Вам также может понравиться
- Am5766 V1.6Документ10 страницAm5766 V1.6Paulo Roberto s freireОценок пока нет
- Dkg-329 User ManualДокумент43 страницыDkg-329 User ManualKỹ Sư TđhОценок пока нет
- Details Descriptiont Pr18Документ24 страницыDetails Descriptiont Pr18Bili Anderson MolinaОценок пока нет
- Sig-naTrak® MSC8 Scenery Animator User ManualДокумент15 страницSig-naTrak® MSC8 Scenery Animator User ManualSig-naTrak® by GFB DesignsОценок пока нет
- DC Motor Speed Control Using Pulse Width Modulation (PWM)Документ30 страницDC Motor Speed Control Using Pulse Width Modulation (PWM)अमरेश झाОценок пока нет
- CNC Interface Board CM101 ManualДокумент17 страницCNC Interface Board CM101 ManualZorica SolunacОценок пока нет
- VICIДокумент6 страницVICIhaoОценок пока нет
- Ra 02Документ35 страницRa 02Sina MahmoodiОценок пока нет
- Samsung Syncmaster 540n 540b 740n 740b 740t 940b 940t 940n Chassis Ls15hab Ls17hab Ls19hab Haa Hat SMДокумент97 страницSamsung Syncmaster 540n 540b 740n 740b 740t 940b 940t 940n Chassis Ls15hab Ls17hab Ls19hab Haa Hat SMZoran Prokic100% (2)
- Dkg-507 Automatic Mains Failure Unit: Canbus and Mpu VersionsДокумент54 страницыDkg-507 Automatic Mains Failure Unit: Canbus and Mpu VersionsFuqqi BhaiОценок пока нет
- DC Servo Drive: 10V - 30V DC, 50W With ASCII ModbusДокумент35 страницDC Servo Drive: 10V - 30V DC, 50W With ASCII Modbusrajmeet singhОценок пока нет
- Research On Servo Motor Motion Control System BaseДокумент8 страницResearch On Servo Motor Motion Control System BaseAhmed AliОценок пока нет
- GenconДокумент5 страницGenconBruno MarianoОценок пока нет
- Manual/Datasheet SMC800/SMC1500Документ20 страницManual/Datasheet SMC800/SMC1500smc800Оценок пока нет
- Brushless DC Motor Control Using The LPC2141Документ18 страницBrushless DC Motor Control Using The LPC2141Deepa DevarajОценок пока нет
- L293D Motor Driver PDFДокумент6 страницL293D Motor Driver PDFPedro Cu Aguirre100% (1)
- Current Dc3iobДокумент14 страницCurrent Dc3iobsunhuynhОценок пока нет
- OMRON L7 MANUAL EnglishДокумент36 страницOMRON L7 MANUAL EnglishDhanil PattaliОценок пока нет
- Dkg-329 Automatic Transfer Switch With Uninterrupted Transfer and Multiple Genset SupportДокумент43 страницыDkg-329 Automatic Transfer Switch With Uninterrupted Transfer and Multiple Genset SupportLuis Fernando CuaspudОценок пока нет
- DataKom 507 - J - USERДокумент42 страницыDataKom 507 - J - USERKhaleel KhanОценок пока нет
- 9x-9591 Electrical Converter GP (Pulse Width ModulatedДокумент5 страниц9x-9591 Electrical Converter GP (Pulse Width ModulatedSergio Alvarez67% (6)
- PCC2100, PCC3100Документ5 страницPCC2100, PCC3100Giapy Phuc TranОценок пока нет
- Supermodified - Miniature Controller For DC MotorsДокумент38 страницSupermodified - Miniature Controller For DC MotorsGiovanni GambaОценок пока нет
- SIMOREG 6RA70 DC MASTER Electronics: Speed Control With CEMF FeedbackДокумент15 страницSIMOREG 6RA70 DC MASTER Electronics: Speed Control With CEMF FeedbackMancamiaicuru100% (1)
- P-BOT TechManual 1R0 PDFДокумент10 страницP-BOT TechManual 1R0 PDFAngelito Dela CruzОценок пока нет
- 3axis TB6560 Stepper Motor Driver Board Users Instruction: Key FeaturesДокумент9 страниц3axis TB6560 Stepper Motor Driver Board Users Instruction: Key FeaturesDaniela HungОценок пока нет
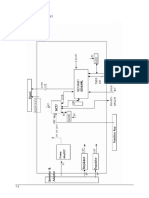
- 7-2 Main Board Part: 7 Block DiagramsДокумент14 страниц7-2 Main Board Part: 7 Block DiagramsAlbert OstОценок пока нет
- Kết Nối Với Pololu Simple Motor ControllerДокумент5 страницKết Nối Với Pololu Simple Motor ControllerAnh VyОценок пока нет
- I-Monitor Motor Controller Manual Rev 7 6Документ72 страницыI-Monitor Motor Controller Manual Rev 7 6elch310scridbОценок пока нет
- Yaskawa TM.J7.01Документ96 страницYaskawa TM.J7.01Salvador CrisantosОценок пока нет
- Generator 307 USERДокумент54 страницыGenerator 307 USERLiviu PopaОценок пока нет
