Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- 85409Документ110 страниц85409arunОценок пока нет
- Mockc SL p2 2018v1Документ11 страницMockc SL p2 2018v1Ammar PasanovicОценок пока нет
- CMC 2009 PDFДокумент25 страницCMC 2009 PDFElevenPlus ParentsОценок пока нет
- Class 9 Math Paper 2023Документ4 страницыClass 9 Math Paper 2023Hamza umrahexpertsОценок пока нет
- Wise Pls PropertiesДокумент51 страницаWise Pls PropertiesSatriani Ni WayanОценок пока нет
- Spatial Mechanisms Lecture NotesДокумент77 страницSpatial Mechanisms Lecture NotesErico Eric100% (1)
- Discrete Mathematics MST PaperДокумент2 страницыDiscrete Mathematics MST PaperDeepak GourОценок пока нет
- TPDE - UNIT I - PPT ClassДокумент153 страницыTPDE - UNIT I - PPT ClassRenish Anto100% (2)
- Math ReflectionДокумент4 страницыMath ReflectionmorganashleyОценок пока нет
- My Name IsДокумент75 страницMy Name IsKriez NamuhujaОценок пока нет
- Chapter 14Документ25 страницChapter 14●●●●●●●1Оценок пока нет
- MTH 130 Assignment1Документ5 страницMTH 130 Assignment1PabloОценок пока нет
- CH#1 Error Analysis & Difference Operators-06-03-2023-Fisrt-FormДокумент66 страницCH#1 Error Analysis & Difference Operators-06-03-2023-Fisrt-FormSyed HuzaifaОценок пока нет
- HILL, Lester S. - Cryptography in An Algebraic AlphabetДокумент8 страницHILL, Lester S. - Cryptography in An Algebraic AlphabetDouglas DanielОценок пока нет
- Basic PysicsДокумент4 страницыBasic PysicshОценок пока нет
- 2017 Metrobank MTAP-DepEd Math ChallengeДокумент56 страниц2017 Metrobank MTAP-DepEd Math ChallengeirecОценок пока нет
- Me - 1 Gtu Cad/cam SyllabusДокумент3 страницыMe - 1 Gtu Cad/cam SyllabusKumar BhattОценок пока нет
- Solomon - Negative NRG in QEDДокумент9 страницSolomon - Negative NRG in QEDHomers SimpsonОценок пока нет
- 9 Ashwani Power System State Estimation PDFДокумент54 страницы9 Ashwani Power System State Estimation PDFDaroyni SaadОценок пока нет
- Velammal Iit and Medical Academy: Integer QuestionsДокумент6 страницVelammal Iit and Medical Academy: Integer Questionsv k (venkat da)Оценок пока нет
- 01 Real NumbersДокумент5 страниц01 Real NumbersJaveria KhanumОценок пока нет
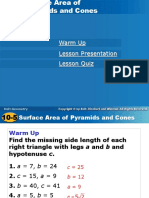
- Warm Up Lesson Presentation Lesson Quiz: Holt Geometry Holt GeometryДокумент34 страницыWarm Up Lesson Presentation Lesson Quiz: Holt Geometry Holt GeometrymdmemaОценок пока нет
- Ahsme 1968 PDFДокумент6 страницAhsme 1968 PDFQFDqОценок пока нет
- 4.5 Determinants and Inverses of 2 X 2 MatricesДокумент3 страницы4.5 Determinants and Inverses of 2 X 2 MatricesthelandofarielleОценок пока нет
- Math For Gr7 and Gr8Документ21 страницаMath For Gr7 and Gr8Reiza MayОценок пока нет
- Grade 10 Math LPДокумент4 страницыGrade 10 Math LPRose SantiagoОценок пока нет
- Measures of Central Tendency and DispersionДокумент13 страницMeasures of Central Tendency and DispersionArlan Joseph LopezОценок пока нет
- TuringДокумент15 страницTuringapi-19970469Оценок пока нет
- FR Choronzon - Liber Cyber PDFДокумент133 страницыFR Choronzon - Liber Cyber PDFaleisterОценок пока нет
- HW 1.2 SolutionsДокумент6 страницHW 1.2 SolutionsArini MelanieОценок пока нет