fonction de sa partie relle. .n
retrou%e les diffrents points caractristiques :
R
pulsation de rsonance correspond +
ma%
!
pulsation propre intersection a%ec laxe des ima(inaires#
Figure*.8. Lieu de 5y-uist d'un systme de second ordre
FARES Naoufel
(log
B=!0G
B=$
B;$
B=!033
B=!01
"ourbe asymptotique
pente 24! (">(e*#
22
25
+
("
[ ]
0m # = <
[ ]
4e # = <
2!03 2$ !03 $
B;!0G
R
B=!0G
B:!0G
(
!
=(<
Rgulation & Asservissement
L2
Lieu de 1lac$
Figure*.9. Lieu de 1lac4 d'un systme de second ordre
". ,er'ormance des systmes du second ordre
Les performances d,un systme du A
me
ordre se mesurent essentiellment par ses (randeurs
caractristiques :
".1. Facteur d?amortissement en r%gime transitoire
L,amortissement d,un systme est caractrise par le facteur d,amortissement B.
o B = !) le systme est sans amortissement juste oscillant# cas thorique#
o B = $) l,amortissement est dit critique
o B ; $) systme hyperamorti pas d,oscillations#
o B : $) systme sous amorti oscillatoire amorti#
La fonction de transfert du systme a A ples complexes.
B est donn par : B = sin
! $ 2
HI HI
cos
2
& ! !
$ B
La rponse du systme est oscillatoire amortie a%ec un dpassement d,autant plus important
que B est petit.
FARES Naoufel
?
B=!0G
B=$
B=!033
B=!01
2! log #
27!
+
("
0
2$6!
!
@m
Re
&
Rgulation & Asservissement
L2
".2. &%passement en r%gime transitoire
Le dpassement en _F_ est dfinie par :
#
e% &er
)
&er
y y
A $!!
y
3%ec :
max min
ou
e%
y y y
et
&er !
y #e
La rponse temporelle d,un systme de A
me
ordre est :
# sin ##
!
B t
eo &
2
e
y t # $ t
$ B
3%ec :
2
$ B
ar*tg
B
(y
!
(t
cos # sin #
& & ! &
t B t
8,oC :
sin #
cos #
2
& &
& !
t
$ B
t B B
) soit :
&
t ) +
et par suite :
&
)
t
8onc) les instants oC y(t prsente un extremum sont donnes par : )
2
&
!
) )
t
$ B
"e qui donne :
sin #
2
B)
$ B
e% !
2
e
y #e $ )
$ B
_
+
,
=n rempla/ant :
sin # # sin #
) $ ) $ 2
) $ $ $ B
+ +
) on peut crire :
#
2
B)
e% &er ) $
$ B
&er
y y
$ e
y
+
&our ) = $) le 9
er
dpassement est :
#
2
B
$ B
$
A $!!e
)emar$ues :
9. Le dpassement ne dpend que de B.
A. pour B ; !0G le dpassement est infrieur 34. 8onc si on considre 34 comme ordre de
(randeur de la limite usuelle de prcision pour beaucoup de systmes mcaniques) on peut
conclure que pour !0G : B : 9) les oscillations ne sont pratiquement pas %isibles.
".". mortissement et r%ponse 'r%$uentielle
<i B ;;) le lieu de transfert >yquist# du systme tend %ers un demi cercle : Le systme
du A
me
ordre systme du 9
er
ordre.
FARES Naoufel
y
ma%
#e
!
y
min
A
$
A
2
A
1
y(t
t
$
t
2
t
1
t
Rgulation & Asservissement
L2
&our B : !0G) on a le phnomne de rsonance. 0l se produit la pulsation :
2
R !
$ 2 B
La rsonance est caractrise par le facteur de rsonance ou de surtension# 2 exprim par :
#
#
R
2
= < $
J
= < !
2 B $ B
".(. Fr%$uence remar$ua-les
Fr%$uence propre non amortie :
!
!
f
2
3 cette frquence le dphasa(e du systme est (ale -`1_) elle correspond au point
d,intersection du lieu de >yquist a%ec l,axe ima(inaire.
'r%$uence propre :
2 I
I !
f f $ B
2
",est la frquence des oscillations de la rponse temporelle.
Fr%$uence de r%sonance :
2 R
R !
f f $ 2 B
2
3 cette frquence) le (ain prsente un maximum
Fr%$uence de coupure :
'
'
f
2
.n appelle frquence de coupure @ dcibels) la frquence
'
f
) tel que
# #
(" ' ("
+ + ! 5
".*. 1emps de r%ponse
Le temps de rponse d,un systme est
le temps du quel pour une entre
chelon) sa rponse atteint sa %aleur
dfiniti%e 34 prs est reste ensuite
comprise entre 734 et $!34.
&our le facteur d,amortissement B donn
le temps de rponse t
r
est in%ersement
proportionnel
!
.
&our
!
donn) le t
r
%arie en fonction de
B.
t
r
est minimal pour B = !0G
nnexe n= 1
)%ponse indicielle et r%ponse impulsionnelle d?un systme de 2
me
ordre
FARES Naoufel
Rgulation & Asservissement
L2
nnexe n= 2
&iagrammes de >ode d?un systme de 2
me
ordre
FARES Naoufel
Rgulation & Asservissement
L2
FARES Naoufel
Rgulation & Asservissement
L2
Chapitre + : )epr%sentation des systmes asser!is
1. systme asser!i
1.1. &%'inition
5n systme asser%i est un systme possdant les proprits sui%antes :
- cest un systme a%ec amplification de puissance
- cest un systme a%ec retour
5n systme asser%i possde le schma de structure sui%ant :
Figure+.1. 9chma de structure d'un systme asservi
"ette structure fait inter%enir deux chanes) une chane d,action et une chane d,acquisition)
"e type de systme est appel aussi systme boucl)
5n systme asser%i est un systme boucl c,est dire possdant une rtroaction de la sortie
sur l,entre)
1.2. ,rincipaux %l%ments d?une chaAne d?asser!issement
,artie commande ou r%gulateur
Le r(ulateur se compose d,un comparateur qui dtermine l,cart entre la consi(ne et la
mesure et d,un correcteur qui labore partir du si(nal d,erreur l,ordre de commande.
ctionneur
",est l,or(ane d,action qui apporte l,ner(ie au systme pour produire l,effet souhait. 0l est en
(nral associ un pr-actionneur qui permet d,adapter l,ordre basse puissance# et l,ner(ie.
Capteur
Le capteur prl%e sur le systme la (randeur r(le information physique# et la transforme
en un si(nal comprhensible par le r(ulateur. La prcision et la rapidit sont deux
caractristiques importantes du capteur.
Entr%e Consigne
La consi(ne) est l,entre d,action) c,est la (randeur r(lante du systme.
FARES Naoufel
4(ulateur
&erturbations
=ntre de
rfrence
consi(ne#
"hane directe ou d,action
<ortie
asser%ie
Trandeur
r(lante
"orrecteur
3ctionneur
+
&rocessus
"omparateur
"apteur
Trandeur
mesure
"hane de retour d,acquisition) d,obser%ation#
Rgulation & Asservissement
L2
Sortie r%gul%e
La sortie r(ule reprsente le phnomne physique que doit r(ler le systme) c,est la raison
d,'tre du systme.
