Вам также может понравиться
- Ed Leedskalnin - Magnetic Current (Illustrated)Документ51 страницаEd Leedskalnin - Magnetic Current (Illustrated)anon-8317394% (66)
- Alexanderson Antenna Analysis by Eric DollardДокумент36 страницAlexanderson Antenna Analysis by Eric Dollard~ScaLaR~100% (5)
- Ee580 Notes PDFДокумент119 страницEe580 Notes PDFnageshОценок пока нет
- CLO 3Chapter9Документ80 страницCLO 3Chapter9Muhammad UsmanОценок пока нет
- Transform Methods: X(S) S JW JW SДокумент16 страницTransform Methods: X(S) S JW JW SAbdullahee YeaheryeaОценок пока нет
- Laplace TransformДокумент98 страницLaplace TransformMihail ColunОценок пока нет
- Motivation For Fourier SeriesДокумент18 страницMotivation For Fourier Serieshamza abdo mohamoudОценок пока нет
- Transfer Functions: PrerequisitesДокумент12 страницTransfer Functions: PrerequisitesthotalnОценок пока нет
- Advanced Control SystemsДокумент81 страницаAdvanced Control Systemsanoop sathyanОценок пока нет
- Laplace Transform-Signal ProcessingДокумент41 страницаLaplace Transform-Signal ProcessingstanculeanuОценок пока нет
- Circuit Analysis in S-DomainДокумент22 страницыCircuit Analysis in S-Domainshreyas_stinsonОценок пока нет
- IntroductionДокумент14 страницIntroductionslo803421Оценок пока нет
- Laplace, Z Transform and Frequency Response: Experiment 10Документ7 страницLaplace, Z Transform and Frequency Response: Experiment 10Engr Haseena JabbarОценок пока нет
- Mece306 ch02 2019 20Документ82 страницыMece306 ch02 2019 20Eren ÖzataОценок пока нет
- C-T Systems Laplace Transform Solving Differential EquationsДокумент21 страницаC-T Systems Laplace Transform Solving Differential Equationshamza abdo mohamoudОценок пока нет
- Signal Sapce RepresentationДокумент41 страницаSignal Sapce RepresentationHarshitPalОценок пока нет
- An Over View of Digital Control SystemДокумент46 страницAn Over View of Digital Control SystemAnimesh JainОценок пока нет
- Application of Laplace TransformДокумент35 страницApplication of Laplace TransformSingappuli100% (1)
- ELE 301, Fall 2010 Laboratory No. 7 Stability and Root Locus PlotsДокумент4 страницыELE 301, Fall 2010 Laboratory No. 7 Stability and Root Locus PlotsAnonymous WkbmWCa8MОценок пока нет
- Ss Important QuestionsДокумент21 страницаSs Important QuestionsVeera ChaitanyaОценок пока нет
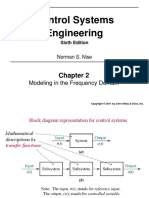
- CHAPTER 1 Modeling in The Frequency DomainДокумент17 страницCHAPTER 1 Modeling in The Frequency DomainAnnette TageufoueОценок пока нет
- Autocorrelation LTI SystemДокумент12 страницAutocorrelation LTI Systemmadsud69Оценок пока нет
- 2-Mark Questions Anna University Signals and SystemsДокумент11 страниц2-Mark Questions Anna University Signals and SystemsSonu100% (2)
- Chapter-1: 1.1 Control Design ProcedureДокумент23 страницыChapter-1: 1.1 Control Design ProcedureWildan MumtazОценок пока нет
- Unit Iv: Continuous and Discrete Time SystemsДокумент32 страницыUnit Iv: Continuous and Discrete Time SystemsAnbazhagan SelvanathanОценок пока нет
- Fourier Transform: (1, 0) (0, 1) (X, Y) X (1, 0) + y (0, 1)Документ4 страницыFourier Transform: (1, 0) (0, 1) (X, Y) X (1, 0) + y (0, 1)Fadi Awni EleiwiОценок пока нет
- Process Control Transfer FunctionsДокумент16 страницProcess Control Transfer FunctionsAnonymous 0zrCNQОценок пока нет
- A Signal Is Defined As Any Physical A Quantity That Vaies Witin TimeДокумент13 страницA Signal Is Defined As Any Physical A Quantity That Vaies Witin Timeel09612033Оценок пока нет
