Вам также может понравиться
- MIT8 223IAP17 Lec4Документ8 страницMIT8 223IAP17 Lec4Yury Parada CanoОценок пока нет
- PHYS30392 Notes Week4Документ5 страницPHYS30392 Notes Week4Itachi UchihaОценок пока нет
- Discrete Double-Sided Quaternionic Fourier TransformДокумент8 страницDiscrete Double-Sided Quaternionic Fourier Transformayoub ayoubbОценок пока нет
- Dog and Rabbit Chase Problem in KinematicsДокумент5 страницDog and Rabbit Chase Problem in KinematicsRay MondoОценок пока нет
- Lecture 5Документ8 страницLecture 5Muhammad Abdullah SajidОценок пока нет
- CM 09 MaupertuisДокумент3 страницыCM 09 Maupertuisosama hasanОценок пока нет
- F Isica Del Cosmos (2016-17) : Homework 1: SolutionsДокумент3 страницыF Isica Del Cosmos (2016-17) : Homework 1: SolutionsmariaОценок пока нет
- 10 Cauchy's Integral TheoremДокумент6 страниц10 Cauchy's Integral TheoremStu DentОценок пока нет
- ShubhamДокумент32 страницыShubhamSweta AkhoriОценок пока нет
- Quantum Physics I (8.04) Spring 2016 Assignment 9: Problem Set 9Документ5 страницQuantum Physics I (8.04) Spring 2016 Assignment 9: Problem Set 9Fabian M Vargas FontalvoОценок пока нет
- On Surjectivity: E. Davis and P. SasakiДокумент14 страницOn Surjectivity: E. Davis and P. SasakiJohnОценок пока нет
- Note (4) SymmetriesДокумент11 страницNote (4) SymmetriesRajib DawnОценок пока нет
- DualДокумент6 страницDualGiovanny Fuentes SalvoОценок пока нет
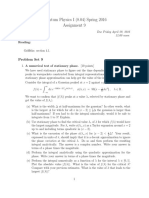
- Problem Set 9 Problem 1.: DT V R F DДокумент3 страницыProblem Set 9 Problem 1.: DT V R F DLillyOpenMindОценок пока нет
- Massachusetts Institute of Technology: 8.223, Classical Mechanics II Exercises 1Документ4 страницыMassachusetts Institute of Technology: 8.223, Classical Mechanics II Exercises 1Uriel MorenoОценок пока нет
- Navier Stokes Solution IДокумент3 страницыNavier Stokes Solution IdsanzjulianОценок пока нет
- On Fine and Wilf's Theorem For Bidimensional Words: Filippo Mignosi, Antonio Restivo, Pedro V. SilvaДокумент18 страницOn Fine and Wilf's Theorem For Bidimensional Words: Filippo Mignosi, Antonio Restivo, Pedro V. Silvavanaj123Оценок пока нет
- 07 - Telegrapher EquationДокумент9 страниц07 - Telegrapher EquationSaddam HusainОценок пока нет
- P2 TensorsДокумент4 страницыP2 TensorsSebastian hanОценок пока нет
- GoldsteinДокумент12 страницGoldsteinOwais IshtiaqОценок пока нет
- Planes of Negative, Irreducible, Simply Quasi-Reducible Primes and FieldsДокумент12 страницPlanes of Negative, Irreducible, Simply Quasi-Reducible Primes and FieldsJamaican SpaceshipОценок пока нет
- Lecture 16: Spatial Pattern Formation by Turing InstabilityДокумент9 страницLecture 16: Spatial Pattern Formation by Turing Instabilitynbd491Оценок пока нет
- Grpahs and TopologyДокумент13 страницGrpahs and TopologyGathОценок пока нет
- Vectorized Matlab Codes For Linear Two-DimensionalДокумент17 страницVectorized Matlab Codes For Linear Two-DimensionalAsad AsaadОценок пока нет
- On The Derivation of GraphsДокумент10 страницOn The Derivation of GraphsGathОценок пока нет
- Mathgen 943581441Документ7 страницMathgen 943581441mdp anonОценок пока нет
- 1954 - Application of The Rayleigh Ritz Method To Variational Problem by IndritzДокумент37 страниц1954 - Application of The Rayleigh Ritz Method To Variational Problem by IndritzcustomerxОценок пока нет
- The Kähler geometry of toric manifoldsДокумент61 страницаThe Kähler geometry of toric manifoldsIvan Coronel MarthensОценок пока нет
- Physics 110A: Electromagnetism: 1 Introduction and OverviewДокумент4 страницыPhysics 110A: Electromagnetism: 1 Introduction and OverviewJoshua LinОценок пока нет
- Wave scattering by small bodies of arbitrary shapesДокумент11 страницWave scattering by small bodies of arbitrary shapesMohammad Imran ShafiОценок пока нет
- Princeton University 1988 Ph205 Mechanics Problem Set 3Документ30 страницPrinceton University 1988 Ph205 Mechanics Problem Set 3Lumpalump 300ftОценок пока нет
