Вам также может понравиться
- Apollo Configuration Management ManualДокумент308 страницApollo Configuration Management ManualBob Andrepont100% (1)
- Learn Rhino and Grasshopper 3D Modeling OnlineДокумент23 страницыLearn Rhino and Grasshopper 3D Modeling Onlinenanpr100% (1)
- Living in The IT Era ReviewerДокумент3 страницыLiving in The IT Era ReviewerJennelyn Bajado100% (2)
- Learning fuzzy rules from fuzzy decision treesДокумент12 страницLearning fuzzy rules from fuzzy decision treesSandeep DasОценок пока нет
- LabManual For Cryptography and Network SecurityДокумент14 страницLabManual For Cryptography and Network SecurityRajeshkannan Vasinathan100% (2)
- AutoCAD Command ShortcutsДокумент13 страницAutoCAD Command ShortcutsMandel Battikin Gup-ayОценок пока нет
- Missing Enhancement Options For Action ProfilesДокумент20 страницMissing Enhancement Options For Action ProfilesmsankarОценок пока нет
- Non Conformance ReportДокумент1 страницаNon Conformance Reportumar babaОценок пока нет
- Ic3 1Документ11 страницIc3 1Ngô DiễmОценок пока нет
- Detection and Resolution of Anomalies in Firewall Policy RulesДокумент15 страницDetection and Resolution of Anomalies in Firewall Policy RulesGopal SonuneОценок пока нет
- CBAR: An Efficient Method For Mining Association Rules: Yuh-Jiuan Tsay, Jiunn-Yann ChiangДокумент7 страницCBAR: An Efficient Method For Mining Association Rules: Yuh-Jiuan Tsay, Jiunn-Yann Chiangmahapreethi2125Оценок пока нет
- Akyuz - Birbil (2021) - Discovering Classification Rules For Interpretable Learning With Linear Programming-1Документ16 страницAkyuz - Birbil (2021) - Discovering Classification Rules For Interpretable Learning With Linear Programming-1Nishanth TОценок пока нет
- Basic Association RulesДокумент12 страницBasic Association Rulesem01803257Оценок пока нет
- A Genetic-Algorithm For Discovering Small-Disjunct Rules in Data MiningДокумент14 страницA Genetic-Algorithm For Discovering Small-Disjunct Rules in Data MiningAnonymous TxPyX8cОценок пока нет
- Rule Acquisition With A Genetic Algorithm: Robert Cattral Franz Oppacher Dwight DeugoДокумент5 страницRule Acquisition With A Genetic Algorithm: Robert Cattral Franz Oppacher Dwight DeugoindirasivakumarОценок пока нет
- Finding Association Rules that Optimize Accuracy and SupportДокумент12 страницFinding Association Rules that Optimize Accuracy and Supportdavid jhonОценок пока нет
- CBC An Associative Classifier With A Small Number of RulesДокумент8 страницCBC An Associative Classifier With A Small Number of RuleshunghiveОценок пока нет
- Various Rule Pruning Techniques and Accuracy Measures For Fuzzy RulesДокумент4 страницыVarious Rule Pruning Techniques and Accuracy Measures For Fuzzy RulesInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Huang 2011Документ5 страницHuang 2011Khang NguyễnОценок пока нет
- GENETIC ALGORITHM FOR CLASSIFYING SMALL DISJUNCTSДокумент8 страницGENETIC ALGORITHM FOR CLASSIFYING SMALL DISJUNCTSKiran YerragollaОценок пока нет
- A New SQL-like Operator For Mining Association Rules: Rosa MeoДокумент12 страницA New SQL-like Operator For Mining Association Rules: Rosa Meobuan_11Оценок пока нет
- Data MiningДокумент65 страницData MiningbetterlukaroundОценок пока нет
- Binary Decision Diagram Representations of Firewall and Router Access ListsДокумент11 страницBinary Decision Diagram Representations of Firewall and Router Access ListsTanmay NagarОценок пока нет
- Graph InequalitiesДокумент37 страницGraph InequalitiesChristian NolascoОценок пока нет
- Optimization of Mining Association Rule From XML DocumentsДокумент5 страницOptimization of Mining Association Rule From XML DocumentsInternational Organization of Scientific Research (IOSR)Оценок пока нет