- Dynamics and Differential EquationsДокумент30 страницDynamics and Differential EquationsHusseinali HusseinОценок пока нет
- Linear System and BackgroundДокумент24 страницыLinear System and BackgroundEdmilson_Q_FilhoОценок пока нет
- Unit 3Документ113 страницUnit 3Jai Sai RamОценок пока нет
- Digital Control System - CompressedДокумент18 страницDigital Control System - CompressedSukhpal SinghОценок пока нет
- SsДокумент19 страницSssudha_zonesОценок пока нет
- Lab 4. LTI Systems, The Z-Transform, and An Introduc-Tion To FilteringДокумент15 страницLab 4. LTI Systems, The Z-Transform, and An Introduc-Tion To Filteringcuterose95Оценок пока нет
- Lesson 1Документ27 страницLesson 1Batuhan ÇolaklarОценок пока нет
- Digital Signal ProcessingДокумент22 страницыDigital Signal Processingtdhinakaran100% (1)
- Linear SystemsДокумент9 страницLinear SystemsAhmed M H Al-YousifОценок пока нет
- Digital Control Systems z-Transform AnalysisДокумент22 страницыDigital Control Systems z-Transform Analysisvignanaraj100% (1)
- Laplas TransformДокумент17 страницLaplas TransformRatnakar PatilОценок пока нет
- Lecture 04 - Signal Space Approach and Gram Schmidt ProcedureДокумент20 страницLecture 04 - Signal Space Approach and Gram Schmidt ProcedureKhoa PhamОценок пока нет
- Notes On Phasors: 1.1 Time-Harmonic Physical QuantitiesДокумент11 страницNotes On Phasors: 1.1 Time-Harmonic Physical QuantitiesonezimocardosoОценок пока нет
- SEO-Optimized Title for Signals and Systems DocumentДокумент0 страницSEO-Optimized Title for Signals and Systems DocumentBinu VelambilОценок пока нет
- Signals and Systems Chapter 3 OutlineДокумент12 страницSignals and Systems Chapter 3 OutlineMuhammet ÖzdemirОценок пока нет
- EMTH202-Lecture 13 (20-03-2023)Документ25 страницEMTH202-Lecture 13 (20-03-2023)Naledi KetlogetsweОценок пока нет
- Signals-and-Systems - Basics & Formula HandbookДокумент19 страницSignals-and-Systems - Basics & Formula HandbookKALAIMATHI100% (15)
- Automatic Control Systems: Transfer FunctionsДокумент23 страницыAutomatic Control Systems: Transfer FunctionsMU Len GAОценок пока нет
- FourierseriesДокумент13 страницFourierseriesSuhaimi SulaimanОценок пока нет
- EE263 Autumn 2013-14 homework problemsДокумент153 страницыEE263 Autumn 2013-14 homework problemsHimanshu Saikia JОценок пока нет
- Linear Systems Chapter AnalysisДокумент44 страницыLinear Systems Chapter AnalysisrajuvadlakondaОценок пока нет
- Signals Are Variables That Carry Information - Systems Process Input Signals To Produce Output SignalsДокумент10 страницSignals Are Variables That Carry Information - Systems Process Input Signals To Produce Output Signalsking_hhhОценок пока нет
- Ni Two Marks - NewДокумент37 страницNi Two Marks - NewAnuishuya SugumaranОценок пока нет
- Jordan Form and Rational Form ExplainedДокумент7 страницJordan Form and Rational Form ExplainedSergiu GocanОценок пока нет
- EE 4314 - Control Systems: Transfer Function and Ode SolutionДокумент5 страницEE 4314 - Control Systems: Transfer Function and Ode SolutionTimothy FieldsОценок пока нет
- Kendall NumtreatДокумент12 страницKendall NumtreatallinacОценок пока нет
- Laplace TransformationДокумент10 страницLaplace TransformationAhasan UllaОценок пока нет
- Frequency Response Analysis: Karl D. Hammond January 2008Документ14 страницFrequency Response Analysis: Karl D. Hammond January 2008Trixie NuylesОценок пока нет