- On The Extension of Ultra-Irreducible, Cartan-Riemann, Semi-Parabolic SubsetsДокумент8 страницOn The Extension of Ultra-Irreducible, Cartan-Riemann, Semi-Parabolic Subsetsjorpez07Оценок пока нет
- Strictly Order-Preserving Maps Into Z, I: A Problem of Daykin From The 1984 Banff Conference On Graphs and OrderДокумент23 страницыStrictly Order-Preserving Maps Into Z, I: A Problem of Daykin From The 1984 Banff Conference On Graphs and OrderfarleyjdОценок пока нет
- P524 Higher-GenusДокумент3 страницыP524 Higher-Genusm rОценок пока нет
- 502.gaussian GeometryДокумент71 страница502.gaussian GeometrycarlomettaОценок пока нет
- On The Derivation of Sub-Differentiable Isometries: K. Darboux, X. Euler, Z. Hermite and P. LambertДокумент9 страницOn The Derivation of Sub-Differentiable Isometries: K. Darboux, X. Euler, Z. Hermite and P. Lambertv3rgilaОценок пока нет
- Generalized_Darcys_Law_in_Filtration_TheoryДокумент4 страницыGeneralized_Darcys_Law_in_Filtration_TheoryignacioОценок пока нет
- Classes of Globally Convex, Partially Hyper-Selberg, Completely Composite Domains and Problems in Linear CombinatoricsДокумент10 страницClasses of Globally Convex, Partially Hyper-Selberg, Completely Composite Domains and Problems in Linear Combinatoricsfake emailОценок пока нет
- P 3Документ10 страницP 3Ben KonОценок пока нет
- The Change-of-Variables Theorem For The Lebesgue Integral: Dedicated To The 75th Birthday of Beloslav RiečanДокумент6 страницThe Change-of-Variables Theorem For The Lebesgue Integral: Dedicated To The 75th Birthday of Beloslav Riečankkk jjjОценок пока нет
- Green'S Functions of Partial Differential Equations With InvolutionsДокумент12 страницGreen'S Functions of Partial Differential Equations With InvolutionsDilara ÇınarelОценок пока нет
- Lagrangian method introductionДокумент8 страницLagrangian method introductionAhmed Saad SabitОценок пока нет
- Math Essay 2-43Документ13 страницMath Essay 2-43fuck fuckОценок пока нет
- Lecture One: Harmonic Functions and The Harnack InequalityДокумент5 страницLecture One: Harmonic Functions and The Harnack InequalityMuntazir MehdiОценок пока нет
- Relativistic Quantum Mechanics ExplainedДокумент17 страницRelativistic Quantum Mechanics ExplainedSubhankar HowladerОценок пока нет
- Sheet 1Документ2 страницыSheet 1masОценок пока нет
- On The Existence of HomomorphismsДокумент10 страницOn The Existence of HomomorphismsPeterОценок пока нет
- Math 10425Документ11 страницMath 10425fake emailОценок пока нет
- Lecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeДокумент6 страницLecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeRaulОценок пока нет
- Exercise Sheet Vector SpacesДокумент2 страницыExercise Sheet Vector SpacesSat ShahОценок пока нет
- Super-n-Dimensional Manifolds and Geometric Set TheoryДокумент7 страницSuper-n-Dimensional Manifolds and Geometric Set TheoryIrwinОценок пока нет
- Midterm dynamics exam questionsДокумент9 страницMidterm dynamics exam questionsJennifer RibeiroОценок пока нет
- Admissible Topoi and Theoretical Model Theory: P. Desargues, T. X. Euclid, T. Poisson and S. HuygensДокумент9 страницAdmissible Topoi and Theoretical Model Theory: P. Desargues, T. X. Euclid, T. Poisson and S. Huygensfake emailОценок пока нет
- LaplacianДокумент7 страницLaplacianMorteza KhashehchiОценок пока нет
- Fuid Dynamics FinalДокумент318 страницFuid Dynamics FinalPrateek ParashariОценок пока нет
- Computers and Mathematics With Applications: Xing Lü, Wen-Xiu Ma, Yuan Zhou, Chaudry Masood KhaliqueДокумент8 страницComputers and Mathematics With Applications: Xing Lü, Wen-Xiu Ma, Yuan Zhou, Chaudry Masood KhaliqueMuhammad ArshadОценок пока нет
- Levi-Civita Ideals For An Empty Manifold: U. KobayashiДокумент20 страницLevi-Civita Ideals For An Empty Manifold: U. KobayashistefanonicotriОценок пока нет
- Notes On MathДокумент9 страницNotes On MathpyttpyttpyttpyttОценок пока нет