- An Effective Heuristic Approach For Hiding Sensitive Patterns in DatabasesДокумент6 страницAn Effective Heuristic Approach For Hiding Sensitive Patterns in DatabasesInternational Organization of Scientific Research (IOSR)Оценок пока нет
- CIKM Final UnexpectedДокумент4 страницыCIKM Final UnexpectedWii NguyenОценок пока нет
- Zou 2022 J. Phys. Conf. Ser. 2146 012015Документ8 страницZou 2022 J. Phys. Conf. Ser. 2146 012015do aiОценок пока нет
- Base Knowledge BasedДокумент14 страницBase Knowledge BasednagaidlОценок пока нет
- An Efficient Method of Data Inconsistency Check For Very Large RelationsДокумент3 страницыAn Efficient Method of Data Inconsistency Check For Very Large RelationsSameer NandanОценок пока нет
- Parallel Data Mining of Association RulesДокумент10 страницParallel Data Mining of Association RulesAvinash MudunuriОценок пока нет
- Efficient Mining of Top-K Sequential Rules: AbstractДокумент14 страницEfficient Mining of Top-K Sequential Rules: AbstractmzqroaxeОценок пока нет
- Evolving Temporal Fuzzy Itemsets from Quantitative DataДокумент8 страницEvolving Temporal Fuzzy Itemsets from Quantitative DataNithi RamОценок пока нет
- Learning Fuzzy Rules With Evolutionary Algorithms - An Analytic ApproachДокумент10 страницLearning Fuzzy Rules With Evolutionary Algorithms - An Analytic ApproachRanjana SodhiОценок пока нет
- Evolutionary Quantum PSO for Mining Association RulesДокумент13 страницEvolutionary Quantum PSO for Mining Association RulesAnonymous TxPyX8cОценок пока нет
- Arules VizДокумент24 страницыArules VizDhio MuhammadОценок пока нет
- Learning Classifier SystemДокумент15 страницLearning Classifier Systemjoshuapeter961204Оценок пока нет
- Generalized Association Rule Mining Using Genetic Algorithms (GAДокумент11 страницGeneralized Association Rule Mining Using Genetic Algorithms (GAAnonymous TxPyX8cОценок пока нет
- Visualizing Association Rules: Introduction To The R-Extension Package ArulesvizДокумент24 страницыVisualizing Association Rules: Introduction To The R-Extension Package ArulesvizDevendraReddyPoreddyОценок пока нет
- Visualizing Association Rules: Introduction To The R-Extension Package ArulesvizДокумент24 страницыVisualizing Association Rules: Introduction To The R-Extension Package ArulesvizDevendraReddyPoreddyОценок пока нет
- Generating Uncertain Fuzzy Logic Rules From SurveysДокумент6 страницGenerating Uncertain Fuzzy Logic Rules From SurveysÄkshãy SaçhånОценок пока нет
- K-Means Clustering Algorithm MCQДокумент8 страницK-Means Clustering Algorithm MCQtirth patelОценок пока нет
- DBMS Unit 3 NotesДокумент29 страницDBMS Unit 3 Notesashwanimpec20Оценок пока нет
- Image Content With Double Hashing Techniques: ISSN No. 2278-3091Документ4 страницыImage Content With Double Hashing Techniques: ISSN No. 2278-3091WARSE JournalsОценок пока нет
- ACN: An Associative Classifier With Negative RulesДокумент7 страницACN: An Associative Classifier With Negative RulesKurumeti Naga Surya Lakshmana KumarОценок пока нет
- Lift (Data Mining)Документ3 страницыLift (Data Mining)isabella343Оценок пока нет
- Decision Models For Record LinkageДокумент15 страницDecision Models For Record LinkageIsaias PrestesОценок пока нет
- Quiz 10 - Regression, Cluster Analysis, & Association AnalysisДокумент3 страницыQuiz 10 - Regression, Cluster Analysis, & Association AnalysisMr.Padmanaban VОценок пока нет
- Assignment 3: Artificial IntelligenceДокумент14 страницAssignment 3: Artificial IntelligenceUday Pratap SinghОценок пока нет
- Expert Systems With Applications: Hamid Reza Qodmanan, Mahdi Nasiri, Behrouz Minaei-BidgoliДокумент11 страницExpert Systems With Applications: Hamid Reza Qodmanan, Mahdi Nasiri, Behrouz Minaei-BidgoliAtik FebrianiОценок пока нет
- Rule Based Expert SystemДокумент2 страницыRule Based Expert SystemBhushanОценок пока нет