- Monitoring and Control of Single Phase Induction Motor: Power SupplyДокумент16 страницMonitoring and Control of Single Phase Induction Motor: Power SupplydineshkumarОценок пока нет
- PWM Signal Converter - CaterpillarДокумент4 страницыPWM Signal Converter - CaterpillarImad Hmd100% (6)
- Dkg-309 Automatic Mains Failure UnitДокумент47 страницDkg-309 Automatic Mains Failure UnitjbalderramabОценок пока нет
- 9X-9591 - Electrical Converter GP - Pulse Width Modulated - Special Instruction - REHS3413-00 - August 2007 - CATERPILLARДокумент5 страниц9X-9591 - Electrical Converter GP - Pulse Width Modulated - Special Instruction - REHS3413-00 - August 2007 - CATERPILLARAnonymous 0JLsWJC0100% (1)
- Brushless DC Motor DriverДокумент3 страницыBrushless DC Motor Driverkvamsee112Оценок пока нет
- 3512 Throttle Position Error 91-8Документ13 страниц3512 Throttle Position Error 91-8harikrishnanpd3327100% (3)
- Temperature Sensed Motor ControlДокумент10 страницTemperature Sensed Motor ControlminteОценок пока нет
- Up CX 530 EnglishДокумент8 страницUp CX 530 EnglishuongquocvuОценок пока нет
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSДокумент15 страницSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSMardan Sabily Hasibuan100% (2)
- Line Follower Robot Using 8051 Micro ControllerДокумент34 страницыLine Follower Robot Using 8051 Micro Controllerm.abdullah100% (2)
- Driver Motor BrushlesДокумент48 страницDriver Motor BrushlesGONAJ2008Оценок пока нет
- (212142518) Stepper Motor Control Using MicrocontrollerДокумент4 страницы(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiОценок пока нет
- Stepper Motor ControllerДокумент3 страницыStepper Motor Controllerelfrich100% (3)
- Final Report On Line Follower RobotДокумент44 страницыFinal Report On Line Follower RobotAjay Verma50% (4)
- Samsung Sync Master 930bf Chassis Bi17ds Bi19ds Ls17 19bidks SMДокумент74 страницыSamsung Sync Master 930bf Chassis Bi17ds Bi19ds Ls17 19bidks SMBradaric BrunoОценок пока нет
- DataKom 537 - USERДокумент39 страницDataKom 537 - USERKhaleel KhanОценок пока нет
- Instructions For EMCP IIДокумент11 страницInstructions For EMCP IIjose gregorio mata cabezaОценок пока нет
- Cp1l Povezivanje Servo MotoraДокумент10 страницCp1l Povezivanje Servo MotorapredragstojicicОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОт EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОценок пока нет
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosОт EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosРейтинг: 5 из 5 звезд5/5 (1)
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksОт EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksОценок пока нет
- Gizduino v4 Hardware ManualДокумент10 страницGizduino v4 Hardware ManualJohn Carl MarloОценок пока нет
- SIM900 GSM Shield Users ManualДокумент9 страницSIM900 GSM Shield Users ManualEduardo CudiaОценок пока нет
- Optical Fiber Link Design: Cabanatuan CityДокумент19 страницOptical Fiber Link Design: Cabanatuan CityEduardo CudiaОценок пока нет
- Yagi ProjectДокумент9 страницYagi ProjectEduardo CudiaОценок пока нет
- English Six: Using Hope-Can, Wish-Could, Would Expressing Hopes and WishesДокумент1 страницаEnglish Six: Using Hope-Can, Wish-Could, Would Expressing Hopes and WishesEduardo CudiaОценок пока нет
- Decision Making 2Документ22 страницыDecision Making 2Eduardo CudiaОценок пока нет
- Boolean Algebra: ObjectiveДокумент5 страницBoolean Algebra: ObjectiveenvadedОценок пока нет
- Tia 569-AДокумент13 страницTia 569-AEduardo CudiaОценок пока нет
- Tia 916Документ126 страницTia 916Eduardo CudiaОценок пока нет
- Digital Analog Heterodyne Microwave Radio SystemДокумент4 страницыDigital Analog Heterodyne Microwave Radio SystemEduardo CudiaОценок пока нет
- Musical DevicesДокумент26 страницMusical DevicesDave Supat TolentinoОценок пока нет
