Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Sample Prespective PlanДокумент10 страницSample Prespective PlanAnikendu MaitraОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Electricalsystemsinabuilding 150911082119 Lva1 App6892Документ137 страницElectricalsystemsinabuilding 150911082119 Lva1 App6892Anikendu MaitraОценок пока нет
- PEOs EEДокумент1 страницаPEOs EEAnikendu MaitraОценок пока нет
- Internal Wiring Systems and Lamp Circuits: After The MainДокумент207 страницInternal Wiring Systems and Lamp Circuits: After The MainAnikendu MaitraОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
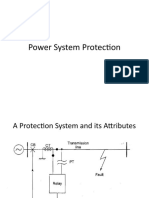
- ProtДокумент15 страницProtAnikendu MaitraОценок пока нет
- Verification of Ohms LawДокумент2 страницыVerification of Ohms LawAnikendu MaitraОценок пока нет
- Relay Coordination in Microgrid: Pallavi P.Bagul, Prof - Sonali M.AkolkarДокумент6 страницRelay Coordination in Microgrid: Pallavi P.Bagul, Prof - Sonali M.AkolkarAnikendu MaitraОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Indiv - EE DeptДокумент28 страницIndiv - EE DeptAnikendu MaitraОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Induction Motor StarterДокумент5 страницInduction Motor StarterAnikendu MaitraОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- 5574 30664 1 PBДокумент11 страниц5574 30664 1 PBAnikendu MaitraОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Industrial and Allied Electrical Systems-47-82Документ36 страницIndustrial and Allied Electrical Systems-47-82Anikendu MaitraОценок пока нет
- Repair Note Sheet September 2019Документ1 страницаRepair Note Sheet September 2019Anikendu MaitraОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Relay Coordina Distribution Netwo Ation and Harmonic Ana Ork With Over 20% Renew Alysis in A Wable SourcesДокумент6 страницRelay Coordina Distribution Netwo Ation and Harmonic Ana Ork With Over 20% Renew Alysis in A Wable SourcesAnikendu MaitraОценок пока нет
- Sports Volunteers 2023Документ2 страницыSports Volunteers 2023Anikendu MaitraОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Basic Lab Question 2021 For Group B Final 2Документ15 страницBasic Lab Question 2021 For Group B Final 2Anikendu MaitraОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Exp No.15Документ6 страницExp No.15Anikendu MaitraОценок пока нет
- RLC POWER AND POWER FACTOR December 2021Документ41 страницаRLC POWER AND POWER FACTOR December 2021Anikendu MaitraОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- EE - 2022 Even Sem Routine (24.11.22)Документ11 страницEE - 2022 Even Sem Routine (24.11.22)Anikendu MaitraОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Note Sheet Tachometer December 2021Документ1 страницаNote Sheet Tachometer December 2021Anikendu MaitraОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- White ScreenДокумент1 страницаWhite ScreenAnikendu MaitraОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Temporary - Routine-1st-Sem - 24-11-2022Документ14 страницTemporary - Routine-1st-Sem - 24-11-2022Anikendu MaitraОценок пока нет
- Laptop and ProjectorДокумент1 страницаLaptop and ProjectorAnikendu MaitraОценок пока нет
- List of FilesДокумент2 страницыList of FilesAnikendu MaitraОценок пока нет
- KutchinaДокумент2 страницыKutchinaAnikendu MaitraОценок пока нет
- NITTTR Kolkata: Development of Lesson PlanДокумент57 страницNITTTR Kolkata: Development of Lesson PlanAnikendu MaitraОценок пока нет
- Hod Nomination - Top 3 - G23Документ2 страницыHod Nomination - Top 3 - G23Anikendu MaitraОценок пока нет
- Optimal Placement and Sizing of Distributed Generations in Distribution Systems For Minimizing Losses and THD V Using Evolutionary ProgrammingДокумент15 страницOptimal Placement and Sizing of Distributed Generations in Distribution Systems For Minimizing Losses and THD V Using Evolutionary ProgrammingAnikendu MaitraОценок пока нет
- It Is Necessary To Explain and Justify Your Answer: Model QuestionsДокумент7 страницIt Is Necessary To Explain and Justify Your Answer: Model QuestionsAnikendu MaitraОценок пока нет
- Insulators For Overhead Lines: Presented by Anikendu MaitraДокумент89 страницInsulators For Overhead Lines: Presented by Anikendu MaitraAnikendu MaitraОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Downloads Papers N58496dfeaf12eДокумент5 страницDownloads Papers N58496dfeaf12eAnikendu MaitraОценок пока нет
