Вам также может понравиться
- An Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksОт EverandAn Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksОценок пока нет
- Unit 8: Robotics: The Origins of RobotsДокумент29 страницUnit 8: Robotics: The Origins of RobotsshivaОценок пока нет
- Unit - 1 - History, Robotic Configurations, Criteria For Defining A Robot and Robot CategoriesДокумент16 страницUnit - 1 - History, Robotic Configurations, Criteria For Defining A Robot and Robot CategoriesNihar MehtaОценок пока нет
- Unit 8: Robotics: The Origins of RobotsДокумент29 страницUnit 8: Robotics: The Origins of RobotsvinayaОценок пока нет
- Revision 4th UnitДокумент80 страницRevision 4th UnitMICHEL RAJОценок пока нет
- Me0506 Robotics Engg: Classification and Types of RobotДокумент65 страницMe0506 Robotics Engg: Classification and Types of RobotSiva ShankarОценок пока нет
- An Introduction To Robotics Dr. Bob Williams, Mechanical Engineering, Ohio UniversityДокумент25 страницAn Introduction To Robotics Dr. Bob Williams, Mechanical Engineering, Ohio UniversitySertaç MalkoçОценок пока нет
- Introduction To RoboticsДокумент27 страницIntroduction To Roboticsmech roboОценок пока нет
- Unit - 1 - IntroductionДокумент61 страницаUnit - 1 - IntroductionSatheesh KumarОценок пока нет
- Robotics 01Документ45 страницRobotics 0133majeesamir66Оценок пока нет
- Mechanical Engineering Computer Integrated Manufacturing Systems Robotics NotesДокумент29 страницMechanical Engineering Computer Integrated Manufacturing Systems Robotics NotesJoyОценок пока нет
- CREATIVE TECHNOLOGIES NotesДокумент6 страницCREATIVE TECHNOLOGIES NotessilverОценок пока нет
- Unit Iv Introduction To Idustrial RobotsДокумент16 страницUnit Iv Introduction To Idustrial RobotsBADINEHALSANDEEPОценок пока нет
- Week 1 Robotics Lecture 1Документ63 страницыWeek 1 Robotics Lecture 1Charlton S.InaoОценок пока нет
- Intro RobДокумент16 страницIntro RobGanesh Babu100% (1)
- Unit 4: Introduction To Robot Fundamentals: MEL459: Mechatronics & RoboticsДокумент70 страницUnit 4: Introduction To Robot Fundamentals: MEL459: Mechatronics & RoboticsKashish VermaОценок пока нет
- Robotics 1Документ14 страницRobotics 1Riz WanОценок пока нет
- Rohini 63738728871Документ10 страницRohini 63738728871Leonard MwijageОценок пока нет
- 3arm Robot Mini FinalДокумент49 страниц3arm Robot Mini FinalWebsoft Tech-HydОценок пока нет
- Robotics (BS)Документ47 страницRobotics (BS)Anupama YadavОценок пока нет
- RoboticsДокумент42 страницыRoboticsMarini Pramod KumarОценок пока нет
- ROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirДокумент7 страницROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirrahulcoolhutОценок пока нет
- Introduction To Robotics: 1.1.what Is A Robot?Документ21 страницаIntroduction To Robotics: 1.1.what Is A Robot?Dinesh KumarОценок пока нет
- Robotic NotesДокумент16 страницRobotic Noteskeerthana murugeswaranОценок пока нет
- Industrial Robotics: Prashanth BN Assistant Professor Department of Mechanical Engineering Amrita School of EngineeringДокумент52 страницыIndustrial Robotics: Prashanth BN Assistant Professor Department of Mechanical Engineering Amrita School of EngineeringPrashanth BnОценок пока нет
- Robotics c1Документ24 страницыRobotics c1Md. Faysal Alam RiyadОценок пока нет
- Unit1 Part2Документ29 страницUnit1 Part2Sharmila83Оценок пока нет
- Industrial RobotsДокумент15 страницIndustrial RobotsLW LuWee ChongОценок пока нет
- RoboticsДокумент39 страницRoboticsEysi WideОценок пока нет
- Me445 Robotics 2Документ143 страницыMe445 Robotics 2زهديابوانسОценок пока нет
- All UnitДокумент83 страницыAll UnitShiek TiwariОценок пока нет
- Week 1Документ47 страницWeek 1MohanОценок пока нет
- Lecture 2Документ36 страницLecture 2Wajdi SadiqОценок пока нет
- Introduction To Robotics PDFДокумент16 страницIntroduction To Robotics PDFvegamasterinОценок пока нет
- Robotics 2023Документ3 страницыRobotics 2023samu.barman04Оценок пока нет
- Introduction To RoboticsДокумент19 страницIntroduction To RoboticsOngОценок пока нет
- Unit1 - Basic ConceptsДокумент73 страницыUnit1 - Basic ConceptsSharmila83Оценок пока нет
- Mechatronica 2 MechanicsДокумент63 страницыMechatronica 2 MechanicsHahhaah BbbОценок пока нет
- RoboticsДокумент27 страницRoboticsUsama SpiffyОценок пока нет
- Principles of RoboticsДокумент81 страницаPrinciples of RoboticssvenkatprasatОценок пока нет