,ertur-ation
.n appelle perturbation tout phnomne inter%enant sur le systme qui modifie l,tat de la
sortie. 5n systme asser%i doit pou%oir maintenir la sortie son ni%eau indpendamment des
perturbations.
EcartB Erreur
.n appelle cart ou erreur) la diffrence entre la consi(ne et la sortie. "ette mesure ne peut
'tre ralise que sur des (randeurs comparables.
1.". )%gulation et asser!issement
.n distin(ue deux modes de fonctionnement selon les conditions d,utilisateur :
)%gulation
.n appelle r(ulation un systme asser%i qui doit maintenir constante la sortie conformment
la consi(ne constante# indpendamment des perturbations.
=xemple : 4(ulation de temprature
sser!issement
.n appelle asser%issement un systme asser%i dont la sortie doit sui%re le plus fidlement
possible la consi(ne consi(ne %ariable#
=xemple : asser%issement de position
2. Fonction de trans'ert des systmes compos%s
5n systme complexe est un systme form par l,association de plusieurs lments simples.
Figure+.2. +ommande de la vitesse de rotation d:un moteur
La dtermination de la fonction de transfert d,un systme complexe partir des fonctions de
transfert de ses lments re%ient liminer les %ariables entre-sortie intermdiaires de
manire ne conser%er que la relation entre l,entre et la sortie du systme complet.
=n (nral) lorsqu,on tudie un systme complexe) la premire chose faire et de reprsenter
son schma fonctionnel en prcisant les fonctions de transfert des diffrents lments.
FARES Naoufel
=(& E(& S(&==(&E(&
Rgulation & Asservissement
L2
(. Sch%ma Fonctionnel
".1. Formalisme
.n remplace le modle mathmatique systme dquations# par un schma dont le
formalisme est le sui%ant :
- les branches reprsentent les %ariables O
- les blocs qui reprsentent les transmittances O
- les sommateurs comparateurs# additionnent al(briquement les %ariables O
- les jonctions capteurs# ser%ent prle%er les %aleurs des %ariables.
".1.1. 2e -loc
0l possde une entre et une sortie. 0l est
noter que les flches sont toujours
orientes de l,entre %ers la sortie.
".1.2. 2es sommateurs
0ls sont multiCentr%es mais ne possde q,une sortie.
Les entres sont affectes du si(ne plus pour une
entre positi%e et du si(ne moins pour une entre
n(ati%e.
".1." 2a Donction
La branche de prl%ement .2/ a le m'me si(ne que
la branche principale .1/ et n,affecte pas celui-ci.
".2. ,assage d#un systme d#%$uations un sch%ma 'onctionnel
7out systme dquations peut 'tre reprsent par un schma fonctionnel <.?#.
Exemple 1 : soit le systme de trois quations P inconnues : 9(&0 K(& et s(&
# # # 9#
# . # A#
# #. # P#
& E & S &
& A &
S & + & &
'
.n remarque bien que lquation 9# exprime un comparateur alors que les quations A# et P#
expriment des blocs. Le <.? qui correspond ce systme est le sui%ant :
FARES Naoufel
+
-
E(&
9(&
A +(&
S(&
K(&
% %
%
2
;
E
$
E
2
E
1
S = E
$
2 E
2
2 E
1
+
2
2
Rgulation & Asservissement
L2
Exemple 2 : soit le systme sui%ant A quations A inconnues % et y
: 9#
P A#
% y e
y % e
+
'
+
Le schma fonctionnel qui correspond ce systme est le sui%ant :
".+. ,assage d#un S.F un systme d#%$uations :
7out schma fonctionnel peut 'tre con%erti en un systme dquations selon lal(orithme
sui%ant :
2
ere
tape : >ommer les %ariables dentres et de sorties de chaque sommateur et chaque bloc.
;
me
tape : 8terminer les quations qui relient les %ariables dentres et de sorties pour
chaque comparateur et chaque bloc.
3
me
tape : !ettre les quations de la A
me
tape dans un systme dquations.
Exemple " : soit le schma fonctionnel sui%ant
9
A
9#
. A#
. P#
% e s
y = % s
s = y
'
O est le systme dquations qui reprsente ce <.?
".8. )gles de simpli'ication des S.F
&our tudier la r(ulation dun systme linaire) on cherche toujours sa transmittance qui
relie lentre et la sortie du systme. &our cette raison) il faut a%oir le modle mathmatique
de ce systme) qui est un systme dquations. .r) il nest pas toujours facile de rsoudre un
systme dquation. &ou rsoudre ce problme) on utilise les <.? qui modlise (raphiquement
le modle mathmatique dun systme. .n appliquant les r(les de simplifications des <.?) on
peut a%oir facilement la fonction de transfert de ce systme.
FARES Naoufel
+
2
e
%
=
$
=
2
s
y
+
2
e
%
2$
1
y
2%
3
+
+
+
+
Rgulation & Asservissement
L2
".(.1. Structure en -oucle ou!erte
/ssociation des blocs en cascade &srie) :
/ssociation des blocs en drivation ¶llle) :
".(.2. Structure en -oucle 'erm%e
"as d,un systme retour unitaire + = $# :
9
S =
D
E =
+
"omme =(& est sou%ent de la forme
#
#
#
N &
= & )
A &
) alors :
. #
#
# . #
) N &
D &
A & ) N &
+
".(.". &%placement des points de pr%l!ement .des capteurs/
8:amont en aval d:un bloc
8:aval en amont d:un bloc
".(.(. &%placement des sommateurs
FARES Naoufel
=
$
8=
2
8=
1
E
$
S
$
=
$
=
2
E
$
S
$
=
1
=
$
+=
2
E
$
S
$
=
$
=
2
E
$
S
$
+
+
9 .
=
+ = +
=
<
=
E
S
$
+
+
2
9 .
=
+ =
=
<
=
E
S
$
+
+
+
=
E
$
S
$
C=E
$>=
=
E
$
S
$
C=E
=
E
$
S
$
C=S
=
=
E
$
S
$
C=S
Rgulation & Asservissement
L2
8:amont en aval d:un bloc
8:aval en amont d:un bloc
(.(.*. 1rans'ormation d#un comparateur en sommateur
".(.+. ,ermutation des sommateurs
".(.8. ,ermutation des capteurs
Exercice : 8montrer tous les r(les de simplifications des schmas fonctionnels.
".9. pplications
".*.1. pplication n= 1
.n peut toujours ramener un systme retour non unitaire un systme retour unitaire.
FARES Naoufel
=
E
$
S
$
E
2
+
+
=
E
$
S
$
E
2
+
+
=
=
E
$
S
$
E
2
+
+
$>=
S
$
=
E
$
E
2
+
+
E
$
E
2
S +
2
E
$
E
2
S
2$
+
+
E
$
E
2
E
1
($
(2
S
+
+
+
+
E
$
E
2
E
1
(2
($
S
+
+
+
+
S
L
M
($
(2
S
L
M
(2 ($
S
$
=8+
E
$>+
+
2
S
$
S
$
>E = ($>+ 8 =8+>($++8= = =>($++8=
S
$
=8+
E
$>+
+
2
S
2
S
2
>E = =8+>($++8= 8 ($>+ = =>($++8=
S
$
=
E
+
+
2
S = =>($++8=
S
$
=
$
E
+
+
2
+
2
=
2
=
1
S
$
=
$
E
+
+
2
=
2
>($+=
2
=
1
S
$
E
+
+
2
=
4
S
$
=
$
E
+
$
+
2
+
2
=
2
=
4
+
2
=
1
+
2
S
$
=
$
E
+
$
+
2
+
2
=
2
+
2
=
1
+
2
8=
4
=
4
=
4
Rgulation & Asservissement
L2
".*.2. pplication n= 2 : -oucles concentri$ues
<thode " .n isole boucle par boucle en rduisant la plus interne en premier.
