Вам также может понравиться
- Metodo SaraДокумент43 страницыMetodo SaraLuis José Mavarez100% (1)
- Digestores - Paracel 2021 VFДокумент43 страницыDigestores - Paracel 2021 VFJohana Cardozo de PerezОценок пока нет
- Inyección ElectrónicaДокумент47 страницInyección ElectrónicaZuleika Suarez100% (1)
- Procesos Termodinamicos SolucionДокумент30 страницProcesos Termodinamicos SolucionErik victor Anchivilca ZavaletaОценок пока нет
- Prueba de Diagnostico Tecnologia 8 BasicoДокумент4 страницыPrueba de Diagnostico Tecnologia 8 BasicoCaroline Renee Rojas MirandaОценок пока нет
- Robot PDFДокумент9 страницRobot PDFMarco RodríguezОценок пока нет
- Modelo Dinámico 2R-P PDFДокумент15 страницModelo Dinámico 2R-P PDFMarco RodríguezОценок пока нет
- Tarea 8 PDFДокумент5 страницTarea 8 PDFMarco RodríguezОценок пока нет
- Determinante Ángulos de Bryant y EulerДокумент2 страницыDeterminante Ángulos de Bryant y EulerMarco RodríguezОценок пока нет
- RHONNДокумент13 страницRHONNMarco RodríguezОценок пока нет
- Listado Casatoro Precios Lubricantes Marzo 2022Документ3 страницыListado Casatoro Precios Lubricantes Marzo 2022OSCAR BERNARDO BARRANTES RODRIGUEZОценок пока нет
- PRUEBA CIENCIA 6° COEF 2 2019 II SemestreДокумент5 страницPRUEBA CIENCIA 6° COEF 2 2019 II SemestreisabelОценок пока нет
- Motor EléctricoДокумент7 страницMotor EléctricoBlidts SandyОценок пока нет
- Sucesos: Avisos FúnebresДокумент1 страницаSucesos: Avisos FúnebresJonatan AldereteОценок пока нет
- Concepto de Riesgo en El TrabajoДокумент2 страницыConcepto de Riesgo en El TrabajoKarol LeitonОценок пока нет
- Arranque y Control de Velocidad de Los Motores de InduccionДокумент8 страницArranque y Control de Velocidad de Los Motores de InduccionMartínez MartinezОценок пока нет
- Lita de Precios de RefrielcaДокумент11 страницLita de Precios de Refrielcaelvin alfonso briceño viloriaОценок пока нет
- FUNDICIONДокумент60 страницFUNDICIONSebas BuitragoОценок пока нет
- Electro SurДокумент2 страницыElectro SurOmar Gabriel RGОценок пока нет
- Campo MagnéticoДокумент5 страницCampo MagnéticoDarwin Brayan Cruz CoronadoОценок пока нет
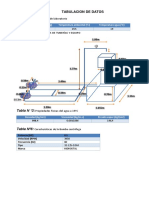
- Tabulacion de DatosnuevoДокумент29 страницTabulacion de DatosnuevoMarvin AguirreОценок пока нет
- Bases Concurso CafescaДокумент9 страницBases Concurso CafescaJuan Carlos ConstantinoОценок пока нет
- Recomendaciones Motores DCДокумент4 страницыRecomendaciones Motores DCarman_3408366Оценок пока нет
- Semana 7 VicenteДокумент5 страницSemana 7 VicenteAbisael CortesОценок пока нет
- Funcionamiento de Un Sistema NeumáticoДокумент13 страницFuncionamiento de Un Sistema NeumáticoJc TorkeОценок пока нет
- Agitacion 22222Документ8 страницAgitacion 22222gloriaОценок пока нет
- 13 - Ficha EspectrosДокумент8 страниц13 - Ficha EspectrosMario MartinОценок пока нет
- Problema Resuelto 4 - Ciclo CogenerativoДокумент4 страницыProblema Resuelto 4 - Ciclo Cogenerativojose peñalbaОценок пока нет
- Odi EnfierradorДокумент2 страницыOdi EnfierradorCristian LarrainОценок пока нет
- SSSSSSSSSSSSSДокумент35 страницSSSSSSSSSSSSSJose SullcaОценок пока нет
- Macroproceso Ejemplo PDFДокумент145 страницMacroproceso Ejemplo PDFGonzalo Escobar ArevaloОценок пока нет
- Ejercicios de Calor y Temperatura para Quinto Grado de SecundariaДокумент6 страницEjercicios de Calor y Temperatura para Quinto Grado de SecundariaPaola4528Оценок пока нет
- Pruebas No Destructivas para El Concreto EndurecidoДокумент29 страницPruebas No Destructivas para El Concreto EndurecidoRicardoRuelasAndrade'0% (1)
- Plantas RegasificacionДокумент5 страницPlantas RegasificacionBriian Gii'lОценок пока нет