- A Biped Walking Machine: Table of ContentsДокумент21 страницаA Biped Walking Machine: Table of ContentsWenderson PaulaОценок пока нет
- Robotics Unit-1 (2m)Документ3 страницыRobotics Unit-1 (2m)Sri Suriya SОценок пока нет
- Vision Guided RoboticsДокумент13 страницVision Guided RoboticsVijay ShivakumarОценок пока нет
- Unit1 - Fundamentals of Robotics - Industrial RoboticsДокумент60 страницUnit1 - Fundamentals of Robotics - Industrial RoboticsShankar PawarОценок пока нет
- Robotics in Indian Industry: Ananya BanerjeeДокумент6 страницRobotics in Indian Industry: Ananya BanerjeesafasОценок пока нет
- Term Paper OF Machanics PHY-101 Subject:-: Industrial RoboticsДокумент15 страницTerm Paper OF Machanics PHY-101 Subject:-: Industrial Roboticsvishwajeet89Оценок пока нет
- Seminar ReportДокумент18 страницSeminar ReportCS084Rishav SinghОценок пока нет
- Lesson 1Документ5 страницLesson 1Angela Rose AguilaОценок пока нет
- Seminar Presentation: RoboticsДокумент22 страницыSeminar Presentation: RoboticsPramodPradhanОценок пока нет
- Ntroduction TO Obot AND OboticsДокумент12 страницNtroduction TO Obot AND OboticsHassan allaОценок пока нет
- 2.history of RoboticsДокумент12 страниц2.history of RoboticsSai RamОценок пока нет
- Intro To RobotДокумент43 страницыIntro To RobotHarsha VardhanОценок пока нет
- Module 2.1 - Industrial RobotsДокумент46 страницModule 2.1 - Industrial Robotsarneey2Оценок пока нет
- D1.2 Basics of RoboticsДокумент8 страницD1.2 Basics of RoboticsTanya AayogОценок пока нет
- ROBOTICSДокумент28 страницROBOTICSOsama Azeem0% (1)
- Introduction To RoboticsДокумент17 страницIntroduction To Roboticse_readerОценок пока нет
- Chapter 1Документ50 страницChapter 1Genet GezehagnОценок пока нет
- Chap1 PDFДокумент34 страницыChap1 PDFErdem Yusuf GökdumanОценок пока нет
- Final Report For IndustrialДокумент32 страницыFinal Report For IndustrialJecren Godinez BoocОценок пока нет
- FPR de Weck Jul 1 2012Документ59 страницFPR de Weck Jul 1 2012rmОценок пока нет
- Image Encryption and Decryption Using Triple Des Algorithm: Submitted byДокумент34 страницыImage Encryption and Decryption Using Triple Des Algorithm: Submitted bySreejith SОценок пока нет
- Denon Avr-1613 Owners ManualДокумент131 страницаDenon Avr-1613 Owners ManuallerondotОценок пока нет
- SAP - ABAP CDS Development User Guide: WarningДокумент91 страницаSAP - ABAP CDS Development User Guide: WarningKrishna Kshera SagareОценок пока нет
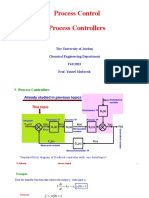
- Process Control - Chapter 7JUДокумент42 страницыProcess Control - Chapter 7JUY MuОценок пока нет
- Level 50 - How Can CSP Partners Build A Business With AzureДокумент56 страницLevel 50 - How Can CSP Partners Build A Business With Azureaki koshaОценок пока нет
- IT8711-FOSS and Cloud Computing Lab Manual ValliammaiДокумент128 страницIT8711-FOSS and Cloud Computing Lab Manual ValliammaihariniОценок пока нет
- Lab ManualДокумент10 страницLab ManualtheОценок пока нет
- Recommended Practices For CNG Fueling Station Design, Construction and OperationДокумент35 страницRecommended Practices For CNG Fueling Station Design, Construction and OperationStefan GhОценок пока нет
- SRAN13.1&15.0 NSA Networking Based On EPC-20180905Документ24 страницыSRAN13.1&15.0 NSA Networking Based On EPC-20180905Mohammed Babar Ahmed100% (2)
- Safety Culture in Nuclear InstalationsДокумент98 страницSafety Culture in Nuclear InstalationschrissbansОценок пока нет
- Government Approved Workshop Gazette NotificationДокумент9 страницGovernment Approved Workshop Gazette NotificationadheesОценок пока нет
- The Osint Cyber War 2021-02-22Документ26 страницThe Osint Cyber War 2021-02-22Carlos Alberto Mendes BetinhoОценок пока нет
- Experiment # 1: MATLAB Basics For Communication System Design ObjectiveДокумент19 страницExperiment # 1: MATLAB Basics For Communication System Design ObjectiveSyed F. JОценок пока нет
- Pioneer PLX 500kДокумент15 страницPioneer PLX 500kFabiОценок пока нет
- Stabila 196-2 Elettronica ENДокумент22 страницыStabila 196-2 Elettronica ENJohn WalesОценок пока нет
- Prime Time FeaturesДокумент15 страницPrime Time FeaturesPruthwish PatelОценок пока нет
- 4ipnet Solution HotelДокумент27 страниц4ipnet Solution HotelAdrian Gamboa MarcellanaОценок пока нет
- 15kw - SN College - SLDДокумент1 страница15kw - SN College - SLDmebin k XavierОценок пока нет
- Frizz Dual ManualДокумент2 страницыFrizz Dual ManualManuel Francisco de PereaОценок пока нет