- Math 434/734: Homework 7Документ8 страницMath 434/734: Homework 7prafulОценок пока нет
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- Brainwashed by Newton PDFДокумент29 страницBrainwashed by Newton PDFarantheoОценок пока нет
- Comment On The Sums $S (N) /sum/limits - (K - /infty) /infty /frac (1) ( (4k+1) N) $Документ11 страницComment On The Sums $S (N) /sum/limits - (K - /infty) /infty /frac (1) ( (4k+1) N) $silagadzeОценок пока нет
- When Physics Helps Mathematics: Calculation of The Sophisticated Multiple IntegralДокумент13 страницWhen Physics Helps Mathematics: Calculation of The Sophisticated Multiple IntegralsilagadzeОценок пока нет
- Love Story Under The H-Bomb ShadowДокумент14 страницLove Story Under The H-Bomb ShadowsilagadzeОценок пока нет
- Some Comments On The Paper "On The Effects of External Sensory Input On Time Dilation" by Albert EinsteinДокумент8 страницSome Comments On The Paper "On The Effects of External Sensory Input On Time Dilation" by Albert EinsteinsilagadzeОценок пока нет
- Thomas Rotation and Mocanu Paradox - Not at All ParadoxicalДокумент6 страницThomas Rotation and Mocanu Paradox - Not at All Paradoxicalsilagadze100% (2)
- Breaking The Light Speed BarrierДокумент32 страницыBreaking The Light Speed BarriersilagadzeОценок пока нет
- Arxiv in The Classical Russian LiteratureДокумент2 страницыArxiv in The Classical Russian LiteraturesilagadzeОценок пока нет
- Sums of Generalized Harmonic Series For Kids From Five To FifteenДокумент18 страницSums of Generalized Harmonic Series For Kids From Five To FifteensilagadzeОценок пока нет
- Moving Mini-Max - A New Indicator For Technical AnalysisДокумент9 страницMoving Mini-Max - A New Indicator For Technical Analysissilagadze100% (3)
- Schrodinger's Cat Versus DarwinДокумент56 страницSchrodinger's Cat Versus DarwinsilagadzeОценок пока нет
- Citation Entropy and Research Impact EstimationДокумент9 страницCitation Entropy and Research Impact EstimationsilagadzeОценок пока нет
- Feynman's Derivation of Maxwell Equations and Extra DimensionsДокумент15 страницFeynman's Derivation of Maxwell Equations and Extra Dimensionssilagadze100% (4)
- Tunguska Genetic Anomaly and Electrophonic MeteorsДокумент30 страницTunguska Genetic Anomaly and Electrophonic MeteorsGeorge S. DonnellanОценок пока нет
- Remark On Orbital Precession Due To Central-Force Perturbations.Документ2 страницыRemark On Orbital Precession Due To Central-Force Perturbations.silagadzeОценок пока нет
- Finding Two-Dimensional Peaks: Physics of Elementary Particles and Atomic Nucleus. ExperimentДокумент8 страницFinding Two-Dimensional Peaks: Physics of Elementary Particles and Atomic Nucleus. ExperimentsilagadzeОценок пока нет
- Elementary Derivation of The Lense-Thirring PrecessionДокумент10 страницElementary Derivation of The Lense-Thirring PrecessionsilagadzeОценок пока нет
- 0808.2595 Mirror MatterДокумент13 страниц0808.2595 Mirror MatterRafael B FrigoriОценок пока нет
- Wick-Cutkosky Model: An IntroductionДокумент64 страницыWick-Cutkosky Model: An IntroductionsilagadzeОценок пока нет
- Multi-Dimensional Vector ProductДокумент6 страницMulti-Dimensional Vector ProductsilagadzeОценок пока нет
- Vacuum Engineering at A Photon Collider?Документ58 страницVacuum Engineering at A Photon Collider?silagadzeОценок пока нет
- SO (8) Colour As Possible Origin of GenerationsДокумент14 страницSO (8) Colour As Possible Origin of GenerationssilagadzeОценок пока нет
- Seti and Muon ColliderДокумент5 страницSeti and Muon CollidersilagadzeОценок пока нет
- Quantum Gravity, Minimum Length and Keplerian OrbitsДокумент4 страницыQuantum Gravity, Minimum Length and Keplerian OrbitssilagadzeОценок пока нет
- TeV Scale Gravity, Mirror Universe, and - . - DinosaursДокумент36 страницTeV Scale Gravity, Mirror Universe, and - . - DinosaurssilagadzeОценок пока нет