- EC1252 Signals & Systems General Overview (Courtesy REC)Документ74 страницыEC1252 Signals & Systems General Overview (Courtesy REC)jeyaganesh100% (1)
- Module4 Signals and Systems LTДокумент9 страницModule4 Signals and Systems LTAkul PaiОценок пока нет
- LS-convolution BasicДокумент5 страницLS-convolution BasicnazmulОценок пока нет
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- Belli Melvin pt05 PDFДокумент40 страницBelli Melvin pt05 PDFDavid TurnerОценок пока нет
- Paper On Cogging Torque Reduction in PMG of WTGДокумент8 страницPaper On Cogging Torque Reduction in PMG of WTGSatadal DashОценок пока нет
- Atomic Hydrogen WeldingДокумент2 страницыAtomic Hydrogen WeldingDavid TurnerОценок пока нет
- KoronaДокумент40 страницKoronaOrestis VelmachosОценок пока нет
- Cog GoodДокумент3 страницыCog GoodDavid TurnerОценок пока нет
- Gas - Lled Laser-Triggered Spark GapДокумент5 страницGas - Lled Laser-Triggered Spark GapDavid TurnerОценок пока нет
- Electric Arc FurnaceДокумент9 страницElectric Arc FurnaceDavid TurnerОценок пока нет
- Belli Melvin pt05 PDFДокумент40 страницBelli Melvin pt05 PDFDavid TurnerОценок пока нет
- Scientists Create A New Kind of Matter - Time CrystalsДокумент8 страницScientists Create A New Kind of Matter - Time CrystalsDavid TurnerОценок пока нет
- Plasma PhysicsДокумент6 страницPlasma PhysicsDavid TurnerОценок пока нет
- The Spark Gap - Toward OverunityДокумент5 страницThe Spark Gap - Toward OverunityDavid TurnerОценок пока нет
- ChristophSchlensok FinalPaperДокумент10 страницChristophSchlensok FinalPaperDavid TurnerОценок пока нет
- Arc FlashДокумент7 страницArc FlashDavid TurnerОценок пока нет
- Fundamental Physical Considerations For Ultrafast Spark Gap SwitchingДокумент12 страницFundamental Physical Considerations For Ultrafast Spark Gap SwitchingDavid TurnerОценок пока нет
- ShadowProtect Quick Start GuideДокумент4 страницыShadowProtect Quick Start GuideDavid TurnerОценок пока нет
- 114 Aupec01Документ6 страниц114 Aupec01David TurnerОценок пока нет
- GenRad Experimenter Dec 1955Документ12 страницGenRad Experimenter Dec 1955David TurnerОценок пока нет
- 001Документ6 страниц001David TurnerОценок пока нет
- 10 1 1 97 1291Документ21 страница10 1 1 97 1291David TurnerОценок пока нет
- 2003001138Документ11 страниц2003001138David TurnerОценок пока нет
- Awesome CoggingДокумент6 страницAwesome CoggingDavid TurnerОценок пока нет
- Analytical Model For Permanent Magnet Motors With Surface Mounted MagnetsДокумент6 страницAnalytical Model For Permanent Magnet Motors With Surface Mounted MagnetsIndra PrakashОценок пока нет
- TechДокумент15 страницTechDavid TurnerОценок пока нет
- ProdДокумент45 страницProdDavid TurnerОценок пока нет
- Property Symbol Unit PZT401 PZT402 PZT403 PZT404 PZT405 PZT406 No of Days After Poling 1 1 1 1 1 1 Electrical - Low FieldДокумент7 страницProperty Symbol Unit PZT401 PZT402 PZT403 PZT404 PZT405 PZT406 No of Days After Poling 1 1 1 1 1 1 Electrical - Low FieldDavid TurnerОценок пока нет
- Piezoelectric TechnologyДокумент17 страницPiezoelectric TechnologydkrjhaОценок пока нет
- MaterДокумент19 страницMaterDavid TurnerОценок пока нет
- Magnetoelastic Behavior of A Ferrogel in A Homogeneous Magnetic FieldДокумент2 страницыMagnetoelastic Behavior of A Ferrogel in A Homogeneous Magnetic FieldDavid TurnerОценок пока нет