- OpTransactionHistory02 12 2019Документ4 страницыOpTransactionHistory02 12 2019Vijay KumarОценок пока нет
- Laptop Sebagai Teman Siswa: Laptop As Students' FriendДокумент1 страницаLaptop Sebagai Teman Siswa: Laptop As Students' Friendtigor lianda manik07Оценок пока нет
- Nvidia DGX Os 4 Server: Software Release NotesДокумент19 страницNvidia DGX Os 4 Server: Software Release Notesloreto07Оценок пока нет
- Question Bank CHPT 1,2,6Документ6 страницQuestion Bank CHPT 1,2,61707pateldeepОценок пока нет
- TechCorner 05 - Productivity3000 Ramp, Ramp Generator, Find Min and MaxДокумент4 страницыTechCorner 05 - Productivity3000 Ramp, Ramp Generator, Find Min and MaxQuantumAutomationОценок пока нет
- Edukasyong Pantahanan at Pangkabuhayan and Technology and Livelihood Education Grades 4-6 December 2013 PDFДокумент41 страницаEdukasyong Pantahanan at Pangkabuhayan and Technology and Livelihood Education Grades 4-6 December 2013 PDFKei OnderОценок пока нет
- Troubleshoot EMC CelerraVNX IntegrationДокумент3 страницыTroubleshoot EMC CelerraVNX IntegrationchengabОценок пока нет
- Lecture 2.2.4 StringsДокумент12 страницLecture 2.2.4 Stringssiyalohia8Оценок пока нет
- Thesis Submission Certificate FormatДокумент6 страницThesis Submission Certificate Formatmichellespragueplano100% (3)
- Network Design CookbookДокумент412 страницNetwork Design Cookbookanon_73609093763% (8)
- The Future of Geography: How the Competition in Space Will Change Our WorldОт EverandThe Future of Geography: How the Competition in Space Will Change Our WorldРейтинг: 4 из 5 звезд4/5 (6)
- Generative AI: The Insights You Need from Harvard Business ReviewОт EverandGenerative AI: The Insights You Need from Harvard Business ReviewРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyОт EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyРейтинг: 3.5 из 5 звезд3.5/5 (111)
- Cyber War: The Next Threat to National Security and What to Do About ItОт EverandCyber War: The Next Threat to National Security and What to Do About ItРейтинг: 3.5 из 5 звезд3.5/5 (66)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziОт Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziОценок пока нет
- Algorithms to Live By: The Computer Science of Human DecisionsОт EverandAlgorithms to Live By: The Computer Science of Human DecisionsРейтинг: 4.5 из 5 звезд4.5/5 (722)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldОт EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (55)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyОт EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyРейтинг: 4 из 5 звезд4/5 (51)
- The E-Myth Revisited: Why Most Small Businesses Don't Work andОт EverandThe E-Myth Revisited: Why Most Small Businesses Don't Work andРейтинг: 4.5 из 5 звезд4.5/5 (709)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyОт EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyОценок пока нет
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОт EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОценок пока нет
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.От EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Рейтинг: 5 из 5 звезд5/5 (34)
- AI Superpowers: China, Silicon Valley, and the New World OrderОт EverandAI Superpowers: China, Silicon Valley, and the New World OrderРейтинг: 4.5 из 5 звезд4.5/5 (399)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldОт EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (107)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceОт EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceРейтинг: 5 из 5 звезд5/5 (5)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumОт EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumРейтинг: 3 из 5 звезд3/5 (12)
- Restoration Agriculture: Real-World Permaculture for FarmersОт EverandRestoration Agriculture: Real-World Permaculture for FarmersРейтинг: 4.5 из 5 звезд4.5/5 (86)
- The Bitcoin Standard: The Decentralized Alternative to Central BankingОт EverandThe Bitcoin Standard: The Decentralized Alternative to Central BankingРейтинг: 4.5 из 5 звезд4.5/5 (41)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- AP Computer Science A Premium, 2024: 6 Practice Tests + Comprehensive Review + Online PracticeОт EverandAP Computer Science A Premium, 2024: 6 Practice Tests + Comprehensive Review + Online PracticeОценок пока нет