Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- A Passive Series, Active Shunt Filter For High Power ApplicationsДокумент6 страницA Passive Series, Active Shunt Filter For High Power Applicationslacan021Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Indirect Current Control of LCL Based Shunt Active Power FilterДокумент10 страницIndirect Current Control of LCL Based Shunt Active Power FilterArsham5033Оценок пока нет
- Lesson No. 3 LectureДокумент56 страницLesson No. 3 LectureJay ZacariasОценок пока нет
- Wcecs2009 - pp545-549 Computer LoadsДокумент5 страницWcecs2009 - pp545-549 Computer LoadsYogesh MsdОценок пока нет
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОт EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОценок пока нет
- Three Phase Shunt Hybrid Filters For The Current Harmonics Suppression and The Reactive Power CompensationДокумент11 страницThree Phase Shunt Hybrid Filters For The Current Harmonics Suppression and The Reactive Power CompensationHemanth Kumar RajendakumarОценок пока нет
- A Variable Switching Frequency With Boost Power Factor Correction ConverterДокумент8 страницA Variable Switching Frequency With Boost Power Factor Correction ConverterJaya AhujaОценок пока нет
- Active Filter Compensation: Single-Phase Power For HarmonicДокумент5 страницActive Filter Compensation: Single-Phase Power For HarmonicĐỗ TrườngОценок пока нет
- Lab 3Документ5 страницLab 3معتصم الكاملОценок пока нет
- Design Implementation of Power Filter: Hybrid ActiveДокумент5 страницDesign Implementation of Power Filter: Hybrid ActiveSpecial2424Оценок пока нет
- Theory of Switched Mode Power SupplyДокумент21 страницаTheory of Switched Mode Power Supplyseahate100% (1)
- Class E Amp Design PDFДокумент12 страницClass E Amp Design PDFAshutoshSharmaОценок пока нет
- Power Supply Description: Naresh I TechnolgiesДокумент14 страницPower Supply Description: Naresh I Technolgiesreddyece402Оценок пока нет
- Full Wave RectifierДокумент10 страницFull Wave RectifierVenkata PavanОценок пока нет
- Harmonic Effects On Power System EquipmentДокумент12 страницHarmonic Effects On Power System EquipmentCalin AvramescuОценок пока нет
- Bmen3120 Project1 Frequency Selective Circuit 1Документ12 страницBmen3120 Project1 Frequency Selective Circuit 1api-3139933760% (2)
- Slup205 Transformer and Inductor DesignДокумент29 страницSlup205 Transformer and Inductor DesignmirscrОценок пока нет
- Hybrid-Active Filtering of Harmonic Currents Power SystemsДокумент7 страницHybrid-Active Filtering of Harmonic Currents Power Systemspersian67Оценок пока нет
- Voltaje Source InverterДокумент9 страницVoltaje Source Invertercarra80Оценок пока нет
- Digital Current Limiting Techniques For Switching Power Supplies PDFДокумент9 страницDigital Current Limiting Techniques For Switching Power Supplies PDFAdolfo A HerreraОценок пока нет
- TR Netzfilter-Die Letzte Huerde Im Schaltnetzteil enДокумент9 страницTR Netzfilter-Die Letzte Huerde Im Schaltnetzteil enDavid Isaias Jaimes ReyesОценок пока нет
- Ripple (Electrical) - WikipediaДокумент8 страницRipple (Electrical) - WikipediaXI - TITL 121M. Bagas Sandika PratamaОценок пока нет
- Centre Tapped Transformer SpecificationsДокумент4 страницыCentre Tapped Transformer SpecificationsALNATRON GROUPSОценок пока нет
- Lem In2000 Paper v4b SroДокумент9 страницLem In2000 Paper v4b SromarinkokОценок пока нет
- Computation of Transformer Losses Under The Effects of Non-Sinusoidal CurrentsДокумент14 страницComputation of Transformer Losses Under The Effects of Non-Sinusoidal CurrentsAnonymous IlrQK9HuОценок пока нет
- Section - IДокумент19 страницSection - IRavee SankarОценок пока нет
- Unit-5 - Harmonics & FiltersДокумент10 страницUnit-5 - Harmonics & Filtersravikumar_ranganОценок пока нет
- Power Factor Correction TypesДокумент7 страницPower Factor Correction TypessachinОценок пока нет
- Slup 075Документ12 страницSlup 075Gowtham SanampalliОценок пока нет
- Virtual Instrument Based Fault Classification in Power Transformers Using Artificial Neural NetworksДокумент5 страницVirtual Instrument Based Fault Classification in Power Transformers Using Artificial Neural NetworksNituОценок пока нет