La rduction de la boucle interne donne
A
A
9
=
= +
d,oC le nou%eau systme :
La chane directe a pour %aleur :
9 A P
R
A
9
= = =
=
=
+
et en rduisant la dernire boucle :
".*.". pplication n= " : -oucles im-ri$u%es
<thode " .n s,attache aux boucles les plus internes en dpla/ant les transmit tances (antes.
La solution consiste chasser => %ers l,a%al et rduire la boucle comportant =3.
FARES Naoufel
S
$
=
$
E
+
$
+
2
+
2
=
2
+
2
=
4
=
4
=
1
$++
2
=
1
=
4
1'
S
$
=
$
E
+
2
=
4
=
4
=
2
=
1
$++
2
=
1
=
4
+ +
$
=
2
=
1
+'
I
=
$
+
=
2
E +
2
+
+
=
1
S
$
S
$
=
$
I
+
=
2
2$
=
1
+
+
Rgulation & Asservissement
L2
La boucle comporte =3 et ,;.=> se rduit :
P
P R A
9
=
= = + +
4duction de la boucle interne :
A P A
A 9 9 A P A P R
9 9
= = "=
"= + + = = + = =
+ + +
) d,oC le dernier schma :
=t la dernire rduction donne :
9 A P R
9 A P A P R 9 A P R
9
= = = = S
E + = = + = = = = = =
+ + +
".*.(. pplication n= ( : systme deux entr%es et une sortie
"e systme possde deux fonctions de transfert :
1 I
S
E
_
,
et
1 E
S
I
_
,
9_# pour l,entre I=!)
9 A
9 9 A
9
= = S
E + = =
+
A_# pour l,entre E=!) nous retrou%ons le schma sui%ant :
FARES Naoufel
7!
(log
+
("
+$(5(">o*t ou 2!(">(e*
(log
!0$
$
22!
24!
!0!$
Rgulation & Asservissement
L2
La boucle de retour est alors +8=
$
) d,oC :
A P A
P
9 9 A 9 9 A
9 9
= = = S
=
I + = = + = =
+ +
=n appliquant le thorme de superposition) nous obtenons :
9 A A P
9 9 A
9
= = E = = I
S
+ = =
+
+
(. d%termination prati$ue des lieux de trans'ert
(.1. Fonctions %l%mentaires
.n %a prsenter les lieux de Vode des fonctions lmentaires sui%antes :
( )
( )
#
$
= <
$
= &
&
2
'
( )
( )
#
= <
= & &
2
'
+
FARES Naoufel
+
("
2!
2$(25(">o*t ou 22!(">(e*
$
(log
!0$
27!
(log
+
("
B;!0G
+2
!
(log
B:!0G
+$6!
(log
+7!
!
B;!0G
B:!0G
!
Rgulation & Asservissement
L2
( )
( )
#
2
2
$
= <
$
= &
&
'
# = & $ & +
O courbes de (ain et de phase sont opposes celles du 9
er
ordre
$
$ & +
.
#
$
= &
$ &
O m'me courbe de (ain que
$
$ & +
et courbe de phase oppose.
#
2
! !
2B &
= & $ &
_
+ +
,
O courbes opposes celles du A
me
ordre
2
! !
$
2 B &
$ &
_
+ +
,
.
FARES Naoufel
2!
2!
+
("
22(2$2(">o*t ou 24!(">(e*
$
(log
!0!$
4!
2$6!
(log
+
("
+1
+$
$>
(log
+7!
(log
$>
+43
!
+
("
21
2$
$> (log
+7!
(log
$>
+43
!
Rgulation & Asservissement
L2
(.2. Systmes $uelcon$ues
&our un systme quelconque) on le dcompose sous forme de facteurs lmentaires puis on
fait l,addition (raphique :
i
i
et
i
i
+ +
.
0l est recommander de commencer par ajouter les dia(rammes asymptotiques et de placer
ensuite les courbes par rapport aux asymptotes.
(.2.1. Exemple1 :
#
. #
$
= &
& $ ! 3 &
+
O
$
$
et
2
$ 2
(.2.2. Exemple2 :
( )
( )
# .
. . .
2
$! $
= &
$ ! $ & $ ! 4 & ! 23 &
+ + +
FARES Naoufel
+
("
2$
$> 2 (log
$ !0$
2$
22
$
&
.
$
$ ! 3 & +
. #
$
& $ ! 3 & +
27!
(log $> 2
2$13
2$6!
.
$
$ ! 3 & +
. #
$
& $ ! 3 & +
.
!
B ! 4
2 or(re
2
'
.
!
! $
$ or(re
$ $!
'
+
("
21
10
(log
2
2!
22
$0G
220G
27!
(log 2
2223
2$6!
22G!
10
Rgulation & Asservissement
L2
(.2.". Exemple" :
# .
2
2
! !
$ $
= &
2 B & $ &
$ &
+
+ +
a%ec :
!
= $) B = $ et $> = 2 puis $> = $
FARES Naoufel
$
2
2223
2$6!
22G!
27!
(log 1 2
+
("
21
2
(log
$
22
25
$
$
+
("
21
(log
0
$> 1
27
2$13
22G!
(log
0
1/ 1
Rgulation & Asservissement
L2
Chapitre 8 : ,er'ormance des systmes asser!is
Le but de ce chapitre est de mettre en %idence les caractristiques fondamentales d,un
systme asser%i) sa%oir : la sta-ilit%) la rapidit% et la pr%cision. 5n systme est performant
s,il est stable) rapide et prcis.
1. Sta-ilit%
1.1. Eotion de sta-ilit%
5n systme linaire est stable s,il tend re%enir son tat permanent aprs l,application
d,une perturbation. 8ans le cas contraire) il est instable.
5n systme est stable si une entre finie correspond une sortie finie.
5n systme est stable si la rponse libre du systme tend %ers Hro l,infini.
4ponse d,un systme stable 4ponse d,un systme instable
1.2. Critre alg%-ri$ue de sta-ilit%
La condition n%cessaire est su''isante pour q,un systme linaire soit stable et que tous les
ples de sa fonction de transfert soient partie relle n(ati%e :
# # # #
# ) a%ec : #
# # # # #
$
$
N & + & N & N &
= & + &
$ + & N & A & A & A &
+ +
FARES Naoufel
Rgulation & Asservissement
L2
Les ples de =(& sont les racines de son quation caractristique : A
$
= ! ou N(& + A(& =!
ou encore $ + +(& = !8
Le systme est stable en boucle ferme si l,quation caractristique n,a pas de racine partie
relle positi%e.
0l est la limite de stabilit s,il a un ou plusieurs ples partie relle nulle de la forme t<
l
#
et les restes sont tous partie relle n(ati%e.