- Integra Facade BrochureДокумент2 страницыIntegra Facade BrochureHarshit PatadiyaОценок пока нет
- Volvo HU 803Документ8 страницVolvo HU 803GiegloОценок пока нет
- IOM - Rampa Hidráulica - Blue GiantДокумент32 страницыIOM - Rampa Hidráulica - Blue GiantPATRICIA HERNANDEZОценок пока нет
- Birth Trauma and Post Traumatic Stress Disorder The Importance of Risk and ResilienceДокумент5 страницBirth Trauma and Post Traumatic Stress Disorder The Importance of Risk and ResilienceMsRockPhantomОценок пока нет
- Unit 1: Power and Responsibility: 1. Important Leadership QualitiesДокумент6 страницUnit 1: Power and Responsibility: 1. Important Leadership QualitiesTrần Thanh MinhОценок пока нет
- Project 4 Close TestДокумент7 страницProject 4 Close TestErika MolnarОценок пока нет
- Nc4 Student BookДокумент128 страницNc4 Student Book178798156Оценок пока нет
- Office Administration: School-Based AssessmentДокумент17 страницOffice Administration: School-Based AssessmentFelix LawrenceОценок пока нет
- (Database Management Systems) : Biag, Marvin, B. BSIT - 202 September 6 2019Документ7 страниц(Database Management Systems) : Biag, Marvin, B. BSIT - 202 September 6 2019Marcos JeremyОценок пока нет
- Week 2 - Sulphur DyesДокумент5 страницWeek 2 - Sulphur DyesRR TОценок пока нет
- Rubric For Audio Speech DeliveryДокумент2 страницыRubric For Audio Speech DeliveryMarie Sol PanganОценок пока нет
- Benchmark Leadership Philosphy Ead 501Документ5 страницBenchmark Leadership Philosphy Ead 501api-494301924Оценок пока нет
- Ojt Evaluation Forms (Supervised Industry Training) SampleДокумент5 страницOjt Evaluation Forms (Supervised Industry Training) SampleJayJay Jimenez100% (3)
- Basics PDFДокумент21 страницаBasics PDFSunil KumarОценок пока нет
- Age and Gender Detection Using Deep Learning: HYDERABAD - 501 510Документ11 страницAge and Gender Detection Using Deep Learning: HYDERABAD - 501 510ShyamkumarBannuОценок пока нет
- Terasaki FDP 2013Документ40 страницTerasaki FDP 2013MannyBaldonadoDeJesus100% (1)
- Oss Kpi SummaryДокумент7 страницOss Kpi SummaryMohd FaizОценок пока нет
- Car Section 2 Series (H) Part-IiДокумент6 страницCar Section 2 Series (H) Part-Iipandurang nalawadeОценок пока нет
- TMA GuideДокумент3 страницыTMA GuideHamshavathini YohoratnamОценок пока нет
- Final Project Synopsis 1Документ90 страницFinal Project Synopsis 1Shyam YadavОценок пока нет
- CNNPX310R-6P: General SpecificationsДокумент5 страницCNNPX310R-6P: General SpecificationsZoheir KacimiОценок пока нет
- Module 1 Dynamics of Rigid BodiesДокумент11 страницModule 1 Dynamics of Rigid BodiesBilly Joel DasmariñasОценок пока нет
- Registration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaДокумент3 страницыRegistration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaAna IrinaОценок пока нет
- Woldia University: A Non Ideal TransformerДокумент24 страницыWoldia University: A Non Ideal TransformerKANDEGAMA H.R. (BET18077)Оценок пока нет
- CNC Manuel de Maintenance 15i 150i ModelAДокумент526 страницCNC Manuel de Maintenance 15i 150i ModelASebautomatismeОценок пока нет
- Remediation of AlphabetsДокумент34 страницыRemediation of AlphabetsAbdurahmanОценок пока нет
- The Making of A Scientist Class 10Документ2 страницыThe Making of A Scientist Class 10abhigna.ravikumarОценок пока нет
- Synthesis Essay Final DraftДокумент5 страницSynthesis Essay Final Draftapi-283802944Оценок пока нет
- Project Synopsis On LAN ConnectionДокумент15 страницProject Synopsis On LAN ConnectionডৰাজবংশীОценок пока нет
- Diffrent Types of MapДокумент3 страницыDiffrent Types of MapIan GamitОценок пока нет
- Electric Motor Control: DC, AC, and BLDC MotorsОт EverandElectric Motor Control: DC, AC, and BLDC MotorsРейтинг: 4.5 из 5 звезд4.5/5 (19)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesОт EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesРейтинг: 4.5 из 5 звезд4.5/5 (21)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceОт EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceОценок пока нет
- Electric Motors and Drives: Fundamentals, Types and ApplicationsОт EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AОт EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AОценок пока нет