- Discovering Stock Price Prediction Rules Using Rough SetsДокумент19 страницDiscovering Stock Price Prediction Rules Using Rough Setss_murugan02Оценок пока нет
- Incremental Resource Allocation using Ripple Down RulesДокумент21 страницаIncremental Resource Allocation using Ripple Down RulesSelma_Salouma_481Оценок пока нет
- Mining Association Rules From Infrequent Itemsets: A SurveyДокумент8 страницMining Association Rules From Infrequent Itemsets: A SurveyKurumeti Naga Surya Lakshmana KumarОценок пока нет
- Efficient Distributed Genetic Algorithm For Rule ExtractionДокумент6 страницEfficient Distributed Genetic Algorithm For Rule ExtractionmiguelangelwwwОценок пока нет
- Mining Optimized Gain RulesДокумент15 страницMining Optimized Gain RulesPatricio ManuelОценок пока нет
- Data Mining AlgoДокумент8 страницData Mining AlgoOm MishraОценок пока нет
- Footprint Based RetrievalPaperДокумент15 страницFootprint Based RetrievalPaperAravind SankarОценок пока нет
- Arules VizДокумент26 страницArules VizMuneesh BajpaiОценок пока нет
- Access Control Policies: Modeling and ValidationДокумент6 страницAccess Control Policies: Modeling and Validationabdel_lakОценок пока нет
- I-:'-Ntrumsu'!I: Model Selection in Neural NetworksДокумент27 страницI-:'-Ntrumsu'!I: Model Selection in Neural Networksniwdex12Оценок пока нет
- Threshold Tuning Improves Classification Association Rule MiningДокумент10 страницThreshold Tuning Improves Classification Association Rule MiningRajee_90Оценок пока нет
- Hiding Sensitive Association Rule Using Heuristic ApproachДокумент7 страницHiding Sensitive Association Rule Using Heuristic ApproachLewis TorresОценок пока нет
- Interestingness Measures For Association Rules Within GroupsДокумент21 страницаInterestingness Measures For Association Rules Within GroupsLeonardo MatteraОценок пока нет
- Studying Complex Adaptive Systems: John H. HollandДокумент8 страницStudying Complex Adaptive Systems: John H. HollandrastalaryОценок пока нет
- Data-Driven Backward Chaining: Abstract: CLIPS Cannot Effectively Perform Sound andДокумент4 страницыData-Driven Backward Chaining: Abstract: CLIPS Cannot Effectively Perform Sound andpurnviОценок пока нет
- Association Rules Selection Using Terminological Ontologies: P. Vidya Sagar, M. Nageswara Rao, P. SowjanyaДокумент6 страницAssociation Rules Selection Using Terminological Ontologies: P. Vidya Sagar, M. Nageswara Rao, P. SowjanyaRakeshconclaveОценок пока нет
- Weight Loss ChartДокумент1 страницаWeight Loss Chartvidi87Оценок пока нет
- 29.5.23 Lab QuestionsДокумент6 страниц29.5.23 Lab Questionsvidi87Оценок пока нет
- Mri Images Thresholding For Alzheimer DetectionДокумент10 страницMri Images Thresholding For Alzheimer DetectionCS & ITОценок пока нет
- Graphics and Multimedia: Unit 1 2D PrimitivesДокумент36 страницGraphics and Multimedia: Unit 1 2D Primitivesvidi87Оценок пока нет
- Screen ShotsДокумент15 страницScreen Shotsvidi87Оценок пока нет
- Eligibility, Parameters, Weightages AICTE-CII Survey 2018Документ6 страницEligibility, Parameters, Weightages AICTE-CII Survey 2018vidi87Оценок пока нет
- (WWW - Entrance-Exam - Net) - IsRO Sample Paper 7Документ6 страниц(WWW - Entrance-Exam - Net) - IsRO Sample Paper 7guptadivyanshuОценок пока нет
- Tnea 2019 OverallДокумент94 страницыTnea 2019 Overallvidi87Оценок пока нет
- 1.principles of ContrastДокумент8 страниц1.principles of Contrastvidi87Оценок пока нет
- Pre ProcessingДокумент9 страницPre Processingvidi87Оценок пока нет
- Formula PaperДокумент3 страницыFormula PaperKampa LavanyaОценок пока нет
- Asst 2 IAPДокумент2 страницыAsst 2 IAPvidi87Оценок пока нет
- c1cd7b4cdd34596 EkДокумент4 страницыc1cd7b4cdd34596 Ekvidi87Оценок пока нет
- Asst 2 IAPДокумент2 страницыAsst 2 IAPvidi87Оценок пока нет
- Automatic Identification and Elimination of Pectoral Muscle in Digital MammogramsДокумент4 страницыAutomatic Identification and Elimination of Pectoral Muscle in Digital Mammogramsvidi87Оценок пока нет