La condition (nrale de stabilit cite prcdemment n,est applicable en pratique que si on
connat tous les ples c,est dire si on a rsolu l,quation caractristiques. "ependant) partir
d,un de(r 4) la rsolution de cette quation de%ient difficile. La r(le de 4outh permet de
ju(er de la stabilit du systme directement partir des coefficients de son quation
caractristique.
La position des ples de la fonction de transfert en boucle ferme nous rensei(ne donc sur la
stabilit du systme.
1.". )gle de )outh
<oit l,quation caractristique sui%ante : ...
n n $
n n $ $ !
a & a & a & a !
+ + + +
.n arran(e les coefficients comme suit :
n
&
n
a
n 2
a
n 4
a
9 n
p
n $
a
n 1
a
n 3
a
n 2
&
n $
n $ n 2 n n 1
n $
a a a a
a
1 4 44 2 4 4 43
n 1
n $ n 4 n n 3
n $
a a a a
a
1 4 44 2 4 4 43
: n
FARES Naoufel
4acine relle
n(ati%e
4acines
ima(inaires pures
4acine relle
n(ati%e
4acines complexes
conju(ues partie
relle n(ati%e
4acines complexes
conju(ues partie
relle positi%e
<table 0nstable
Rgulation & Asservissement
L2
n 1
&
n $ n 1 n $ n 1
n $
a a
n $ n 3 n $ n 3
n $
a a
!
&
<i tous les termes de la premire colonne sont de m'me si(ne) le systme est stable) sil y a
m chan(ement de si(ne dans cette colonne) on peut conclure que lquation caractristique a
m racine partie relle positi%e) donc le systme est instable.
Exemple 1 : =quation caractristique
4 1 2
& & 1 & 4 & 4 ! + + + +
.n a 2 chan(ements de si(ne
2 Hros partie relle positi%e
<ystme est
instable
<i on rencontre une li(ne qui ne comporte que des Hros) la li(ne prcdente donne une
quation auxiliaire de lquation caractristique.
Exemple 2 :
=quation auxiliaire :
#
2
au%
A & 2 & 4 ! +
<i A(& = ! est lquation caractristique alors A(& = A
au%
8 A
2
(&
La rsolution de A
au%
(& = ! donne des ples ima(inaires purs de la forme & = t <
l
. 8onc si
le reste des ples sont partie relle n(ati%e
systme la limite de stabilit.
&our continuer ltude) la li(ne comporte que des Hros sera remplace par les coefficients de
la dri%e de lquation auxiliaire.
Exemple " : #
5 3 4 1 2
A & & 3 & $! & 2! & 2G & $3 & $6 ! + + + + + +
FARES Naoufel
4
&
$ 1 4
1
&
$ 4 !
2
&
2$ 4 !
&
6 !
!
&
4
2
&
A R
&
1 1
!
&
Rgulation & Asservissement
L2
)emar$ue : si on di%ise une li(ne par un
m'me coefficient positif) le raisonnement
reste le m'me.
La li(ne en
1
& ne comporte que des Hros
quation auxiliaire : #
4 2
au%
A & & 4 & 1 ! + +
#
1
au%
(
A & 4 & 6 &
(&
+
.n remplace les Hros par les coefficients > et ?
.n n,a pas de ple partie relle positif et puisquon a des ples ima(inaires pures les
racines de lquation A
au%
(& = !. Le systme est alors la limite de stabilit.
#
4 2
au%
A & & 4 & 1 ! + +
2
l $
& $ & < < t t O
2
l 2
& 1 & 1 < < t t
Les pulsations des auto-oscillations sont : F O F
l $ l 2
$ ra( s 1 ra( s
Exemple ( : =tudions la stabilit de ce systme asser%i en fonction de # # ;!#
Lquation caractristique :
#
#
2
#
A & $ !
& & & $
+
+ +
) <oit
1 2
& & & # ! + + +
si # $ O # : $
systme stable
# ; $ systme instable
# = $ : prsence dune quation auxiliaire
FARES Naoufel
5
&
$ $! 2G $6
3
&
3 ($ 2! (4 $3 (1 ! F:#
4
&
5 ($ 24 (4 $6 (1 ! F@#
1
&
! !
R
p
$ 4 6
P
p
4 ($ 6 (2 ! FR#
A
p
2 1 !
&
!03 !
1
p
1
1
&
$ $ !
2
&
$ #
&
$2# !
!
&
#
#
#
#
2
$
+ &
& & & $
+ +
E(&
+
I
S(&
Rgulation & Asservissement
L2
#
2 2
au%
A & & # & $ ! & < + + t Le systme est la limite de stabilit la pulsation
des oscillations est
l
= $ ra(>s.
<i lun des termes de la 9
re
colonne est nul) on remplace ce Hro par un nombre positif
petit et on poursuit les calcules. &our tudier les %ariations de si(ne on fait tendre !
+
.
Exemple * : #
4 1 2
A & & & & & 2 ! + + + +
+
1
2
.n a deux chan(ements de si(ne <ystme instable
)emar$ue : pour q,un systme puisse 'tre stable) son quation caractristique doit %rifier les
A conditions sui%antes :
- tous les coefficients a
i
i = !0 $0 N0 n# sont non nuls.
- tous les coefficients a
i
i n# ont tous le m'me si(ne que a
n
i = !0 $0 N0 n2$#
1.(. Critre graphi$ue de sta-ilit%
.n applique les conditions de stabilit aux lieux de transfert. 3 partir du lieu de transfert en
-oucle ou!erte) on dduit la stabilit du systme en -oucle 'erm%e.
Les conditions =&@).,&@) ' 02 mettent en %idence un point particulier) extrmit du
%ecteur de module 1 et d,ar(ument . "e point est appel point criti$ue.
2.>.2. 8ans le plan de 5y-uist
+ritre du revers : Le systme sera stable si) en parcourant le lieu de transfert dans le sens des
croissants) on laisse le point critique -9# sur la (auche.
FARES Naoufel
4
&
9 9 A
1
&
9 9 1
2
& 1 # A 1
&
2
1
!
&
A
Rgulation & Asservissement
L2
1 : instable 2 : @uste instable " : stable
2.>.;. 8ans le plan de 1ode
Le systme sera stable si) pour la pulsation
os*
qui correspond ar(K=<#L D $6!?#) la
courbe d,amplitude passe en dessous du ni%eau ! (".
1 : stable 2 : @uste instable " : instable
2.>.3. 8ans le plan de 1lac4
Le systme sera stable si) en parcourant le lieu de transfert dans le sens des croissants) on
laisse le point critique 2$6!?) ! ("# sur la droite.
FARES Naoufel
Rgulation & Asservissement
L2
1 : stable 2 : @uste instable " : instable
1.*. &egr% de sta-ilit%
<i un systme est la limite de la stabilit) l,allure de la rponse est trs oscillante et la
moindre dri%e de l,un des paramtres due en particulier la temprature#) peut entraner
l,instabilit. "es raisons expliquent qu,en pratique) on ne se contente pas de raliser un
systme thoriquement stable. .n assure la stabilit d,un systme en prenant des mar(es de
scurit. "es mar(es se traduisent par une distance respecter entre le lieu de la fonction de
transfert en boucle ou%erte et le point critique d,affixe -9. .n %a donc pr%oir des mar(es de
(ain et de phase afin d,assurer une stabilit pratique.