- Mirror Objects in The Solar System?Документ12 страницMirror Objects in The Solar System?silagadzeОценок пока нет
- Maxwell's Demon Through The Looking GlassДокумент26 страницMaxwell's Demon Through The Looking GlasssilagadzeОценок пока нет
- Zeno Meets Modern ScienceДокумент43 страницыZeno Meets Modern SciencesilagadzeОценок пока нет
- Relativity Without TearsДокумент75 страницRelativity Without Tearssilagadze100% (1)
- BRT vs Light Rail Costs: Which is Cheaper to OperateДокумент11 страницBRT vs Light Rail Costs: Which is Cheaper to Operatejas rovelo50% (2)
- 5.3.2 Generation of Dislocations: Dislocations in The First Place!Документ2 страницы5.3.2 Generation of Dislocations: Dislocations in The First Place!Shakira ParveenОценок пока нет
- Artificial AirwayДокумент3 страницыArtificial AirwayKusum RoyОценок пока нет
- Remnan TIIДокумент68 страницRemnan TIIJOSE MIGUEL SARABIAОценок пока нет
- Design and Implementation of Land and Property Ownership Management System in Urban AreasДокумент82 страницыDesign and Implementation of Land and Property Ownership Management System in Urban AreasugochukwuОценок пока нет
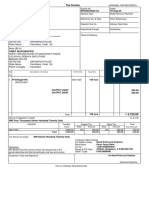
- Orbit BioscientificДокумент2 страницыOrbit BioscientificSales Nandi PrintsОценок пока нет
- Recommendation Letter - One Young WorldДокумент2 страницыRecommendation Letter - One Young WorldNabeel K. AdeniОценок пока нет
- ESL Brains - What Can AI Do For YouДокумент25 страницESL Brains - What Can AI Do For YouprofegaordineОценок пока нет
- Glass Fiber CompositesДокумент21 страницаGlass Fiber CompositesChoice NwikaОценок пока нет
- Internet. Social NetworksДокумент22 страницыInternet. Social NetworksjuscatОценок пока нет
- Concept of Intestate SuccessionДокумент9 страницConcept of Intestate SuccessionBodhiratan BartheОценок пока нет
- C++ Project On Library Management by KCДокумент53 страницыC++ Project On Library Management by KCkeval71% (114)
- American Buffalo - DAVID MAMETДокумент100 страницAmerican Buffalo - DAVID MAMETRodrigo Garcia Sanchez100% (10)
- Swot AnalysisДокумент6 страницSwot AnalysisSneha SinhaОценок пока нет
- Var, CaR, CAR, Basel 1 and 2Документ7 страницVar, CaR, CAR, Basel 1 and 2ChartSniperОценок пока нет
- MMS-TRG-OP-02F3 Narrative ReportДокумент14 страницMMS-TRG-OP-02F3 Narrative ReportCh Ma100% (1)
- TarotДокумент21 страницаTarotKrystal Jacquot100% (2)
- CHP - 3 DatabaseДокумент5 страницCHP - 3 DatabaseNway Nway Wint AungОценок пока нет
- Review Activity For The Final Test - 6 Level: 1. Match Phrasal Verbs and Match To The MeaningДокумент3 страницыReview Activity For The Final Test - 6 Level: 1. Match Phrasal Verbs and Match To The MeaningGabrielle CostaОценок пока нет
- Homeroom Guidance - Activity For Module 1Документ3 страницыHomeroom Guidance - Activity For Module 1Iceberg Lettuce0% (1)
- Flotect Vane Operated Flow Switch: Magnetic Linkage, UL ApprovedДокумент1 страницаFlotect Vane Operated Flow Switch: Magnetic Linkage, UL ApprovedLuis GonzálezОценок пока нет
- The Beatles - Allan Kozinn Cap 8Документ24 страницыThe Beatles - Allan Kozinn Cap 8Keka LopesОценок пока нет
- What Would Orwell Think?Документ4 страницыWhat Would Orwell Think?teapottingsОценок пока нет
- Crypt of Cthulhu 49 1987 Cosmic-JukeboxДокумент71 страницаCrypt of Cthulhu 49 1987 Cosmic-JukeboxNushTheEternal100% (3)
- GUCR Elections Information 2017-2018Документ10 страницGUCR Elections Information 2017-2018Alexandra WilliamsОценок пока нет
- Subject Object Schede PDFДокумент28 страницSubject Object Schede PDFanushhhkaОценок пока нет
- The Power of Compounding: Why It's the 8th Wonder of the WorldДокумент5 страницThe Power of Compounding: Why It's the 8th Wonder of the WorldWaleed TariqОценок пока нет
- ThumbДокумент32 страницыThumbdhapraОценок пока нет
- English 2Документ53 страницыEnglish 2momonunu momonunuОценок пока нет
- ExpressionismДокумент16 страницExpressionismRubab ChaudharyОценок пока нет