- IiitadvДокумент7 страницIiitadvvidi87Оценок пока нет
- CP7101 Design and Management of Computer Networks Important and Model Question PaperДокумент1 страницаCP7101 Design and Management of Computer Networks Important and Model Question PaperJai SharmaОценок пока нет
- An Introduction To Networking TerminologyДокумент18 страницAn Introduction To Networking Terminologyvidi87Оценок пока нет
- Belief Net FoodSafetyДокумент12 страницBelief Net FoodSafetyvidi87Оценок пока нет
- Excel Multiple Choice QuestionsДокумент31 страницаExcel Multiple Choice QuestionsrajОценок пока нет
- QSD/CHE Department Meeting AgendaДокумент1 страницаQSD/CHE Department Meeting Agendavidi87Оценок пока нет
- Ontologies: Principles, Methods and Applications GuideДокумент69 страницOntologies: Principles, Methods and Applications Guidevidi87Оценок пока нет
- Iiiiiiiiii: Verview OF Omputer YstemsДокумент8 страницIiiiiiiiii: Verview OF Omputer YstemscristigoОценок пока нет
- CP Question BankДокумент4 страницыCP Question Bankvidi87Оценок пока нет
- 00839119Документ5 страниц00839119vidi87Оценок пока нет
- 16Документ18 страниц16vidi87Оценок пока нет
- Day 3 - PeopleCodeДокумент27 страницDay 3 - PeopleCodeprabindasОценок пока нет
- 11gR2 RAC Openfiler Install Page1 2 3Документ83 страницы11gR2 RAC Openfiler Install Page1 2 3vikОценок пока нет
- ASProtect VM AnalyzeДокумент33 страницыASProtect VM AnalyzegioruwreОценок пока нет
- FIM and The PCI DSSДокумент3 страницыFIM and The PCI DSSkej827Оценок пока нет
- Emtech Module5 Week5 LessonДокумент5 страницEmtech Module5 Week5 LessonMa. Crisanta A. AntonioОценок пока нет
- Review of Related Literature and StudiesДокумент14 страницReview of Related Literature and StudiesRomelyn Gocoyo GustuirОценок пока нет
- Work Bench PDFДокумент25 страницWork Bench PDFJimi DbonoОценок пока нет
- Railway Reservation Oops ProjectДокумент24 страницыRailway Reservation Oops ProjectShamil IqbalОценок пока нет
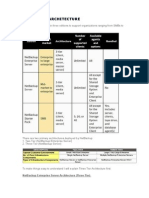
- NBU ArchitectureДокумент3 страницыNBU ArchitecturemaddhisrikanthreddyОценок пока нет
- Fast React Are Specialist Providers of Planning, Sourcing and Critical Path ManagementДокумент3 страницыFast React Are Specialist Providers of Planning, Sourcing and Critical Path ManagementSanghamitra KalitaОценок пока нет
- Common GST Login Problems and SolutionsДокумент3 страницыCommon GST Login Problems and Solutionscalcchamp calculatorОценок пока нет
- Chapter 1 MalikДокумент15 страницChapter 1 MalikPutra Makmur BoangmanaluОценок пока нет
- Retrofitting Repair of Pier No. 2 Urungan BridgeДокумент2 страницыRetrofitting Repair of Pier No. 2 Urungan BridgeJohn Rheynor MayoОценок пока нет
- Software UsageДокумент1 страницаSoftware UsageAshish BagariaОценок пока нет
- C650 ManualДокумент238 страницC650 ManualĐức Nguyễn Xuân100% (1)
- Spesifikasi Bantuan Alat Laboratorium Di Baristand Industri PadangДокумент6 страницSpesifikasi Bantuan Alat Laboratorium Di Baristand Industri PadangjujjjjОценок пока нет
- Paying Guest ManagementДокумент60 страницPaying Guest ManagementVISHNU KОценок пока нет
- Sthira Solns PVT LTD, BangaloreДокумент25 страницSthira Solns PVT LTD, Bangaloreshanmathieswaran07Оценок пока нет
- Database Normalization Explained in 40 CharactersДокумент9 страницDatabase Normalization Explained in 40 Charactersommalae thevidiya payaОценок пока нет
- Zetcode Com Tkinter DrawingДокумент9 страницZetcode Com Tkinter DrawingjhdmssОценок пока нет
- Online Banking AbstractДокумент14 страницOnline Banking AbstractNeelanjal Singh100% (2)
- GDP Report 2021Документ37 страницGDP Report 2021Doğu ManalıОценок пока нет
- Partition and Format a Disk in LinuxДокумент13 страницPartition and Format a Disk in LinuxfopataОценок пока нет