- An Electronic Ballast With Power Factor Correction For Fluorescent LampsДокумент5 страницAn Electronic Ballast With Power Factor Correction For Fluorescent Lampsjeeva_ebookОценок пока нет
- ENEL585 Lab1Документ4 страницыENEL585 Lab1phanioletyОценок пока нет
- A Method To Reduce Neutral Current in Three Phase Four Wire Electric Distribution Systems by Using Active Power FilterДокумент4 страницыA Method To Reduce Neutral Current in Three Phase Four Wire Electric Distribution Systems by Using Active Power FilterStedroy RoacheОценок пока нет
- Advantages of Bridge Rectifier Circuit Over CenterДокумент4 страницыAdvantages of Bridge Rectifier Circuit Over CenterLemuel C. FernandezОценок пока нет
- EEEN40197 Lecture Notes AJF PDFДокумент46 страницEEEN40197 Lecture Notes AJF PDFAnonymous gVhwdk9ui9Оценок пока нет
- Omega Type ETB-29 Lab Manual (CURAJ)Документ18 страницOmega Type ETB-29 Lab Manual (CURAJ)McMillerОценок пока нет
- A Single-Phase Power Series Compensator For Voltage DistortionДокумент5 страницA Single-Phase Power Series Compensator For Voltage Distortionsudheer_kumar_22Оценок пока нет
- Power Quality Enhancement and Mitigation of Voltage Sag Using DPFCДокумент7 страницPower Quality Enhancement and Mitigation of Voltage Sag Using DPFCVijay KrishnaОценок пока нет
- دايود ريكتفايرДокумент7 страницدايود ريكتفايرalamryzhra62Оценок пока нет
- A Single-Phase High Power Factor Rectifier, Based On A Two-Quadrant Shunt Active FilterДокумент14 страницA Single-Phase High Power Factor Rectifier, Based On A Two-Quadrant Shunt Active FilterNirmal Kumar PandeyОценок пока нет
- Mariusz MalinowskiДокумент128 страницMariusz Malinowskiahmadusman123Оценок пока нет
- Chapter One Semi Conductor DevicesДокумент50 страницChapter One Semi Conductor DevicesbirhanuОценок пока нет
- Automatic Hand Washing SystemДокумент10 страницAutomatic Hand Washing SystemmathuraОценок пока нет
- Single-Phase Supply Three-Phase Supply: Half-Wave RectificationДокумент7 страницSingle-Phase Supply Three-Phase Supply: Half-Wave RectificationKhushbakht KhushiОценок пока нет
- Ac Link Buck Boost ConverterДокумент6 страницAc Link Buck Boost ConverterrigowОценок пока нет
- Pneumatic Based Punching MachineДокумент45 страницPneumatic Based Punching Machineraja100% (3)
- Rectifier Operation PDFДокумент11 страницRectifier Operation PDFaliОценок пока нет
- Harmonic Reduction by Using Shunt Hybrid Power Filter: Kavita Dewangan Prof. Pawan C. TapreДокумент9 страницHarmonic Reduction by Using Shunt Hybrid Power Filter: Kavita Dewangan Prof. Pawan C. TapreInternational Journal of computational Engineering research (IJCER)Оценок пока нет
- Zero CrossingДокумент16 страницZero CrossingAryan KapsОценок пока нет
- Question AnswersДокумент4 страницыQuestion Answershamza akhtarОценок пока нет
- A Buad Power SectionДокумент7 страницA Buad Power SectionSamОценок пока нет
- Basic ElectronicsДокумент8 страницBasic Electronicsengineer.chiranjitОценок пока нет
- Ripple Current Analysis of Three-Level Inverter Based On SVPWM and Design of LCL FilterДокумент7 страницRipple Current Analysis of Three-Level Inverter Based On SVPWM and Design of LCL FilterAnonymous eCmTYonQ84Оценок пока нет
- Man Dache 2006Документ5 страницMan Dache 2006Radouan RadwanОценок пока нет
- Practical 12thДокумент7 страницPractical 12thkumarnareshОценок пока нет
- Switched Mode Power SupplyДокумент153 страницыSwitched Mode Power SupplyIvan222244Оценок пока нет
- FFSQP Manual PDFДокумент46 страницFFSQP Manual PDFtamann2004Оценок пока нет
- Quality Objectives - E 091201 PDFДокумент1 страницаQuality Objectives - E 091201 PDFtamann2004Оценок пока нет
- Ijater 04 22 PDFДокумент6 страницIjater 04 22 PDFtamann2004Оценок пока нет
- Noise Pollution PDFДокумент32 страницыNoise Pollution PDFHassan AliОценок пока нет
- K - FactorTransformerДокумент5 страницK - FactorTransformerAnonymous BanTco100% (1)
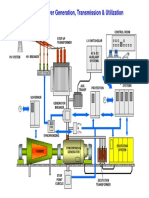
- توليد وإستخدامДокумент1 страницаتوليد وإستخدامtamann2004100% (1)