2.).2. <ar!e de !ain
!( D A1 lo( K9 F G j
1
#L 8
1
tant la pulsation pour laquelle la phase est de -9S1_.
L,affixe du point critique a pour module $ et pour ar(ument 2$6!?. Lorsque l,on se fixe une
mar(e de (ain) on se donne une distance respecter entre le point de la fonction de transfert
en boucle ou%erte pour lequel la phase %aut 2$6!? et le point critique. 5ne %aleur de la mar(e
de (ain couramment utilise est $!(".
8ans le plan de Ey$uist) la mar(e de (ain se mesure sur l,axe des rels entre le point critique
et le point d,intersection du lieu de la ?7V. a%ec l,axe des rels. ",est en effet en ce point que
la phase de la ?7V. %aut 2$6!?.
8ans le plan do >lacF) la mar(e de (ain se lit directement en dV.
La reprsentation de >ode permet (alement une lecture directe de la mar(e de (ain en dV.
Ey$uist >ode
FARES Naoufel
Rgulation & Asservissement
L2
>lacF
Marge de gain a!ec les repr%sentations de Ey$uistB >ode et >lacF
2.).;. <ar!e de phase
! D 9S1_ + 3r( KG j
9
#L .
9
tant la pulsation pour laquelle le module de G j
9
# D 9 1 dV#.
La mar(e de phase est la diffrence de phase entre la phase du point de la ?7V. de module 9
et la phase du point critique -9S1_. Les diffrentes reprsentations du lieu de la ?7V.
permettent de mettre en %idence cette mar(e.
8ans le plan de Ey$uist) le point de module 9 de la ?7V. se trou%e sur un cercle de rayon 9)
centre sur l,ori(ine. 8ans le plan de >lacF) ce point se trou%e l,intersection a%ec 0,axe des
ar(uments. &our la reprsentation de >ode) le point de module 9 s,obtient sur le trac du
module en fonction de la pulsation. .n dduit par correspondance l,ar(ument associ. .n
utilise couramment une mar(e de phase de R:_ qui (arantit un fonctionnement correct de la
plupart des systmes.
Ey$uist >ode
>lacF
Marge de phase a!ec les repr%sentations de Ey$uistB >ode et >lacF
FARES Naoufel
Rgulation & Asservissement
L2
$83818 E%em&le : soit la F1>G :
#
) # ) #
#
+ &
& $ ! $ & $ ! !$ &
+ +
8terminer # pour que le systme en boucle ferme soit stable.
.n obtient # = #
ma%
pour
# + < $
et = 2$6!?
<i # : #
ma%
) alors le systme en boucle ferme V.?# est stable
.n a :
#
) # ) #
)
+ <
< $ ! $ < $ ! !$ <
+ + ) )
2
) $
< $ ! !!$ ! $$ <
+
= 2$6!? = 7! 2
)
ar(
)
2
! $$
$ ! !!$
)
ar(
)
2
! $$
7!
$ ! !!$
=t par suite : )
2 2 2
$ ! !!$ ! $!!!
8,autre part :
#
#
#
) # ) #
2 2
)
+ < $
$ ! $ $ ! !$
_
+ +
,
"e qui nous donne : #
ma%
=
( )
) # ) #
2 2
$ ! $ $ ! !$ $!!
+ +
"onclusion : pour que le systme en boucle ferme soit stable) il faut que # : $!!
2. pr%cision d?un systme asser!i lin%aire
2.1. &%'inition
La prcision est caractrise par l,erreur permanente qui est la diffrence entre la %aleur
dsire e(t et la %aleur obtenue s(t. .n distin(ue deux types d,erreurs :
- L,erreur stati$ue : c,est l,erreur en r(ime permanent entre la sortie et la loi d,entre. &our
dterminer cette erreur) on soumet le systme des entres canoniques :
achelon) on parle alors d,erreur indicielle)
4ampe) erreur de trana(e ou erreur de poursuite
3cclration) erreur en acclration.
- L,erreur dynami$ue : c,est l,cart instantan entre la sortie et l,entre lors de la phase
transitoire sui%ant l,application de l,entre ou aprs une perturbation hors pro(ramme#)
FARES Naoufel
s(t
e(t
e(t
s(t
: "lasse du systme
) : (ain du systme
Rgulation & Asservissement
L2
2.2. Calcul d?erreur
<oit un systme retour unitaire :
=xprimons la %aleur de (& :
# # # # # # #K #L # & E & S & E & & D & & $ D & E & +
#
#
#
E &
&
$ D &
+
&our reconnatre la %aleur de (t en r(ime tabli) appliquons le thorme de la %aleur finale :
#
lim # lim # lim
#
t & ! & !
E &
t & & &
$ D &
+
2.". In'luence de la structure du systme asser!i sur la pr%cision
Fig 1 : "as d,un systme retour non unitaire Fig 2 : "as d,un systme retour unitaire
FD"H = F(& R(&# FD"H = F(&
La fonction de transfert en boucle ou%erte du systme tudi peut 'tre mise sous la forme :
# ....#
# , , ....#
2
2
)N & ) $ a& .&
FD"H
& A & & $ a & . &
+ + +
+ + +
O et
.n a :
. #
#
# # # # # #
. #
#
) N &
FD"H & A &
& E & S & E & E & E & $
) N &
$ FD"H
$
& A &
1
1
1
+
1
+
1
]
#
# #
# #
& A &
& E &
& A & )N &
+
.n %oit que l,erreur dpend de la nature de l,entre mais aussi de la fonction de transfert en
boucle ou%erte.
>ous allons dans la suite tudier en fonction des entres types chelon) rampe) acclration
et de la nature du systme.
;.3.2. Rponse un chelon " rreur indicielle
L,entre est de la forme :
# # #
!
!
E
e t E u t E &
&
FARES Naoufel
A(! =$
N(! =$
+
-
E(&
9(&
F(&
R(&
S(&
+
-
E(&
9(&
F(&
S(&
+
-
E(&
9(&
D(&
S(&
Rgulation & Asservissement
L2
#
lim # lim lim
# #
! !
& ! & ! & !
E E & & A &
& & &
& A & ) N & & & )
1 1
1 1
+ +
] ]
.n %oit que la rponse est fonction de la classe du systme :
<ystme de classe :
!
lim
! !
& !
E & E
& ) $ )
1
1
+ +
]
<ystme de classe :
! >
lim
!
& !
E &
!
& )
1
1
+
]
;.3.;. Rponse une rampe " rreur de traAna!e
L,entre est de la forme :
# . . # #
2
A
e t A t u t E &
&
#
lim # limp lim
# #
$
2
& ! & ! & !
& A & A A&
& &
& A & ) N & & & )
1 1
1 1
+ +
] ]
.n %oit que la rponse est fonction de la classe du systme :
<ystme de classe :
!
lim lim
$ $
& ! & !
A& A&
& ) $ )
1 1
+
1 1
+ +
] ]
<ystme de classe :
$
lim lim
$
& ! & !
A& A A
& ) & ) )
1 1
1 1
+ +
] ]
<ystme de classe :
$ >
lim
& !
A&
!