- MATLAB Simulink IntroductionДокумент4 страницыMATLAB Simulink IntroductionnomaniltafОценок пока нет
- Syllabus BPA Music Carnatic VocalДокумент13 страницSyllabus BPA Music Carnatic Vocal5paisaОценок пока нет
- Set Fire To The Rain Chords Ver. 3 With Lyrics by Adele For Guitar and Ukulele at GuitaretabДокумент2 страницыSet Fire To The Rain Chords Ver. 3 With Lyrics by Adele For Guitar and Ukulele at GuitaretabPierre AnckaertОценок пока нет
- Eric DollardДокумент30 страницEric Dollardgeorge100% (1)
- Compositional Processes From An Ecological Perspective: Keller, DamianДокумент7 страницCompositional Processes From An Ecological Perspective: Keller, DamiansophochaОценок пока нет
- Unit 2 Fundamental Concepts in Video Types of Video SignalsДокумент13 страницUnit 2 Fundamental Concepts in Video Types of Video SignalsEzo'nun BabasıОценок пока нет
- Subsynchronous Resonance in Series Compensated LinesДокумент10 страницSubsynchronous Resonance in Series Compensated LinesBrian HeadОценок пока нет
- South Scope Oct 2010Документ84 страницыSouth Scope Oct 2010kasam193Оценок пока нет
- No Love-Eminem Feat Lil WayneДокумент8 страницNo Love-Eminem Feat Lil WaynecristianensayosОценок пока нет
- Microwave Tube Catalog ENДокумент10 страницMicrowave Tube Catalog ENcgОценок пока нет
- Film ReviewingДокумент2 страницыFilm ReviewingLeonesa Ananias Laus100% (2)
- Sequential Equivalence Final DraftДокумент59 страницSequential Equivalence Final DraftBrian D. BradyОценок пока нет
- Blame It On The BoogieДокумент1 страницаBlame It On The Boogiewilber1977Оценок пока нет
- Small Steps 2m DДокумент4 страницыSmall Steps 2m DJose Edmond RoldanОценок пока нет
- Ear Training Level 1 Student WorkbookДокумент29 страницEar Training Level 1 Student WorkbookJuan Pablo Mier100% (8)
- EPE491 - Power in AC CircuitsДокумент12 страницEPE491 - Power in AC CircuitsNabill HpОценок пока нет
- Minerva Networks Scales Presence in Asia As Regional Investments in Broadband and 5G Infrastructure Spur Video Services UpgradesДокумент2 страницыMinerva Networks Scales Presence in Asia As Regional Investments in Broadband and 5G Infrastructure Spur Video Services UpgradesPR.comОценок пока нет
- The Art of Conduction: A Conduction Workbook: Book ReviewДокумент5 страницThe Art of Conduction: A Conduction Workbook: Book ReviewAdailtonОценок пока нет
- Principles of ArtДокумент17 страницPrinciples of ArtBill Renninger67% (9)
- The Silmarillion: Book Review by John GardnerДокумент4 страницыThe Silmarillion: Book Review by John GardnerJames DouglasОценок пока нет
- Leica Nova MS50 - TS50 - TM50 User ManualДокумент84 страницыLeica Nova MS50 - TS50 - TM50 User ManualbenjaminОценок пока нет
- Int 3. - Assig 2 - Aixa BurgosДокумент2 страницыInt 3. - Assig 2 - Aixa BurgosThiayi-Kumino Uchiha-OtsutukiОценок пока нет
- 59 - Rodney - SherylДокумент112 страниц59 - Rodney - SherylsridigitalОценок пока нет
- A Note On The Sound Radiation From The Classical Guitar Influence of Energy Input Via The String Termination at The FretДокумент4 страницыA Note On The Sound Radiation From The Classical Guitar Influence of Energy Input Via The String Termination at The FretAmaury Jamir Meza PérezОценок пока нет
- EGYHHTT-65B-R6 Product SpecificationsДокумент5 страницEGYHHTT-65B-R6 Product SpecificationsJoshua BerryОценок пока нет
- Controller Editor Ableton Live Template Manual EnglishДокумент51 страницаController Editor Ableton Live Template Manual EnglishD CОценок пока нет
- MML Task Result Add Dcs Bojonggaling XL 20190124 173802Документ62 страницыMML Task Result Add Dcs Bojonggaling XL 20190124 173802elonkmusxОценок пока нет
- Weber, Beckmann - AschenbrödelДокумент15 страницWeber, Beckmann - Aschenbrödelroot80100% (1)
- Klotz - Sounds in Black & WhiteДокумент42 страницыKlotz - Sounds in Black & WhiteHosking RafaelОценок пока нет