- Publication Design and Engineering ch41 Ddot PDFДокумент24 страницыPublication Design and Engineering ch41 Ddot PDFtamann2004Оценок пока нет
- Series Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission LinesДокумент3 страницыSeries Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission Linestamann2004Оценок пока нет
- TARIFFSДокумент32 страницыTARIFFStamann2004Оценок пока нет
- A Basic Introduction To Neural NetworksДокумент6 страницA Basic Introduction To Neural Networkstamann2004Оценок пока нет
- Seasonality: T T T TДокумент38 страницSeasonality: T T T Ttamann2004Оценок пока нет
- Single-Tuned Passive Harmonic Filter Design Considering Variances of Tuning and Quality Factor PDFДокумент7 страницSingle-Tuned Passive Harmonic Filter Design Considering Variances of Tuning and Quality Factor PDFtamann2004Оценок пока нет
- Fractional Order Derivative and Integral Using LabVIEWДокумент13 страницFractional Order Derivative and Integral Using LabVIEWauraliusОценок пока нет
- ProbabilityДокумент28 страницProbabilitytamann2004Оценок пока нет
- Laptopy Baterie Zamienniki Cross ReferenceДокумент60 страницLaptopy Baterie Zamienniki Cross ReferenceWieslaw ZadenkoОценок пока нет
- Service Manual: CFD-V17Документ58 страницService Manual: CFD-V17Anonymous Lfgk6vygОценок пока нет
- Chapter 6 Nonequilibrium Excess Carriers in SemiconductorsДокумент35 страницChapter 6 Nonequilibrium Excess Carriers in SemiconductorsTushar Dhabal DasОценок пока нет
- Figure 2.15 Triggering A Silicon-Controlled: Aircraft Electrical and Electronic Systems 42Документ20 страницFigure 2.15 Triggering A Silicon-Controlled: Aircraft Electrical and Electronic Systems 42Jhony BhatОценок пока нет
- SBA (S) 2512 Rev 4Документ4 страницыSBA (S) 2512 Rev 4jvnraoОценок пока нет
- DSE91xx DSE92xx DSE94xx Series Operators ManualДокумент77 страницDSE91xx DSE92xx DSE94xx Series Operators ManualLeopoldo Godinez HernandezОценок пока нет
- Electrical Input Components 326DДокумент7 страницElectrical Input Components 326DBaron KasoziОценок пока нет
- Module 1 - Intro To Communication PDFДокумент15 страницModule 1 - Intro To Communication PDFMark junnel NorberteОценок пока нет
- Ae Viva NotesДокумент8 страницAe Viva NotesMayur PanchalОценок пока нет
- B. Tech. Mechatronics Introd.+Schem+Syllabus 2019 - OnwardsДокумент34 страницыB. Tech. Mechatronics Introd.+Schem+Syllabus 2019 - OnwardsR.Deepak KannaОценок пока нет
- 01 132kV FEEDER HALDIA DUPLEXДокумент55 страниц01 132kV FEEDER HALDIA DUPLEXhbj1990Оценок пока нет
- GFM668-2 Automatic FFFdry Powder FfillerДокумент17 страницGFM668-2 Automatic FFFdry Powder Ffillermazen absiОценок пока нет
- Digital Systems III 2018 by Onke NkqwiliДокумент143 страницыDigital Systems III 2018 by Onke NkqwiliOnke Avr-dude Nkqwili100% (1)
- Transient and Steady-State Analysis of A SEPIC Converter by An Average State-Space ModellingДокумент5 страницTransient and Steady-State Analysis of A SEPIC Converter by An Average State-Space ModellingPablo PulacheОценок пока нет
- 24'' Wide-Screen LCD Monitor User ManualДокумент13 страниц24'' Wide-Screen LCD Monitor User ManualjohnyhopeОценок пока нет
- Multifuge 3 S-R/3 L-R, Legend RT 120V 50/60 HZ Service ManualДокумент74 страницыMultifuge 3 S-R/3 L-R, Legend RT 120V 50/60 HZ Service ManualShan AhmadОценок пока нет
- RNC2600 HW Expansion PDFДокумент15 страницRNC2600 HW Expansion PDFfatehmeОценок пока нет
- Cem7 PDFДокумент11 страницCem7 PDFAly AbdelhamedОценок пока нет
- Tongyu - Tdj-182020dei-65f-02Документ2 страницыTongyu - Tdj-182020dei-65f-02Document OrizaОценок пока нет
- Lab 06 Electrostatic Energy Stored in CapacitorsДокумент10 страницLab 06 Electrostatic Energy Stored in CapacitorsAmjadОценок пока нет
- ISO IEC TS 29125-2017 Amd1-2020Документ16 страницISO IEC TS 29125-2017 Amd1-2020Bunner FastОценок пока нет
- SC 9100 JohnsonControlsДокумент19 страницSC 9100 JohnsonControlsMohammad SaleemОценок пока нет
- MD User Manual PDFДокумент46 страницMD User Manual PDFIvan PetkovОценок пока нет
- Price List Travo LasДокумент21 страницаPrice List Travo Laspei sajaОценок пока нет