& )
1
1
+
]
;.3.3. Rponse une entre paraboli-ue " rreur en acclration
L,entre est un chelon d,acclration :
# . . # #
2
1
A A
e t t u t E &
2 &
&ar analo(ie a%ec l,tude prcdente) en fonction de la classe du systme) on peut dduire la
prcision du systme :
<ystme de classe :
A
< +
<ystme de classe :
A
A
)
<ystme de classe :
A !
>
)emar$ue : La prcision au(mente a%ec la classe du systme
FARES Naoufel
Rgulation & Asservissement
L2
;.3.>. Tableau rcapitulatif
Le tableau sui%ant rsume la %aleur de l,erreur en fonction de l,entre et de la classe.
Classe
Entr%e
< 1 2 "
Echelon
!
E
$ ) +
! ! !
)ampe +
A
)
! !
cc%l%ration + +
A
)
!
Exercice d?application : <oit le systme sui%ant qui est soumis une entre chelon puis
une rampe) calculer par deux mthodes l,erreur en r(ime tabli.
# # #
#
E & E & $ &
&
)
$ & )
$
$ &
+
+ +
+
+
a/ pour e(t = $8 u(t O
$
!
$ )
+
.u bien
#
# lim # lim
& ! & !
$ $ $ & $
E & & & &
& & $ & ) $ )
+
+ + +
-/ pour e(t =t u(t O
!
.u bien
#
# lim # lim
2 2
& ! & !
$ $ $ &
E & & & &
& & $ & )
+
+ +
2.(. Calcul de pour di''%rents systmes
;.>.2. 9ystme retour non unitaire
# # #. #
# #. #. #
2
$ 2
& E & S & + &
E & & + & + &
#
#
# #
$ 2
E &
&
$ + & + &
+
;.>.;. 9ystme deu# entres
[ ]
# # # # # # # #
2 $
& E & S & E & + & + & & I &
#
# # #
# # # #
2
$ 2 $ 2
+ & $
& E & I &
$ + & + & $ + & + &
+
+ +
FARES Naoufel
+
-
E(&
9(&
+
$
(&
+
2
(&
S(&
+
-
E(& 9(&
)
$ & +
S(&
+
2
E(&
(&
+
$
(& +
2
(&
S(&
I(&
+
2
Rgulation & Asservissement
L2
SE)IE E=1
Exercice 1 :
=tudier la stabilit des systmes sui%ants :
a# #
4 1 2
A & & 1 & 4 & 1 & 1 + + +
b# #
1 2
A & & a& .& * + + +
c# #
2
A & & a& . + +
Exercice 2 :
&our quelle %aleur de T le systme est stable) dans les diffrents cas sui%antes :
a#
b#
c#
FARES Naoufel
E(&
+
# #
$
6 & $ $ 2 I + +
S(&
+
2
$
& $ +
E(&
)
$
6 & $ +
S(&
+
2
)
$
! 3 & $ +
E(&
+
#
2
$!
& 2 I $ +
S(&
+
2
$
& $ +
Rgulation & Asservissement
L2
Exercice 3 :
<oit le systme sui%ant :
9# 8terminer la forme la plus simple du r(ulateur 4p# pour assurer une erreur statique
de position nulle et un systme stable
A# "alculer les paramtres du r(ulateur si on dsire a%oir un 8^ J A1^
P# 8terminer la forme la plus simple de 4p# pour assurer une erreur statique de %itesse
nulle. "onclure sur la stabilit
Exercice 4 :
<oit le systme sui%ant :
9# "hoisir la forme la plus simple de 4p# de fa/on a%oir une erreur statique de %itesse
JA1^
A# "alculer alors le temps de pic et 8
P# "hoisir 4p# de fa/on amliorer t
pic
7,
pic
D t
pic
F91# tous en maintient une erreur statique de
%itesse JA1^
R# "hoisir de nou%eau 4p# de fa/on %oir le 8 de la question P a%ec la condition sur l,erreur
statique de la question 9
SE)IE E=2
FARES Naoufel
E(&
R(&
# #
$
$ & $ 2 I + +
S(&
+
2
E(&
R(&
$
$ & +
S(&
+
2
Rgulation & Asservissement
L2
Exercice 1 :
<oit les systmes linaires sui%ants dcrits par les quations :
a#
, # # # y t y t e t +
b#
\ # , # # et# +h e,t# a y t . u t * y t ( + +
acrire les expressions des transmittances harmoniques et oprationnelles yt# est la sortie)
et# est lentre#
Exercice 2 :
9. 7racer le dia(ramme de Vode asymptotiquement des fonctions de transfert sui%antes :
a# G
9
p# D 911
b# G
A
p# D 9+ p
c#
P
9
# = &
&
d#
R
9
#
9 1)9
= &
&
+
e#
:
9
#
9 1) 19
= &
&
+
A. 7racer le dia(ramme asymptotique de Vode de la fonction sui%ante :
9119 #
#
9 1)9 #9 1) 119 #
&
= &
& & &
+
+ +
P. 7racer le dia(ramme de Vode de chaque fonction de transfert du 9.courbe relle#
R. 7racer le dia(ramme de VlacN de chaque fonction de transfert du 9
:. 7racer le dia(ramme de >yquist de chaque fonction de transfert du 9
Exercice 3 :
9. =tudier le comportement lori(ine du plan du nyquist # des systmes :
a#
9
#
9 #
)
= &
&
+
b#
A
#
9 #9 A #
)
= &
& &
+ +
c#
P
#
9 #9 A #9 P #
)
= &
& & &
+ + +
d#
R
9 R #
#
9 #9 A #9 P #
) &
= &
& & &
+
+ + +
e#
:
9 R #9 : #
#
9 #9 A #9 P #
) & &
= &
& & &
+ +
+ + +
A. 7racer le dia(ramme de Vode asymptotiquement des fonctions de transfert prcdentes.
!rie <=&
FARES Naoufel
Rgulation & Asservissement
L2
<oit le schma fonctionnel sui%ant) rduire ce schma en un seul bloc reliant lentre 5s# et
la sortie bs#.
.n appliquant les r(les de simplifications des <?) on trou%e le rsultat sui%ant :
Exemple : Mod%lisation d#un moteur courant continu excitation s%par%e
<oit le schma technolo(ique dun moteur 8" excitation spare constante. Le si(nal
dentre est la tension u
a
(t aux bornes de linduit alors que le si(nal de sortie est la position
an(ulaire O(t de larbre moteur.
FARES Naoufel
8placement du
capteur damont en a%al
du bloc TPs#
3pplication de la formule du
VlaN et blocs en cascade qui
donne :
3pplication de la
formule du VlacN et
blocs en cascade qui
donne le rsultat
final
Rgulation & Asservissement
L2
<ise en -uation du systme
!odle dans le domaine temporel !odle dans le domaine de Laplace
#
# # #
a
a a a a m
(i t
u t R i t L e t
(t
+ + # # # #
a a a a a m
E & R @ & L &@ & E & + +
# #
m E
e t ) t # #
m E
E & ) &
# #
em D a
D t ) i t # #
em D a
D & ) @ &
#
# #
t em f
( t
- D t R t
(t
# # #
t em f
- & & D & R &
#
#
( t
t
(t
# # & & &
FARES Naoufel
Rgulation & Asservissement
L2
)EFE)EECES >I>2IGH),IIJKES
[9] 9ystmes asservis linaires) collection 3. "aplieH =ducali%re#
W.". "hau%eau et &. "hau%eau
[A] L'automati-ue en classes prparatoires) collection =llipses
Vernard 8escotes-Tenon et Wean Le Vail
[P] /sservissements linaire continusB 85>.8 5>0$=4<07=
?. 8e "arfort) ". ?oulard et W. "al%et
[R] R!ulation et asservissementB =ditions =b4.LL=<
7. Gans et &. Tuyenot
[:] R!ulation automati-ueB &resses &olytechniques 4omandes
Louis !arNet
FARES Naoufel
Вам также может понравиться
- TD MatlabДокумент31 страницаTD MatlabSaad Chakkor100% (2)
- Electtro Alger PDFДокумент93 страницыElecttro Alger PDFAyoub Fedjikh0% (1)
- TP1 TDSA GET1 Mars 2020Документ2 страницыTP1 TDSA GET1 Mars 2020elmehdi bendadaОценок пока нет
- Mémoire de Fin D'étude: République Algérienne Démocratique Et PopulaireДокумент105 страницMémoire de Fin D'étude: République Algérienne Démocratique Et PopulaireChaimaa GuendouzОценок пока нет
- Rapport PFE4Документ50 страницRapport PFE4azdinОценок пока нет
- AlgebrebooleДокумент79 страницAlgebrebooleEl Amrani LailaОценок пока нет
- Cours Traitement de SignalДокумент56 страницCours Traitement de SignalBASMA MIRHISSОценок пока нет
- TD 2Документ2 страницыTD 2youssefОценок пока нет
- ENEOДокумент1 страницаENEOPaola DjeugaОценок пока нет
- Matière Electronique Systèmes PDFДокумент71 страницаMatière Electronique Systèmes PDFYassine BelhmerОценок пока нет
- Devoir1 MaisonДокумент1 страницаDevoir1 MaisonachmmhomieОценок пока нет
- RessourcesДокумент6 страницRessourcesbouabidi samiaОценок пока нет
- Additionneur 1 BitДокумент9 страницAdditionneur 1 BitkhawlaaaaОценок пока нет
- Exercices Calcul Du Radiateur D Un TransistorДокумент4 страницыExercices Calcul Du Radiateur D Un Transistormohamed oukiliОценок пока нет
- TD1 FiltrageДокумент5 страницTD1 FiltrageAkram Djerrar100% (1)
- Série de TD N: 2: Exercice 1Документ3 страницыSérie de TD N: 2: Exercice 1Hafa ApbОценок пока нет
- TD MatlabДокумент6 страницTD Matlabdfe100% (2)
- Approximation Du Modèle Géométrique Inverse D'un Robot Manipulateur Par Les Réseaux de Neurones ArtificielsДокумент70 страницApproximation Du Modèle Géométrique Inverse D'un Robot Manipulateur Par Les Réseaux de Neurones ArtificielsMohamed LahnineОценок пока нет
- Algebre de Bool PDFДокумент21 страницаAlgebre de Bool PDFgargield63Оценок пока нет
- Cotdelct 04Документ5 страницCotdelct 04sidi100% (1)
- TD - Generalites Sur Les SignauxДокумент1 страницаTD - Generalites Sur Les SignauxEttien Hans Joel joseph Aka0% (1)
- El CommutateurДокумент5 страницEl CommutateurkouakouОценок пока нет
- TD4 Electronique Numérique DIC1Документ3 страницыTD4 Electronique Numérique DIC1Jacques GregoireОценок пока нет
- TP 1 - Fonctions de L'électroniqueДокумент4 страницыTP 1 - Fonctions de L'électroniqueMohamed DjezzarОценок пока нет
- TP N°01 PDFДокумент4 страницыTP N°01 PDFNouzha Boukouba100% (1)
- Série 3+corrigéДокумент4 страницыSérie 3+corrigéAli AyadОценок пока нет
- Les Systèmes Asservis Linéaires Continus (Chapitre 6)Документ19 страницLes Systèmes Asservis Linéaires Continus (Chapitre 6)Mohamed AliОценок пока нет
- Tsti Ex04Документ2 страницыTsti Ex04pОценок пока нет
- Chapitre 1 - Filtrage Multi CadenceДокумент34 страницыChapitre 1 - Filtrage Multi Cadencepink flowerОценок пока нет
- Add SOUSДокумент9 страницAdd SOUSNabil KhОценок пока нет
- TD Signal 3 SolutionДокумент7 страницTD Signal 3 SolutionHAHA100% (2)
- Cours D'électrotechnique Abomey EnsgepДокумент146 страницCours D'électrotechnique Abomey Ensgepforeol avocetienОценок пока нет
- SeriesFourier PDFДокумент58 страницSeriesFourier PDFDJIL BENОценок пока нет
- hcs12 PDFДокумент65 страницhcs12 PDFachraf_djyОценок пока нет
- Policopi YadjourДокумент75 страницPolicopi YadjourAymen HsОценок пока нет
- Cours Action NeuДокумент73 страницыCours Action NeuHajji Mohamed Karim0% (1)
- Cours Sur Les AlgorigrammesДокумент8 страницCours Sur Les Algorigrammeskamal100% (1)
- Amplificateur de MesureДокумент9 страницAmplificateur de MesureMohamed Amine TahiriОценок пока нет
- Chapitre 1 - Etude Des Systèmes ÉlectriquesДокумент46 страницChapitre 1 - Etude Des Systèmes Électriquesأشرف عبودОценок пока нет
- Langage CДокумент209 страницLangage Cjoca95cergyОценок пока нет
- Proteus - Trace de TyponДокумент52 страницыProteus - Trace de TyponRomuald AHODEHINTOОценок пока нет
- TD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxДокумент5 страницTD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxÆn RåçhОценок пока нет
- 3ème Année Licence ElectroniqueДокумент2 страницы3ème Année Licence ElectroniquekhalfallaouiОценок пока нет
- Examen Final SEER-1+ GECSI-1 2018 2019 Pour TD de RévisionДокумент1 страницаExamen Final SEER-1+ GECSI-1 2018 2019 Pour TD de RévisionMounaim MatiniОценок пока нет
- Memoire-2021 V2Документ80 страницMemoire-2021 V2Ilyes KhelifiОценок пока нет
- TP Sur Le Multivibrateur AstableДокумент10 страницTP Sur Le Multivibrateur AstableShehabОценок пока нет
- Signal PDFДокумент208 страницSignal PDFgalou123Оценок пока нет
- TP Am+fmДокумент10 страницTP Am+fmpc hpОценок пока нет
- tp.2 01Документ3 страницыtp.2 01Selma HaffadОценок пока нет
- Cours Electronique Numerique-3Документ141 страницаCours Electronique Numerique-3ibouОценок пока нет
- TD4 - Analyse de FourierДокумент3 страницыTD4 - Analyse de FourierBor Han100% (1)
- UntitledДокумент5 страницUntitledParc ElyesОценок пока нет