- 4WRPE Re29122 - 2017-05Документ24 страницы4WRPE Re29122 - 2017-05Johnny JessingОценок пока нет
- 1.IS Code ListДокумент24 страницы1.IS Code ListholoОценок пока нет
- Automatic Irrigation System Using Soil Moisture Sensor and Temperature Sensor With Microcontroller AT89S52Документ5 страницAutomatic Irrigation System Using Soil Moisture Sensor and Temperature Sensor With Microcontroller AT89S52Mugdha DokeОценок пока нет
- 400V/7A Switching Regulator Applications: Package Dimensions FeaturesДокумент4 страницы400V/7A Switching Regulator Applications: Package Dimensions FeaturesMaikol DominguezОценок пока нет
- VSX 820 KДокумент126 страницVSX 820 KWilson Rojas SantosОценок пока нет
- Functional Description: Sysmex XE-2100 Operator's Manual - Revised July 2007Документ40 страницFunctional Description: Sysmex XE-2100 Operator's Manual - Revised July 2007elom djadoo-ananiОценок пока нет
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldОт EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (55)
- Cyber War: The Next Threat to National Security and What to Do About ItОт EverandCyber War: The Next Threat to National Security and What to Do About ItРейтинг: 3.5 из 5 звезд3.5/5 (66)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОт EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОценок пока нет
- Algorithms to Live By: The Computer Science of Human DecisionsОт EverandAlgorithms to Live By: The Computer Science of Human DecisionsРейтинг: 4.5 из 5 звезд4.5/5 (722)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldОт EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (107)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyОт EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyРейтинг: 3.5 из 5 звезд3.5/5 (111)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceОт EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceРейтинг: 5 из 5 звезд5/5 (5)
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesОт EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesОценок пока нет
- Chip War: The Quest to Dominate the World's Most Critical TechnologyОт EverandChip War: The Quest to Dominate the World's Most Critical TechnologyРейтинг: 4.5 из 5 звезд4.5/5 (228)
- Generative AI: The Insights You Need from Harvard Business ReviewОт EverandGenerative AI: The Insights You Need from Harvard Business ReviewРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Python for Beginners: A Crash Course Guide to Learn Python in 1 WeekОт EverandPython for Beginners: A Crash Course Guide to Learn Python in 1 WeekРейтинг: 4.5 из 5 звезд4.5/5 (7)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziОт Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziОценок пока нет
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- Optimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesОт EverandOptimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesОценок пока нет
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessОт EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessОценок пока нет
- Artificial Intelligence: A Guide for Thinking HumansОт EverandArtificial Intelligence: A Guide for Thinking HumansРейтинг: 4.5 из 5 звезд4.5/5 (30)
- The World's Most Dangerous Geek: And More True Hacking StoriesОт EverandThe World's Most Dangerous Geek: And More True Hacking StoriesРейтинг: 4 из 5 звезд4/5 (49)
- Excel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsОт EverandExcel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsОценок пока нет
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideОт EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideРейтинг: 5 из 5 звезд5/5 (1)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkОт EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkРейтинг: 4 из 5 звезд4/5 (7)
- The Internet Con: How to Seize the Means of ComputationОт EverandThe Internet Con: How to Seize the Means of ComputationРейтинг: 5 из 5 звезд5/5 (6)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceОт EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceОценок пока нет