- Tp1 Presentation Materiel Utilise TP Traitement Signal PDFДокумент13 страницTp1 Presentation Materiel Utilise TP Traitement Signal PDFFatma BelabedОценок пока нет
- 00d Cours Les Actionneurs PDFДокумент1 страница00d Cours Les Actionneurs PDFFabriceОценок пока нет
- Logique Batat TP1Документ4 страницыLogique Batat TP1Beyaz ÇiçekОценок пока нет
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabОт EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabОценок пока нет
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesОт EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesОценок пока нет
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueОт EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueОценок пока нет
- PliageДокумент9 страницPliageNaoufel Fares0% (1)
- APPLICATION Bielle ManivelleДокумент2 страницыAPPLICATION Bielle ManivelleNaoufel FaresОценок пока нет
- TP1 Sem1 Licence en Génie Mécanique - Tronc Commun Niv1 Atelier Procédés Et Méthodes de Production 1Документ3 страницыTP1 Sem1 Licence en Génie Mécanique - Tronc Commun Niv1 Atelier Procédés Et Méthodes de Production 1Naoufel FaresОценок пока нет
- Bride À Machoire (Corrigé) PDFДокумент9 страницBride À Machoire (Corrigé) PDFNaoufel Fares50% (2)
- C7-Chap2-arbre Poulie Et CompresseurДокумент2 страницыC7-Chap2-arbre Poulie Et CompresseurNaoufel FaresОценок пока нет
- Matériel Nécessaire Pour Les Travaux Pratiques de Mécanique GénéralДокумент2 страницыMatériel Nécessaire Pour Les Travaux Pratiques de Mécanique GénéralNaoufel FaresОценок пока нет
- ExamДокумент3 страницыExamNaoufel FaresОценок пока нет
- C7-Chap2-arbre Poulie Et CompresseurДокумент2 страницыC7-Chap2-arbre Poulie Et CompresseurNaoufel FaresОценок пока нет
- TD CompresseurДокумент7 страницTD CompresseurNaoufel FaresОценок пока нет
- Chapitre 3 Programmation Machines Outils Commande NumeriqueДокумент33 страницыChapitre 3 Programmation Machines Outils Commande Numeriqueسيف الدين يعقوبيОценок пока нет
- Devoir 2èmeДокумент1 страницаDevoir 2èmeNaoufel FaresОценок пока нет
- Mini-Etau de Serrage (Corrigé)Документ9 страницMini-Etau de Serrage (Corrigé)Naoufel Fares100% (11)
- La Théorie Des MécanismesДокумент13 страницLa Théorie Des MécanismesMohamed Ali ElouaerОценок пока нет
- Bride À Machoire (Corrigé) PDFДокумент9 страницBride À Machoire (Corrigé) PDFNaoufel Fares50% (2)
- 03 - Abreg - Systeme Banc D'essaiДокумент1 страница03 - Abreg - Systeme Banc D'essaiNaoufel FaresОценок пока нет
- CR 420 PDFДокумент2 страницыCR 420 PDFSdiri OùMaimàОценок пока нет
- Mini-Etau de Serrage (Corrigé)Документ9 страницMini-Etau de Serrage (Corrigé)Naoufel Fares100% (11)
- Synthese Vis BoulonДокумент1 страницаSynthese Vis BoulonNaoufel Fares100% (1)
- GT1AДокумент1 страницаGT1ANaoufel FaresОценок пока нет
- Calcul de ClavetteДокумент2 страницыCalcul de ClavetteNaoufel Fares100% (1)
- Lecture Dessin EnsembleДокумент17 страницLecture Dessin Ensemblemarwen100% (1)
- Application CLAVETTE PDFДокумент1 страницаApplication CLAVETTE PDFNaoufel FaresОценок пока нет
- GT1DДокумент1 страницаGT1DNaoufel FaresОценок пока нет
- Depliant SeminaireДокумент2 страницыDepliant SeminaireNaoufel FaresОценок пока нет
- GT1CДокумент1 страницаGT1CNaoufel FaresОценок пока нет
- ANNEXEДокумент12 страницANNEXENaoufel FaresОценок пока нет
- GT1BДокумент1 страницаGT1BNaoufel FaresОценок пока нет
- Devoir 3èmeДокумент4 страницыDevoir 3èmeNaoufel FaresОценок пока нет
- Pr-07-Réalisation de La Préparation Des Mises en Fabrication PDFДокумент32 страницыPr-07-Réalisation de La Préparation Des Mises en Fabrication PDFNaoufel Fares100% (1)
- MatériauxДокумент19 страницMatériauxNaoufel FaresОценок пока нет
- CPS Khettara OmariaДокумент30 страницCPS Khettara OmariaMed Tnr EspoirОценок пока нет
- Questions-Calcul Pratique Debits Eau Air Partie 1Документ11 страницQuestions-Calcul Pratique Debits Eau Air Partie 1SADJI RachidОценок пока нет
- Descriptifs Et CCTPДокумент20 страницDescriptifs Et CCTPachraf pro67% (3)
- L Intermediaire D AssuranceДокумент7 страницL Intermediaire D AssuranceMKLSJDQKLMS MLMLLJОценок пока нет
- Energiesafricaines n01Документ35 страницEnergiesafricaines n01amineОценок пока нет
- 2014 Broschuere Tunnelofen en FR Web PDFДокумент9 страниц2014 Broschuere Tunnelofen en FR Web PDFAmeur BouhadjaОценок пока нет
- Guide 5SДокумент83 страницыGuide 5SmohamedОценок пока нет
- Ds5 E-Hdi 115 Etg6 So ChicДокумент5 страницDs5 E-Hdi 115 Etg6 So ChicCourtney JacksonОценок пока нет
- Kit Audio VideoДокумент32 страницыKit Audio VideoArsel BIKECKОценок пока нет
- Marque: Faure Reference: FWF 3135 Blanc CODIC: 2358697Документ25 страницMarque: Faure Reference: FWF 3135 Blanc CODIC: 2358697German ibarsОценок пока нет
- Enquête Satisfaction TotaleДокумент37 страницEnquête Satisfaction TotalePhilippe PopulaireОценок пока нет
- Stratification Des Structures LinguistiquesДокумент13 страницStratification Des Structures LinguistiquesCarlos Sánchez PimientaОценок пока нет
- Les Niveaux Fonctionnels Déterminent Les Fonctionnalités Des Services de Domaine Active DirectoryДокумент5 страницLes Niveaux Fonctionnels Déterminent Les Fonctionnalités Des Services de Domaine Active DirectoryHassan JoussanОценок пока нет
- JapanДокумент62 страницыJapanMohamed KaabОценок пока нет
- Portable Power Solutions (PPS) Postes Électriques Haute Tension Pré-Assemblés Sur Remorque, Sur Skid Ou en Bâtiment Préfabriqué Jusqu À 420 KVДокумент8 страницPortable Power Solutions (PPS) Postes Électriques Haute Tension Pré-Assemblés Sur Remorque, Sur Skid Ou en Bâtiment Préfabriqué Jusqu À 420 KVSamir SassiОценок пока нет
- RR 2020 00013 Vol.I FA5Документ442 страницыRR 2020 00013 Vol.I FA5Z LОценок пока нет
- SCPRДокумент22 страницыSCPRAnonymous FGzNDzIeJОценок пока нет
- Book Professionnel. Architecte Laura Sandoval Paz.Документ9 страницBook Professionnel. Architecte Laura Sandoval Paz.Laura sandovalОценок пока нет
- FC8600 Manuel Utilisateur FRДокумент203 страницыFC8600 Manuel Utilisateur FRCoralineОценок пока нет
- Servo CommandeДокумент16 страницServo CommandeFa BelОценок пока нет